Das könnte Ihnen auch gefallen
- Nemo Handy-A 2.10 Manual PDFDokument172 SeitenNemo Handy-A 2.10 Manual PDFtunglamniitNoch keine Bewertungen
- Ueye Usb Manual 3.32Dokument226 SeitenUeye Usb Manual 3.32Róbert MarcNoch keine Bewertungen
- Nemo Handy-A 2.00 ManualDokument160 SeitenNemo Handy-A 2.00 ManualakkarapatNoch keine Bewertungen
- NSO-evo3S IM EN 988-12478-001 WDokument48 SeitenNSO-evo3S IM EN 988-12478-001 WMomed MdNoch keine Bewertungen
- User Manual Nemo Walker Air 1.20Dokument163 SeitenUser Manual Nemo Walker Air 1.20gvmariano100% (1)
- Nemo Handy-A 1.50 ManualDokument153 SeitenNemo Handy-A 1.50 ManualNguyễn Thế ĐạtNoch keine Bewertungen
- Nemo - Handy-A v2.30 - Manual PDFDokument197 SeitenNemo - Handy-A v2.30 - Manual PDFdawirNoch keine Bewertungen
- Everex Lm7we User ManualDokument122 SeitenEverex Lm7we User ManualGabriel CalijuriNoch keine Bewertungen
- Nemo Handy-A 2.10 ManualDokument172 SeitenNemo Handy-A 2.10 ManualNenadNoch keine Bewertungen
- Nemo Scanner Guide - July11Dokument119 SeitenNemo Scanner Guide - July11E_ClaveNoch keine Bewertungen
- AirLive WT-2000PCI ManualDokument35 SeitenAirLive WT-2000PCI Manualrino8Noch keine Bewertungen
- Ixc 2050 IrDokument20 SeitenIxc 2050 IrinfoNoch keine Bewertungen
- Operator Manual: NSS Evo3sDokument160 SeitenOperator Manual: NSS Evo3sseseNoch keine Bewertungen
- NVRalgarrobosDokument182 SeitenNVRalgarrobosLuis Eduardo Cepeda MayorgaNoch keine Bewertungen
- MRx18 - Minirepeater User ManualDokument23 SeitenMRx18 - Minirepeater User ManualJustinian BaraitaruNoch keine Bewertungen
- Yealink w56p User ManualDokument118 SeitenYealink w56p User ManualmasoodkamaliNoch keine Bewertungen
- Yealink W52P V73 - 27 User GuideDokument98 SeitenYealink W52P V73 - 27 User GuideAleksey MarmiloNoch keine Bewertungen
- Operation Guide: Ip Camera SeriesDokument65 SeitenOperation Guide: Ip Camera SeriesEligio LeivaNoch keine Bewertungen
- Rapid Eye Installation GuideDokument82 SeitenRapid Eye Installation GuideelgaenusNoch keine Bewertungen
- WLM54AP26Dokument35 SeitenWLM54AP26aurumstar2000Noch keine Bewertungen
- Nemo Handy-S 3.60 ManualDokument159 SeitenNemo Handy-S 3.60 ManualAmit Thakur75% (4)
- UD09050B Baseline User Manual of Network Video Recorder 7100NI V3.4.96 20180131Dokument158 SeitenUD09050B Baseline User Manual of Network Video Recorder 7100NI V3.4.96 20180131GustavoNoch keine Bewertungen
- User Manual of Turbo HD DVRDokument195 SeitenUser Manual of Turbo HD DVRViktor CorvinusNoch keine Bewertungen
- Nokia 6233 rm-145 Nokia 6234 rm-123 Service Manual-12 v1Dokument19 SeitenNokia 6233 rm-145 Nokia 6234 rm-123 Service Manual-12 v1Cris Daryl PasardozaNoch keine Bewertungen
- Quick Start Notel As 3408Dokument48 SeitenQuick Start Notel As 3408Ajay ChoudharyNoch keine Bewertungen
- Wavecom Usb Drivers InstallationDokument4 SeitenWavecom Usb Drivers InstallationAjit DashNoch keine Bewertungen
- BA_CP-1243-7-LTE_76Dokument132 SeitenBA_CP-1243-7-LTE_76Luk KosickiNoch keine Bewertungen
- Ba - CP 1243 7 Lte - 76Dokument154 SeitenBa - CP 1243 7 Lte - 76isaacsavioNoch keine Bewertungen
- 6131Dokument0 Seiten6131Juan CarlosNoch keine Bewertungen
- 5902 A320i A420i Product Manual English EDP002568 2Dokument0 Seiten5902 A320i A420i Product Manual English EDP002568 2Mario NM71% (7)
- 0 Uw 38 FP 7 Egcy 7 Yxdkgzrg 6 ZPJ 0 KyDokument490 Seiten0 Uw 38 FP 7 Egcy 7 Yxdkgzrg 6 ZPJ 0 KyАндрей ОлененкоNoch keine Bewertungen
- EM IPX 2100 - v1.0 PDFDokument102 SeitenEM IPX 2100 - v1.0 PDFEmanuel FranciscoNoch keine Bewertungen
- New Generation Service ManualDokument12 SeitenNew Generation Service ManualMatias YanzonNoch keine Bewertungen
- Quantum 140 NOE 771Dokument48 SeitenQuantum 140 NOE 771Bjj Carlos RodriguezNoch keine Bewertungen
- Dial-Up Networking Setup Guide 7.20 Mar14Dokument131 SeitenDial-Up Networking Setup Guide 7.20 Mar14Penta MaxNoch keine Bewertungen
- NV10 USB Manual IntroductionDokument8 SeitenNV10 USB Manual IntroductionApple Pie0% (1)
- UD09493B_Baseline_User_Manual_of_iDS-96_6700NXI-I_4F_Network_Video_Recorder_V4.1.10_20180316Dokument208 SeitenUD09493B_Baseline_User_Manual_of_iDS-96_6700NXI-I_4F_Network_Video_Recorder_V4.1.10_20180316soportemtoredesNoch keine Bewertungen
- Nokia c7-00 Rm-675 Rm-691 Service Manual-12 v6Dokument32 SeitenNokia c7-00 Rm-675 Rm-691 Service Manual-12 v6sasquatch69Noch keine Bewertungen
- DS-3E0105P-E/DS-3E0109P-E: User ManualDokument19 SeitenDS-3E0105P-E/DS-3E0109P-E: User ManualMichael LopezNoch keine Bewertungen
- User Manual of Network Video Recorder - 71-E (M) PDFDokument197 SeitenUser Manual of Network Video Recorder - 71-E (M) PDFwaqas aliNoch keine Bewertungen
- 2015 June Manual Instruction For Hikvision NVR Network Set UpDokument225 Seiten2015 June Manual Instruction For Hikvision NVR Network Set UpMëñghëñg ŁïmNoch keine Bewertungen
- 1 - ST - iPECS eMG80 IM - 1 - 4 - sw2 - 1Dokument114 Seiten1 - ST - iPECS eMG80 IM - 1 - 4 - sw2 - 1adyta_roNoch keine Bewertungen
- XPIC and Allignment 2008Dokument127 SeitenXPIC and Allignment 2008Anonymous SuO1HHNoch keine Bewertungen
- Net App DiagDokument481 SeitenNet App DiagSteve ForsterNoch keine Bewertungen
- ACT IR2002UL IR4002US Manual v1.0.4 110512Dokument28 SeitenACT IR2002UL IR4002US Manual v1.0.4 110512RADU8989Noch keine Bewertungen
- ServoStar CD - Hardware Installation ManualDokument118 SeitenServoStar CD - Hardware Installation Manualyonan RodriguezNoch keine Bewertungen
- Network Video Recorder: User ManualDokument122 SeitenNetwork Video Recorder: User ManualVinitNoch keine Bewertungen
- Network Video Recorder: User ManualDokument133 SeitenNetwork Video Recorder: User ManualCesar MirabetyNoch keine Bewertungen
- HBIsl 0508 en en-USDokument632 SeitenHBIsl 0508 en en-USNGUYEN HUU DAONoch keine Bewertungen
- Nemo Outdoor 7.50: Product DescriptionDokument30 SeitenNemo Outdoor 7.50: Product Descriptionامين بوعزيزNoch keine Bewertungen
- NSS IM EN 988-10107-003 WDokument66 SeitenNSS IM EN 988-10107-003 WCarlos CerveraNoch keine Bewertungen
- Prosilica GT - QuickStart GuideDokument230 SeitenProsilica GT - QuickStart Guidenijoti5317Noch keine Bewertungen
- EZ9 Series HMI ManualDokument34 SeitenEZ9 Series HMI ManualDanielito AlvaracinNoch keine Bewertungen
- Manual UX400 - 10GDokument209 SeitenManual UX400 - 10GelyorkmasNoch keine Bewertungen
- User'S Guide: Easycoder Pf4I Bar Code Label PrinterDokument164 SeitenUser'S Guide: Easycoder Pf4I Bar Code Label PrinterNúi SôngNoch keine Bewertungen
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusVon EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNoch keine Bewertungen
- Data Acquisition from HD Vehicles Using J1939 CAN BusVon EverandData Acquisition from HD Vehicles Using J1939 CAN BusNoch keine Bewertungen
- Safe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsVon EverandSafe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsNoch keine Bewertungen
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneVon EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNoch keine Bewertungen
- Manual Digi Encoder E5n-D0360-5m0mcDokument17 SeitenManual Digi Encoder E5n-D0360-5m0mcAlejandra PadillaNoch keine Bewertungen
- Acer Aspire 4738G (Quanta ZQ9) Laptop SchematicsDokument35 SeitenAcer Aspire 4738G (Quanta ZQ9) Laptop SchematicsCempli BranomNoch keine Bewertungen
- AK668E+Q7 ManualDokument106 SeitenAK668E+Q7 ManualEver J BC75% (8)
- Multimedia & CGDokument59 SeitenMultimedia & CGSharu KhemNoch keine Bewertungen
- II B. Tech Signals and Systems Exam QuestionsDokument8 SeitenII B. Tech Signals and Systems Exam QuestionsbharadwajNoch keine Bewertungen
- Wevj 08 00327 PDFDokument12 SeitenWevj 08 00327 PDFsatyavartguptaNoch keine Bewertungen
- Speed Control of Three Phase Induction MotorDokument28 SeitenSpeed Control of Three Phase Induction MotorRajeev Valunjkar100% (1)
- Introduction To AndroidDokument27 SeitenIntroduction To AndroidSeemalNoch keine Bewertungen
- Farmpacker 200FPX Manual-CDokument177 SeitenFarmpacker 200FPX Manual-CElvio Alvitez TandaypanNoch keine Bewertungen
- E - Catalogue - 24-9-2014Dokument19 SeitenE - Catalogue - 24-9-2014Juan MontufarNoch keine Bewertungen
- Construction of Automatic Door Bell System With The Object DetectionDokument3 SeitenConstruction of Automatic Door Bell System With The Object DetectionSurendra Yadav100% (1)
- CH 2 Essential Chemistry For BiologyDokument53 SeitenCH 2 Essential Chemistry For BiologyStalyn Tejada HernandezNoch keine Bewertungen
- Relay GE Multilin f650Dokument10 SeitenRelay GE Multilin f650Singgih PrayogoNoch keine Bewertungen
- Nautoplex SeriesDokument4 SeitenNautoplex Seriesdony prabuNoch keine Bewertungen
- 3G WhitepaperDokument7 Seiten3G WhitepaperdeeptisomaniNoch keine Bewertungen
- Inside A DELL D610 Battery ..Dokument5 SeitenInside A DELL D610 Battery ..Srdjan BNoch keine Bewertungen
- Vn-541pc Basic Manual MultiDokument136 SeitenVn-541pc Basic Manual MultiRD MediaNoch keine Bewertungen
- Earthing SystemdesignDokument32 SeitenEarthing Systemdesignlrpatra100% (1)
- Belt Tension Checking Tool Use1Dokument14 SeitenBelt Tension Checking Tool Use1JohnnoNoch keine Bewertungen
- Dx35 Mid Range Distance Sensors: Larger Than Life Performance - Flexible Measurement and Detection Up To 35 MDokument20 SeitenDx35 Mid Range Distance Sensors: Larger Than Life Performance - Flexible Measurement and Detection Up To 35 MSergio Alejandro MartinezNoch keine Bewertungen
- Gree Electric Appliances Inc. of ZhuhaiDokument42 SeitenGree Electric Appliances Inc. of ZhuhaiLeonardo JovanovskiNoch keine Bewertungen
- 2023 PG SubstationEquipment-eDokument2 Seiten2023 PG SubstationEquipment-eUsman KhanNoch keine Bewertungen
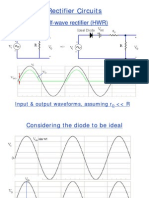
- Rectifier Circuits: Half-Wave Rectifier (HWR)Dokument18 SeitenRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNoch keine Bewertungen
- Tubes Vs TransistorsDokument18 SeitenTubes Vs TransistorsamapandahukiNoch keine Bewertungen
- Electrochemical Machining Nov16th2010Dokument47 SeitenElectrochemical Machining Nov16th2010rajdrklNoch keine Bewertungen
- Standart Operation Procedure Panel Soft StarterDokument2 SeitenStandart Operation Procedure Panel Soft Starterela elsatriaNoch keine Bewertungen
- Daily DigestDokument2 SeitenDaily DigesttechsmartNoch keine Bewertungen
- Summer Internship Report 1Dokument35 SeitenSummer Internship Report 1Hitesh Ahuja0% (1)
- Is - 4889 - 1968Dokument26 SeitenIs - 4889 - 1968sangitaghaisasNoch keine Bewertungen
- REF Stabilizing Resistor CalculationsDokument8 SeitenREF Stabilizing Resistor CalculationsmaheshNoch keine Bewertungen