Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Absolutely Awesome Book On CSharp and .NET - TOCDokument6 SeitenAbsolutely Awesome Book On CSharp and .NET - TOCTrần Anh DũngNoch keine Bewertungen
- Transactional Licensing Comparison ChartDokument3 SeitenTransactional Licensing Comparison Chartjonder2000Noch keine Bewertungen
- CounterACT Console User Manual 7.0.0 PDFDokument763 SeitenCounterACT Console User Manual 7.0.0 PDFlazarusNoch keine Bewertungen
- Tobias LevkovichDokument21 SeitenTobias Levkovichapi-8861784Noch keine Bewertungen
- Support LogDokument55 SeitenSupport LogБарба РискаNoch keine Bewertungen
- Basic Computer Organization and Design Lecture OverviewDokument38 SeitenBasic Computer Organization and Design Lecture OverviewTaranvir KaurNoch keine Bewertungen
- SFIT Library Newsletter Vol 2 Issue 1Dokument11 SeitenSFIT Library Newsletter Vol 2 Issue 1sfitlibraryNoch keine Bewertungen
- MicroLog and MicroLog PRO User Guide 1E 1PDokument145 SeitenMicroLog and MicroLog PRO User Guide 1E 1PDaniel Taiti KimathiNoch keine Bewertungen
- Computer Processing of Human LanguageDokument2 SeitenComputer Processing of Human LanguageKym Algarme50% (2)
- Lecture MatlabDokument73 SeitenLecture Matlabn4arjun123Noch keine Bewertungen
- Mup LabDokument4 SeitenMup LabAbhishek SinghNoch keine Bewertungen
- Vishak RESUMEDokument2 SeitenVishak RESUMEVishakh VinodNoch keine Bewertungen
- Ahmad R PDFDokument8 SeitenAhmad R PDFMahesa RefadoNoch keine Bewertungen
- UsbFix ReportDokument10 SeitenUsbFix Reporttufan demirelNoch keine Bewertungen
- Oracle Apps Technical Interview Questions Answers GuideDokument7 SeitenOracle Apps Technical Interview Questions Answers GuideJohn StephensNoch keine Bewertungen
- Johnson's Algorithm For Optimal Scheduling Of Multi-Machine SystemsDokument8 SeitenJohnson's Algorithm For Optimal Scheduling Of Multi-Machine SystemsBabyCoder HvhNoch keine Bewertungen
- Java Foundations CourseDokument3 SeitenJava Foundations CourseJim DelgadoNoch keine Bewertungen
- Table Invalid Index DumpDokument9 SeitenTable Invalid Index DumpBac AstonNoch keine Bewertungen
- Introduction to Oracle Data IntegratorDokument14 SeitenIntroduction to Oracle Data IntegratorSuresh grNoch keine Bewertungen
- UE Requested Bearer Resource ModificationDokument3 SeitenUE Requested Bearer Resource Modificationcollinsg123Noch keine Bewertungen
- Dept CSIT12 Mar 19Dokument40 SeitenDept CSIT12 Mar 19Varrshini MadhavakannaNoch keine Bewertungen
- 1TNC911104M0205 MCUSetup User Guide (2016) - R5Dokument27 Seiten1TNC911104M0205 MCUSetup User Guide (2016) - R5Naseer HydenNoch keine Bewertungen
- 06 - Cisco Foundations - How Applications Speak - TCP and UDPDokument56 Seiten06 - Cisco Foundations - How Applications Speak - TCP and UDPomarptcNoch keine Bewertungen
- Viewshed Calculation AlgoDokument8 SeitenViewshed Calculation AlgoYasirNoch keine Bewertungen
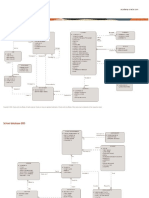
- PLSQL Schema ERD and Table DesignsDokument8 SeitenPLSQL Schema ERD and Table DesignsSoham GholapNoch keine Bewertungen
- International Regulations for Preventing Collisions at Sea, 1972Dokument21 SeitenInternational Regulations for Preventing Collisions at Sea, 1972VladimirNoch keine Bewertungen
- StatisticsMachineLearningPythonDraft PDFDokument319 SeitenStatisticsMachineLearningPythonDraft PDFgautam kumar100% (1)
- GRCDP00696190000029942Dokument2 SeitenGRCDP00696190000029942Gokul KrishnanNoch keine Bewertungen
- Properties of Trigonometric FunctionsDokument9 SeitenProperties of Trigonometric FunctionsMarie Carolaine FameroNoch keine Bewertungen
- Magic 3d Easy View Manual Es PDFDokument32 SeitenMagic 3d Easy View Manual Es PDFAngel Santiago Silva HuamalianoNoch keine Bewertungen