Das könnte Ihnen auch gefallen
- System Linear and Non-Linear: Experiment No. 4Dokument7 SeitenSystem Linear and Non-Linear: Experiment No. 4Robin ScherbatskyNoch keine Bewertungen
- Introduction To DSP ProcessorsDokument9 SeitenIntroduction To DSP ProcessorssantoshNoch keine Bewertungen
- Advanced Mechatronics Systems - Laboratory - Mechatronics Control Systems - 1st EdDokument186 SeitenAdvanced Mechatronics Systems - Laboratory - Mechatronics Control Systems - 1st EdJose PradoNoch keine Bewertungen
- Chapter 9: Applications of The DFT: Impulse Response or Impulse Response FunctionDokument2 SeitenChapter 9: Applications of The DFT: Impulse Response or Impulse Response FunctionPremanand SubramaniNoch keine Bewertungen
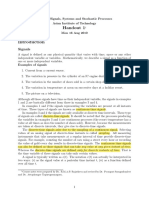
- Handout 1: SignalsDokument12 SeitenHandout 1: SignalsBryan YaranonNoch keine Bewertungen
- FinalDokument78 SeitenFinalsameera0627Noch keine Bewertungen
- ConvolutionDokument17 SeitenConvolutionআব্দুল্লাহ আল ইমরানNoch keine Bewertungen
- Impulse Response: Mathematical ConsiderationsDokument4 SeitenImpulse Response: Mathematical ConsiderationsAndrea SpencerNoch keine Bewertungen
- Block Diagram Representation of A Simple Electronic System: Main DefinitionsDokument9 SeitenBlock Diagram Representation of A Simple Electronic System: Main DefinitionsCansu ElizadeNoch keine Bewertungen
- Dynamic Charactertics PDF ModiDokument16 SeitenDynamic Charactertics PDF Modi21UME003 TUSHAR DEBNoch keine Bewertungen
- Signals and SystemsDokument67 SeitenSignals and Systemsyadagiri devarakondaNoch keine Bewertungen
- Module 1: Signals in Natural Domain Lecture 3: Description of Systems ObjectivesDokument3 SeitenModule 1: Signals in Natural Domain Lecture 3: Description of Systems Objectivesvizay237_430788222Noch keine Bewertungen
- Tutorials in SystemsDokument28 SeitenTutorials in SystemsAbdullah Al AsikNoch keine Bewertungen
- Impulse Response:: δ (t) δ (n) h (t) h (n)Dokument3 SeitenImpulse Response:: δ (t) δ (n) h (t) h (n)nazmulNoch keine Bewertungen
- Stable System:: Bilinear TransformDokument7 SeitenStable System:: Bilinear TransformSulaimanNoch keine Bewertungen
- Signal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDokument4 SeitenSignal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDarren GegantinoNoch keine Bewertungen
- Electronic SystemsDokument4 SeitenElectronic SystemsKram YnarNoch keine Bewertungen
- Mechatronica 1 ElectronicsDokument62 SeitenMechatronica 1 ElectronicsHahhaah BbbNoch keine Bewertungen
- But The Goal of Any Electrical or Electronic Control System Is To MeasureDokument8 SeitenBut The Goal of Any Electrical or Electronic Control System Is To MeasureavenashaNoch keine Bewertungen
- Rise Time 3dB Bandwidth Relationship Lab FactDokument26 SeitenRise Time 3dB Bandwidth Relationship Lab Factvotasugs756Noch keine Bewertungen
- Oic751-Transducer Engineering 2 Marks, 13 Marks and ProblemDokument41 SeitenOic751-Transducer Engineering 2 Marks, 13 Marks and ProblemPoovarasan SNoch keine Bewertungen
- Frequency Response: Adding Citations To Reliable SourcesDokument1 SeiteFrequency Response: Adding Citations To Reliable SourcesracNoch keine Bewertungen
- Lecture SensoricsDokument91 SeitenLecture SensoricsUlfan İbrhmvNoch keine Bewertungen
- Sensors and TransducersDokument59 SeitenSensors and TransducersnewworldosemwegieNoch keine Bewertungen
- CS Two MarksDokument7 SeitenCS Two MarkssivaeinfoNoch keine Bewertungen
- Logarithmic CompandingDokument20 SeitenLogarithmic CompandingSanthosh KrishnaNoch keine Bewertungen
- Comparing Magnitudes of Some Variables With A Standard ValueDokument8 SeitenComparing Magnitudes of Some Variables With A Standard Valueenok henaNoch keine Bewertungen
- EEET2486 Laboratory2 Guide S2 2020-1Dokument13 SeitenEEET2486 Laboratory2 Guide S2 2020-1Nam DinhNoch keine Bewertungen
- Laboratory 3 Digital Filter DesignDokument8 SeitenLaboratory 3 Digital Filter DesignModitha LakshanNoch keine Bewertungen
- Closed Loop Block DiagramDokument9 SeitenClosed Loop Block Diagramspj99696649148Noch keine Bewertungen
- Tearm Paper of Signal & SystemDokument22 SeitenTearm Paper of Signal & SystemHarendra86Noch keine Bewertungen
- DSP DR P VenkatesanDokument120 SeitenDSP DR P VenkatesandineshNoch keine Bewertungen
- Signals and SystemsDokument72 SeitenSignals and Systemsajas777BNoch keine Bewertungen
- Ece3101l Lab5 Sampling and ReconstructionDokument5 SeitenEce3101l Lab5 Sampling and ReconstructionGhostFTW gamingNoch keine Bewertungen
- Closed-Loop Systems: SystemDokument9 SeitenClosed-Loop Systems: SystemBhimsen ShresthaNoch keine Bewertungen
- Signals and Systems Is An Aspect of Electrical Engineering That Applies Mathematical Concepts To The Creation of Product DesignDokument9 SeitenSignals and Systems Is An Aspect of Electrical Engineering That Applies Mathematical Concepts To The Creation of Product Designnida batoolNoch keine Bewertungen
- Digital Control System - Lecture 2Dokument21 SeitenDigital Control System - Lecture 2adityarajput2928Noch keine Bewertungen
- Chapter OneDokument12 SeitenChapter OneMengistu BirukeNoch keine Bewertungen
- Signal and System-1Dokument7 SeitenSignal and System-1sushovan chandraNoch keine Bewertungen
- Notes On Micro Controller and Digital Signal ProcessingDokument70 SeitenNotes On Micro Controller and Digital Signal ProcessingDibyajyoti BiswasNoch keine Bewertungen
- Signals and Systems: Presented ByDokument12 SeitenSignals and Systems: Presented ByANITA BISWASNoch keine Bewertungen
- Control SystemDokument11 SeitenControl Systembalaji1986Noch keine Bewertungen
- 3 Chapter BMSPDokument41 Seiten3 Chapter BMSPSravani KumariNoch keine Bewertungen
- DSP Important MaterialDokument209 SeitenDSP Important Materialssabinayaa12Noch keine Bewertungen
- Signals and SystemsDokument13 SeitenSignals and Systemslg900df5063Noch keine Bewertungen
- Digital Control Systems Unit IDokument18 SeitenDigital Control Systems Unit Iyanith kumarNoch keine Bewertungen
- Midterm ReviewDokument24 SeitenMidterm ReviewwsovwNoch keine Bewertungen
- 2-Sensors and TransducersDokument68 Seiten2-Sensors and Transducersteklaykibrom3Noch keine Bewertungen
- Chapter 2 Discrete Data Control SystemsDokument78 SeitenChapter 2 Discrete Data Control SystemsAmruth ThelkarNoch keine Bewertungen
- Accurate Calculation of Harmonics/Inter-Harmonics of Time Varying LoadDokument4 SeitenAccurate Calculation of Harmonics/Inter-Harmonics of Time Varying LoadIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNoch keine Bewertungen
- Experiment 4 Sampling and Reconstruction of Continuous Time Signals Interpolation and DecimationDokument19 SeitenExperiment 4 Sampling and Reconstruction of Continuous Time Signals Interpolation and DecimationGpNoch keine Bewertungen
- SensorsDokument8 SeitenSensorsAkshayan RNoch keine Bewertungen
- Control System Viva QuestionDokument13 SeitenControl System Viva QuestionMasudur RahmanNoch keine Bewertungen
- Simulink Basics TutorialDokument143 SeitenSimulink Basics TutorialHiếu HuỳnhNoch keine Bewertungen
- Wavelets: 1. What Is Wavelet CompressionDokument9 SeitenWavelets: 1. What Is Wavelet CompressionDeepna KhattriNoch keine Bewertungen
- Instrumentation (Chapter 2)Dokument7 SeitenInstrumentation (Chapter 2)Yab TadNoch keine Bewertungen
- Cals RismanDokument5 SeitenCals RismanRisman YusufNoch keine Bewertungen
- Analogue Communication 1Dokument69 SeitenAnalogue Communication 1Malu SakthiNoch keine Bewertungen
- Signal ProcessingDokument16 SeitenSignal ProcessingSatish SirikondaNoch keine Bewertungen
- BitLocker 磁碟機加密修復金鑰Dokument1 SeiteBitLocker 磁碟機加密修復金鑰AppleWangAceNoch keine Bewertungen
- U U J I I: Homework #1 Solutions For The Course of Photonics EngineeringDokument1 SeiteU U J I I: Homework #1 Solutions For The Course of Photonics EngineeringAppleWangAceNoch keine Bewertungen
- Notebook Mobile 4. 5. 6Dokument2 SeitenNotebook Mobile 4. 5. 6AppleWangAceNoch keine Bewertungen
- Chapter OneDokument3 SeitenChapter OneAppleWangAceNoch keine Bewertungen
- ReportDokument29 SeitenReportAppleWangAceNoch keine Bewertungen
- Airy RingDokument5 SeitenAiry RingAppleWangAceNoch keine Bewertungen
- Chapter OneDokument3 SeitenChapter OneAppleWangAceNoch keine Bewertungen
- Channel Separation (HWECG 1)Dokument7 SeitenChannel Separation (HWECG 1)AppleWangAceNoch keine Bewertungen
- Multimedia Audio Processing and Practice Homework-1Dokument1 SeiteMultimedia Audio Processing and Practice Homework-1AppleWangAceNoch keine Bewertungen
- Biomedical Signal Processing Practice: R peak detection (HWECG-3) B9802222 李鎮廷 M10107952 杜鴻業 M10102148 王奕能Dokument6 SeitenBiomedical Signal Processing Practice: R peak detection (HWECG-3) B9802222 李鎮廷 M10107952 杜鴻業 M10102148 王奕能AppleWangAceNoch keine Bewertungen
- Turbulence Signal Detection Using Spiral Microphone ArrayDokument3 SeitenTurbulence Signal Detection Using Spiral Microphone ArrayAppleWangAceNoch keine Bewertungen
- S13 Comp PhotoDokument2 SeitenS13 Comp PhotoAppleWangAceNoch keine Bewertungen
- 作業Dokument1 Seite作業AppleWangAceNoch keine Bewertungen
- Turbulence Signal Detection Using Spiral Microphone ArrayDokument5 SeitenTurbulence Signal Detection Using Spiral Microphone ArrayB9702122Noch keine Bewertungen
- 4.2.1 Scattering and Interference - by - SantanaDokument29 Seiten4.2.1 Scattering and Interference - by - SantanaAppleWangAceNoch keine Bewertungen
- Ansoft HFSS - Technical Notes Topics: Technical NotesDokument62 SeitenAnsoft HFSS - Technical Notes Topics: Technical NotesAppleWangAceNoch keine Bewertungen
- 3實習Dokument1 Seite3實習AppleWangAceNoch keine Bewertungen
- HET312 NotesDokument41 SeitenHET312 NotesTing SamuelNoch keine Bewertungen
- Electronics & Telecommunication Engineering - Ies (Paper - I)Dokument4 SeitenElectronics & Telecommunication Engineering - Ies (Paper - I)Archana TripathiNoch keine Bewertungen
- Quantum: Digital Sensor OptionDokument1 SeiteQuantum: Digital Sensor OptionGerardo EsparzaNoch keine Bewertungen
- Dig ExcDokument9 SeitenDig Excpichet_krongyart2859Noch keine Bewertungen
- Analog and Digital Electronics Lab ReportDokument7 SeitenAnalog and Digital Electronics Lab ReportBilal BajwaNoch keine Bewertungen
- Module 1: Transfer Functions and Frequency ResponsesDokument49 SeitenModule 1: Transfer Functions and Frequency ResponsesAdil AbouelhassanNoch keine Bewertungen
- FM Receiver FPGADokument76 SeitenFM Receiver FPGAAndre HuiNoch keine Bewertungen
- Adobe Scan Nov 30, 2022Dokument5 SeitenAdobe Scan Nov 30, 2022Mohit soniNoch keine Bewertungen
- Eventide 1980Dokument17 SeitenEventide 1980JOSE COCA GARCIANoch keine Bewertungen
- Dolby 5.1 Channel Music Production GuidelinesDokument47 SeitenDolby 5.1 Channel Music Production GuidelinesThe Almighty SoundNoch keine Bewertungen
- What Is A Frequency Response Function (FRF) - Siemens PLM CommunityDokument17 SeitenWhat Is A Frequency Response Function (FRF) - Siemens PLM Communitysukhabhukha987Noch keine Bewertungen
- Manual-Spectrum Analyzer Arinst SSA-TG R2-EnGDokument74 SeitenManual-Spectrum Analyzer Arinst SSA-TG R2-EnGrobNoch keine Bewertungen
- Randall - Experimental Modal Analysis and Dynamic Component SynthesisDokument136 SeitenRandall - Experimental Modal Analysis and Dynamic Component Synthesiskiran2381Noch keine Bewertungen
- Rewv5 HelpDokument154 SeitenRewv5 HelpIsrael JoneNoch keine Bewertungen
- GATE-2009 Question Paper & Answer KeysDokument20 SeitenGATE-2009 Question Paper & Answer KeysP Praveen KumarNoch keine Bewertungen
- HPCLDokument6 SeitenHPCLraghu sandilyaNoch keine Bewertungen
- Equivalent Series Resistance of An LDO RegulatorDokument4 SeitenEquivalent Series Resistance of An LDO RegulatorΜαρια ΡοδακοπουλουNoch keine Bewertungen
- Metron Safety Analyzer QA - 90 - Service User ManualDokument112 SeitenMetron Safety Analyzer QA - 90 - Service User Manualzorgglub0% (1)
- 8553 Service PDFDokument231 Seiten8553 Service PDFAndrás SzabóNoch keine Bewertungen
- Signal and System-1Dokument7 SeitenSignal and System-1sushovan chandraNoch keine Bewertungen
- F000527 Montarbo EarthPro 115A Datasheet ENG 2019-06-07Dokument2 SeitenF000527 Montarbo EarthPro 115A Datasheet ENG 2019-06-07BO MahjoupNoch keine Bewertungen
- TOA-Audio Solutions For Mass Notification SystemsDokument14 SeitenTOA-Audio Solutions For Mass Notification Systemsahmadgce04Noch keine Bewertungen
- 3500-45 Position Monitor Datasheet - 141537Dokument21 Seiten3500-45 Position Monitor Datasheet - 141537Mahesh Kumbhar100% (1)
- Webinar # 3: Power System Stabilizer (PSS) TuningDokument24 SeitenWebinar # 3: Power System Stabilizer (PSS) TuningVigneshwaran KandaswamyNoch keine Bewertungen
- CatalogDokument20 SeitenCatalogJose Gregorio Ortega Carrillo100% (1)
- Sushi Sensor Rd-Te-R06101-003 PDFDokument4 SeitenSushi Sensor Rd-Te-R06101-003 PDFRiki HermansyahNoch keine Bewertungen
- FundCtrlSys Chapter3Dokument99 SeitenFundCtrlSys Chapter3Đỗ Ngọc CẩnNoch keine Bewertungen
- Section 7 Frequency Response AnalysisDokument113 SeitenSection 7 Frequency Response AnalysisNgô Minh KhánhNoch keine Bewertungen
- Bai Tap Dieu Khien Chuyen Dong Chuong 1-2Dokument15 SeitenBai Tap Dieu Khien Chuyen Dong Chuong 1-2Hieu LamNoch keine Bewertungen
- Op-Amp AC CharacteristicsDokument7 SeitenOp-Amp AC CharacteristicsVictor Leonardo Baron CastrilloNoch keine Bewertungen