Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- PS Vita Year OneDokument33 SeitenPS Vita Year OnePatito0% (1)
- Amazon Interview HelpDokument3 SeitenAmazon Interview HelpPalashNoch keine Bewertungen
- Failure Modes and EffectFAILURE MODES AND EFFECTS ANALYSIS (FMEA) Analysis (Fmea)Dokument147 SeitenFailure Modes and EffectFAILURE MODES AND EFFECTS ANALYSIS (FMEA) Analysis (Fmea)최재호Noch keine Bewertungen
- Shape CognitionDokument6 SeitenShape CognitionnishamurugesanNoch keine Bewertungen
- Animal FlashcardsDokument7 SeitenAnimal FlashcardsnishamurugesanNoch keine Bewertungen
- Size Guide Mayoor Abu DhabiDokument3 SeitenSize Guide Mayoor Abu DhabinishamurugesanNoch keine Bewertungen
- High-Speed Low-Power Viterbi Decoder Design For TCM DecodersDokument5 SeitenHigh-Speed Low-Power Viterbi Decoder Design For TCM DecodersnishamurugesanNoch keine Bewertungen
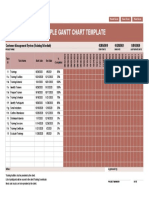
- Simple Gantt Chart Template - TemplateLabDokument1 SeiteSimple Gantt Chart Template - TemplateLabjparedesvillaltaNoch keine Bewertungen
- Answer - Key - Suraku Academy - CT DS - 301 - IIDokument6 SeitenAnswer - Key - Suraku Academy - CT DS - 301 - IIArjun BhargavaNoch keine Bewertungen
- Ad2s1210 EvalDokument20 SeitenAd2s1210 EvalSvv KarthikNoch keine Bewertungen
- Instructions For Using Capacity Worksheet: © Satish Thatte, Versionone: Agile Template Set, 3-June-2013Dokument4 SeitenInstructions For Using Capacity Worksheet: © Satish Thatte, Versionone: Agile Template Set, 3-June-2013ActiveNoch keine Bewertungen
- Designing Service Contracts: Creating A Service ContractDokument419 SeitenDesigning Service Contracts: Creating A Service ContractAnjinayulu AnjiNoch keine Bewertungen
- Developer PorttfolioDokument1 SeiteDeveloper PorttfolioBachelor Gaming CommunityNoch keine Bewertungen
- Traditional Problem With Cyber CrimeDokument10 SeitenTraditional Problem With Cyber CrimeSwati bhosleNoch keine Bewertungen
- NormalizationDokument36 SeitenNormalizationSmilie ChawlaNoch keine Bewertungen
- {\Rtf1\Ansi\Ansicpg1252\Deff0\Deflang1033\Deflangfe1033{\Fonttbl{\f0\Fswiss\Fprq2\ Fcharset0 Arial;}{\f1\Fnil\Fprq2\Fcharset2 Wingdings;}{\f2\Froman\Fprq2\Fcharset2 Symbol;}} {\*\Generator MsfteditDokument5 Seiten{\Rtf1\Ansi\Ansicpg1252\Deff0\Deflang1033\Deflangfe1033{\Fonttbl{\f0\Fswiss\Fprq2\ Fcharset0 Arial;}{\f1\Fnil\Fprq2\Fcharset2 Wingdings;}{\f2\Froman\Fprq2\Fcharset2 Symbol;}} {\*\Generator MsfteditimkassNoch keine Bewertungen
- Como Cuantificar El Riesgo Es CiberseguridadDokument15 SeitenComo Cuantificar El Riesgo Es CiberseguridadJose Miguel Iriarte NeiraNoch keine Bewertungen
- SEO Service-Progress-Milestone-1Dokument16 SeitenSEO Service-Progress-Milestone-1Laurensius KosasihNoch keine Bewertungen
- Vtu DSA Lab Manual Related Can Help YouDokument116 SeitenVtu DSA Lab Manual Related Can Help YouS Rachel ShaliniNoch keine Bewertungen
- Fi 7260 DatasheetDokument2 SeitenFi 7260 DatasheetDodi VenesiaNoch keine Bewertungen
- EmTech TG SportsDokument72 SeitenEmTech TG Sportswendyl nullaNoch keine Bewertungen
- Lucene RankingDokument13 SeitenLucene RankingGayane PetrosyanNoch keine Bewertungen
- COA Lecture 12 Microprogramming PDFDokument44 SeitenCOA Lecture 12 Microprogramming PDFA3 AashuNoch keine Bewertungen
- ReDokument3 SeitenReLoc NguyenNoch keine Bewertungen
- Profibus - DPDokument44 SeitenProfibus - DPEliseu Rodrigues PereiraNoch keine Bewertungen
- Switch On Book 7 - TMDokument65 SeitenSwitch On Book 7 - TMThe Promising High SchoolNoch keine Bewertungen
- FiletypeDokument13 SeitenFiletypeNeikos TenkoseiNoch keine Bewertungen
- Learn The New Office 365 Open and FPP - 020113Dokument78 SeitenLearn The New Office 365 Open and FPP - 020113Nelson JesusNoch keine Bewertungen
- Data Flow Diagrams CompleteDokument26 SeitenData Flow Diagrams CompleteSanjoy GhatakNoch keine Bewertungen
- Object-Oriented Software Engineering: Practical Software Development Using UML and JavaDokument20 SeitenObject-Oriented Software Engineering: Practical Software Development Using UML and JavaSatyam SaxenaNoch keine Bewertungen
- Project Planner Scheduler CAPM in Pittsburgh PA Resume George ChristyDokument2 SeitenProject Planner Scheduler CAPM in Pittsburgh PA Resume George ChristyGeorgeChristyNoch keine Bewertungen
- ChangelogDokument11 SeitenChangelogKaushikPaulNoch keine Bewertungen
- Glomax Discover and Explorer: State-Of-The-Art Multimode Readers For Luminescence, Fluorescence and Absorbance DetectionDokument14 SeitenGlomax Discover and Explorer: State-Of-The-Art Multimode Readers For Luminescence, Fluorescence and Absorbance DetectionDanielNoch keine Bewertungen
- No Nama Alat Spesifikasi JMLDokument11 SeitenNo Nama Alat Spesifikasi JMLImmanuel GetshoNoch keine Bewertungen