Protection, Substation Automation, Power Quality and Measurement
6.2 Protection Systems
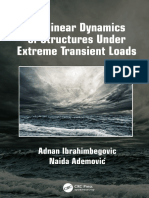
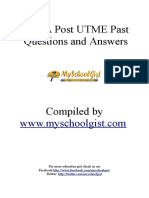
Motor feeders The energization of motors causes a starting current of initially 5 to 6 times the rated current (locked rotor current). A typical time-current curve for an induction motor is shown in g. 6.2-113. In the rst 100 ms, a fast-decaying asymmetrical inrush current also appears. With conventional relays, it was common practice to set the instantaneous overcurrent stage of the short-circuit protection 20 to 30 % above the locked rotor current with a short-time delay of 50 to 100 ms to override the asymmetrical inrush period. Numerical relays are able to lter out the asymmetrical current component very rapidly so that the setting of an additional time delay is no longer applicable. The overload protection characteristic should follow the thermal motor characteristic as closely as possible. The adaptation is made by setting the pickup value and the thermal time constant, using the data supplied by the motor manufacturer. Furthermore, the locked-rotor protection timer has to be set according to the characteristic motor value. Time grading of overcurrent relays (51) The selectivity of overcurrent protection is based on time grading of the relay operating characteristics. The relay closer to the infeed (upstream relay) is time-delayed against the relay further away from the infeed (downstream relay). The calculation of necessary grading times is shown in g. 6.2-113 by an example for denite-time overcurrent relays. The overshoot times take into account the fact that the measuring relay continues to operate due to its inertia, even if when the fault current is interrupted. This may be high for mechanical relays (about 0.1 s) and negligible for numerical relays (20 ms). Inverse-time relays (51) For the time grading of inverse-time relays, in principle the same rules apply as for the denite-time relays. The time grading is rst calculated for the maximum fault level and then checked for lower current levels (g. 6.2-114). If the same characteristic is used for all relays, or if when the upstream relay has a steeper characteristic (e.g., very much over normal inverse), then selectivity is automatically fullled at lower currents. Differential relay (87) Transformer differential relays are normally set to pickup values between 20 and 30 % of the rated current. The higher value has to be chosen when the transformer is tted with a tap changer. Restricted earth-fault relays and high-resistance motor / generator differential relays are, as a rule, set to about 10 % of the rated current.
10,000 1,000 Time in seconds 100 10 1 0.1 0.01 0.001 0 1 2 3 4 5 6 7 8 9 10
Current in multiplies of full-load amps Motor starting current Locked-rotor current Overload protection characteristic High set instantaneous O/C stage Motor thermal limit curve Permissible locked-rotor time
Fig. 6.2-113: Typical motor current-time characteristics
Time
51
51
51
Main Feeder Maximum feeder fault level
0.2-0.4 seconds Current
Fig. 6.2-114: Coordination of inverse-time relays
lnstantaneous overcurrent protection (50) This is typically applied on the nal supply load or on any protection relay with sufcient circuit impedance between itself and the next downstream protection relay. The setting at transformers, for example, must be chosen about 20 to 30 % higher than the maximum through-fault current. The relay must remain stable during energization of the transformer.
Siemens Energy Sector Power Engineering Guide Edition 7.0
321
Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Tips For Daylighting 2013Dokument137 SeitenTips For Daylighting 2013mydearteacherNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Sustentabilidade Materiais Construcao 69Dokument1 SeiteSustentabilidade Materiais Construcao 69mydearteacherNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Sustentabilidade Materiais Construcao 41Dokument1 SeiteSustentabilidade Materiais Construcao 41mydearteacherNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Sustentabilidade Materiais Construcao 67Dokument1 SeiteSustentabilidade Materiais Construcao 67mydearteacherNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Philips Lighting Manual 5ft Ed R1Dokument111 SeitenPhilips Lighting Manual 5ft Ed R1mydearteacherNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Siemens Power Engineering Guide 7E 521Dokument1 SeiteSiemens Power Engineering Guide 7E 521mydearteacherNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Siemens Power Engineering Guide 7E 514Dokument1 SeiteSiemens Power Engineering Guide 7E 514mydearteacherNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Siemens Power Engineering Guide 7E 495Dokument1 SeiteSiemens Power Engineering Guide 7E 495mydearteacherNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Siemens Power Engineering Guide 7E 505Dokument1 SeiteSiemens Power Engineering Guide 7E 505mydearteacherNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Siemens Power Engineering Guide 7E 506Dokument1 SeiteSiemens Power Engineering Guide 7E 506mydearteacherNoch keine Bewertungen
- Siemens Power Engineering Guide 7E 489Dokument1 SeiteSiemens Power Engineering Guide 7E 489mydearteacherNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Siemens Power Engineering Guide 7E 490Dokument1 SeiteSiemens Power Engineering Guide 7E 490mydearteacherNoch keine Bewertungen
- Antistat: Online Air IonizerDokument8 SeitenAntistat: Online Air IonizerGhaziNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Magnetic and Gyro Compass and Steering Systems - B.J. WaDokument71 SeitenMagnetic and Gyro Compass and Steering Systems - B.J. Wamaneesh100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Power Characteristics of BLDC Motor For Design of E-Powered Agricultural MachineDokument11 SeitenPower Characteristics of BLDC Motor For Design of E-Powered Agricultural MachineGurkanwal Singh ThindNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Lab 7: Magnetic SurveyingDokument2 SeitenLab 7: Magnetic SurveyingAshrafNoch keine Bewertungen
- Ch#4 Circuit Theorem - CompleteDokument73 SeitenCh#4 Circuit Theorem - CompleteUsman ArganNoch keine Bewertungen
- Theory PhysicsDokument41 SeitenTheory PhysicsKartik RaghuwanshiNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Guidelines For Global Strength Analysis of Multipurpose VesselsDokument60 SeitenGuidelines For Global Strength Analysis of Multipurpose VesselsAnwarul Shafiq AwalludinNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Training Report On 400 KvgssDokument21 SeitenTraining Report On 400 KvgssRitesh MeenaNoch keine Bewertungen
- Clem Waves Lesson02 PresentationDokument19 SeitenClem Waves Lesson02 PresentationSreedharachary Simhaa100% (3)
- Specification: Instruction ManualDokument4 SeitenSpecification: Instruction Manualmauro martinez reyesNoch keine Bewertungen
- Stranded Bare AWGDokument1 SeiteStranded Bare AWGgerrzen64Noch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Literature Review GroupDokument5 SeitenLiterature Review GroupGeraldJoelBillihNoch keine Bewertungen
- Project Report Rectangular Patch Antenna Design Pavan Kumar Akula 3.0Dokument13 SeitenProject Report Rectangular Patch Antenna Design Pavan Kumar Akula 3.0yaswanthNoch keine Bewertungen
- WebpdfDokument253 SeitenWebpdfErick Rodriguez100% (1)
- Impact of A Jet - Conservation of Linear MomentumDokument6 SeitenImpact of A Jet - Conservation of Linear MomentumRufus ChengNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- XHHW 2 PDFDokument2 SeitenXHHW 2 PDFNaveedNoch keine Bewertungen
- M, MKJDokument225 SeitenM, MKJmhNoch keine Bewertungen
- Refraction 2Dokument3 SeitenRefraction 2savannahk15Noch keine Bewertungen
- Physics 20 Dynamics Forces Unit PlanDokument4 SeitenPhysics 20 Dynamics Forces Unit Planapi-257672273Noch keine Bewertungen
- Rohit Kumar XII B PHYSICSDokument14 SeitenRohit Kumar XII B PHYSICSRKNoch keine Bewertungen
- Price List PL-02/2013 01-09-2013: Type Ratings Icu Icu Unit RateDokument7 SeitenPrice List PL-02/2013 01-09-2013: Type Ratings Icu Icu Unit RatepogisimpatikoNoch keine Bewertungen
- FUTA POst UTME Physics QuestionsDokument17 SeitenFUTA POst UTME Physics QuestionsRejoiceNoch keine Bewertungen
- Wind-Excited VibrationsDokument12 SeitenWind-Excited VibrationsGuilherme SalesNoch keine Bewertungen
- Shootin' Hoops LabDokument4 SeitenShootin' Hoops LabcodythecodemanNoch keine Bewertungen
- LAS-LESACA Math9 Wk2 Checked by Dela CruzDokument15 SeitenLAS-LESACA Math9 Wk2 Checked by Dela CruzJoan SilvaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Ba9054 PDFDokument4 SeitenBa9054 PDFEmmanuel Vieira VillasanaNoch keine Bewertungen
- PS7202-Flexible AC Transmission Systems PDFDokument5 SeitenPS7202-Flexible AC Transmission Systems PDF1balamanianNoch keine Bewertungen
- 2.1 Motion PDFDokument73 Seiten2.1 Motion PDFsanad boshehNoch keine Bewertungen
- Bearing Load CalculationDokument9 SeitenBearing Load CalculationitzpcsNoch keine Bewertungen