Das könnte Ihnen auch gefallen
- Modélisation Cinématique Des MécanismesDokument8 SeitenModélisation Cinématique Des MécanismesConception & Fabrication MécaniqueNoch keine Bewertungen
- 12 - Modélisation Cinématique Des MécanismesDokument25 Seiten12 - Modélisation Cinématique Des MécanismesManal El Matmour M'hairNoch keine Bewertungen
- RobInd Ch2p1Dokument31 SeitenRobInd Ch2p1AYOUB EL MOUTTAQINoch keine Bewertungen
- Modélisation Géométrique Des LiaisonsDokument12 SeitenModélisation Géométrique Des LiaisonsKarima HamdanNoch keine Bewertungen
- Cours N3Dokument30 SeitenCours N3ni komekNoch keine Bewertungen
- 1 - TD13 Cinématique Schémas CinématiquesDokument6 Seiten1 - TD13 Cinématique Schémas CinématiquesCorentin ProdNoch keine Bewertungen
- Schéma CinématiqueDokument41 SeitenSchéma CinématiquesadikiNoch keine Bewertungen
- Liaisons 2Dokument8 SeitenLiaisons 2BIOS_012100% (1)
- Livre RDM ExtraDokument125 SeitenLivre RDM ExtraGhassane Said OuazriNoch keine Bewertungen
- Les Liaisons MécaniquesDokument6 SeitenLes Liaisons Mécaniquesabdelhi74100% (2)
- P8-3-Mecanique Du Solide PDFDokument9 SeitenP8-3-Mecanique Du Solide PDFDamien MirandaNoch keine Bewertungen
- 6 Schematisation PDFDokument10 Seiten6 Schematisation PDFHanane TounsiNoch keine Bewertungen
- ISOSTATISMEDokument6 SeitenISOSTATISMEmaraghni_hassine7592Noch keine Bewertungen
- Chapitre1 - Liaisons MécaniquesDokument9 SeitenChapitre1 - Liaisons MécaniquesZakaria BaidNoch keine Bewertungen
- Chapitre1 - Liaisons MécaniquesDokument9 SeitenChapitre1 - Liaisons MécaniquesZakaria BaidNoch keine Bewertungen
- 07-Rep SchematisationDokument10 Seiten07-Rep SchematisationBouHouchNoch keine Bewertungen
- ISOSTATISMEDokument6 SeitenISOSTATISMESam DallaliNoch keine Bewertungen
- CH 2 - Init-Rob2Dokument36 SeitenCH 2 - Init-Rob2hamza gaceurNoch keine Bewertungen
- Modélisation Des Systèmes de SolidesDokument17 SeitenModélisation Des Systèmes de SolidesAbdelali YacoubiNoch keine Bewertungen
- Chapitre 1 Mecanique Des SolidesDokument13 SeitenChapitre 1 Mecanique Des SolidesMohamed KrichenNoch keine Bewertungen
- Cours Insa 2a 2Dokument7 SeitenCours Insa 2a 2Nadia DridiNoch keine Bewertungen
- Cours Modèl Liaison AjustementsDokument70 SeitenCours Modèl Liaison AjustementssawadogoNoch keine Bewertungen
- Liaisons TableauDokument1 SeiteLiaisons Tableaubhsbhs19Noch keine Bewertungen
- Chapitre 4 CinematiqueDokument19 SeitenChapitre 4 CinematiqueAbeka Kader100% (1)
- Liaison (Mécanique)Dokument10 SeitenLiaison (Mécanique)kadri jamilNoch keine Bewertungen
- Théorie Des Mécanismes L3Dokument15 SeitenThéorie Des Mécanismes L3Shake SpeareNoch keine Bewertungen
- Composantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesDokument12 SeitenComposantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesweslatisfirNoch keine Bewertungen
- TDM LiaisonsDokument22 SeitenTDM LiaisonsKooraNow HDNoch keine Bewertungen
- ÉlémentDokument8 SeitenÉlémentAnonymous jmFTK5TNoch keine Bewertungen
- Construction MécaniqueDokument250 SeitenConstruction MécaniqueSimo MabrouukNoch keine Bewertungen
- Chap2 Liaisons Solides VAS2 Potel Gatignol PDFDokument11 SeitenChap2 Liaisons Solides VAS2 Potel Gatignol PDFDamien MirandaNoch keine Bewertungen
- Tableau LiaisonsDokument1 SeiteTableau LiaisonsKamalMousserNoch keine Bewertungen
- Chapitre 2Dokument8 SeitenChapitre 2rami elloniNoch keine Bewertungen
- Chapitre 2 - Liaison Et Assemblage MécaniquesDokument11 SeitenChapitre 2 - Liaison Et Assemblage MécaniquesFréjus abimbolaNoch keine Bewertungen
- Cours Éléments de Construction 2020-21Dokument84 SeitenCours Éléments de Construction 2020-21Hassan BoufkerNoch keine Bewertungen
- Cinématique Du Solide IndéformableDokument15 SeitenCinématique Du Solide IndéformableLarbi Elbakkali100% (2)
- Representation Des ProduitsDokument12 SeitenRepresentation Des ProduitsHAJAR HAFIDNoch keine Bewertungen
- Cours Et Exercice RDMDokument112 SeitenCours Et Exercice RDMYassinDZ100% (11)
- Calcul Des Structures HyperstatiquesDokument240 SeitenCalcul Des Structures Hyperstatiqueslimmoud100% (2)
- CH11-Cours Liaisons Et Schématisation - ÉleveDokument7 SeitenCH11-Cours Liaisons Et Schématisation - Élevephotomontage636Noch keine Bewertungen
- Chapitre 4Dokument35 SeitenChapitre 4CHiZORI 19Noch keine Bewertungen
- TD 1 MA 2020 VFaDokument8 SeitenTD 1 MA 2020 VFaMohamed FoudalNoch keine Bewertungen
- TD de SI - MécaniqueDokument3 SeitenTD de SI - MécaniqueArthur TigreatNoch keine Bewertungen
- MIP PRDokument6 SeitenMIP PRSamira KrimiNoch keine Bewertungen
- CI 8-Cours Liaisons Schema Cine ÉlèveDokument7 SeitenCI 8-Cours Liaisons Schema Cine ÉlèveSamba SallNoch keine Bewertungen
- Mecanique Du SolideDokument129 SeitenMecanique Du SolideSîdïMôhâmèdBën100% (1)
- TD Cinématique CHARIOT FILOGUIDEDokument4 SeitenTD Cinématique CHARIOT FILOGUIDELamia Achour Ep Zanned100% (3)
- SchematisationDokument10 SeitenSchematisationAbdelKarim dergoulNoch keine Bewertungen
- Liaisons Mécaniques - 2022Dokument2 SeitenLiaisons Mécaniques - 2022Mohsen LaabidiNoch keine Bewertungen
- c1 Cours Liaisons MecaniquesDokument4 Seitenc1 Cours Liaisons Mecaniqueshsn frkNoch keine Bewertungen
- Chapitre 2 MODELISATION DES LIAISONSDokument15 SeitenChapitre 2 MODELISATION DES LIAISONSChaker Chaoual100% (1)
- Composantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesDokument12 SeitenComposantes Des Competences Disciplinaires: Theme: Typologie Des AssemblagesntayoubNoch keine Bewertungen
- Lasers: Les Grands Articles d'UniversalisVon EverandLasers: Les Grands Articles d'UniversalisNoch keine Bewertungen
- Relativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueVon EverandRelativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueNoch keine Bewertungen
- Stéréochimie organique: Les Grands Articles d'UniversalisVon EverandStéréochimie organique: Les Grands Articles d'UniversalisNoch keine Bewertungen
- BV ExDokument4 SeitenBV ExAbderrazak MiassarNoch keine Bewertungen
- Bac S Sciences de L Ingenieur Si Nouvelle Caledonie 2009 SujetDokument34 SeitenBac S Sciences de L Ingenieur Si Nouvelle Caledonie 2009 SujetAbderrazak MiassarNoch keine Bewertungen
- Pieuvre Fonctionnelle3Dokument1 SeitePieuvre Fonctionnelle3Abderrazak MiassarNoch keine Bewertungen
- Prep Brevet Pousse SeringueDokument3 SeitenPrep Brevet Pousse SeringueAbderrazak MiassarNoch keine Bewertungen
- Dessin D Ensemble Reducteur Limiteur de Couple CouleurDokument1 SeiteDessin D Ensemble Reducteur Limiteur de Couple CouleurAbderrazak MiassarNoch keine Bewertungen
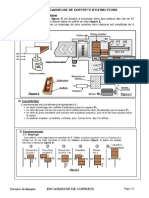
- Devoir de Synthèse N°2 Avec Correction - Génie Mécanique - Encaisseuse de Coffrets D'extincteurs - Bac Technique (2019-2020) MR MUSTAPHA BEN AMMARDokument5 SeitenDevoir de Synthèse N°2 Avec Correction - Génie Mécanique - Encaisseuse de Coffrets D'extincteurs - Bac Technique (2019-2020) MR MUSTAPHA BEN AMMARAbderrazak MiassarNoch keine Bewertungen
- F121 Organ Fil Cotation FoncDokument2 SeitenF121 Organ Fil Cotation FoncAbderrazak MiassarNoch keine Bewertungen
- TD N°5 Exos ComplémentairesDokument4 SeitenTD N°5 Exos ComplémentairesAbderrazak MiassarNoch keine Bewertungen
- Parametre Lies MotifDokument2 SeitenParametre Lies MotifAbderrazak MiassarNoch keine Bewertungen
- Essuie TP21A2 1Dokument3 SeitenEssuie TP21A2 1Abderrazak MiassarNoch keine Bewertungen
- Le Fraisage en RoulantDokument13 SeitenLe Fraisage en RoulantAbderrazak MiassarNoch keine Bewertungen
- Rattrapage BAC 2019 Sciences de Lingénieur STMDokument11 SeitenRattrapage BAC 2019 Sciences de Lingénieur STMAbderrazak MiassarNoch keine Bewertungen
- Les Définitions Des Principales Opérations de TournageDokument9 SeitenLes Définitions Des Principales Opérations de TournageAbderrazak MiassarNoch keine Bewertungen
- Étude de Quelques Temps TechnologiquesDokument5 SeitenÉtude de Quelques Temps TechnologiquesAbderrazak MiassarNoch keine Bewertungen
- Unité de Bouchonnage de FlaconsDokument4 SeitenUnité de Bouchonnage de FlaconsAbderrazak MiassarNoch keine Bewertungen
- Vocabulaire Technique Des Formes - Sciences de L'ingénieurDokument3 SeitenVocabulaire Technique Des Formes - Sciences de L'ingénieurAbderrazak MiassarNoch keine Bewertungen
- La Rectification Cylindrique Et ConiqueDokument9 SeitenLa Rectification Cylindrique Et ConiqueAbderrazak MiassarNoch keine Bewertungen
- Etats de SurfaceDokument4 SeitenEtats de SurfaceAbderrazak MiassarNoch keine Bewertungen
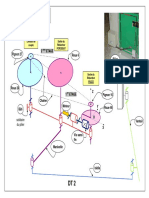
- DT2 Schema CinematiqueDokument1 SeiteDT2 Schema CinematiqueAbderrazak MiassarNoch keine Bewertungen
- Relais PDFDokument4 SeitenRelais PDFAbderrazak MiassarNoch keine Bewertungen
- Bascule CRDokument5 SeitenBascule CRAbderrazak MiassarNoch keine Bewertungen
- Forod 1bac Si s1 1Dokument4 SeitenForod 1bac Si s1 1Abderrazak MiassarNoch keine Bewertungen
- VARIATEURDokument5 SeitenVARIATEURAbderrazak MiassarNoch keine Bewertungen
- Les Moteurs À Courant Continu de Faible Puissance CablageDokument2 SeitenLes Moteurs À Courant Continu de Faible Puissance CablageAbderrazak MiassarNoch keine Bewertungen
- Station de PompageDokument5 SeitenStation de PompageAbderrazak MiassarNoch keine Bewertungen
- TSQ CM1Dokument43 SeitenTSQ CM1Aboubacar Fall100% (1)
- Conclusion GénéraleDokument5 SeitenConclusion Généralenina saNoch keine Bewertungen
- Internat À Titre Étranger 10 QCMDokument24 SeitenInternat À Titre Étranger 10 QCMAhmed Dbb100% (1)
- Klavy 3Dokument11 SeitenKlavy 3no meNoch keine Bewertungen
- La-Carità - RossiniDokument12 SeitenLa-Carità - RossiniPatrizio MoiNoch keine Bewertungen
- Systeme de Preformage Du CartonDokument11 SeitenSysteme de Preformage Du Cartonassiahakmi67% (3)
- TS Physique Chimie Cours PDFDokument12 SeitenTS Physique Chimie Cours PDFDarrel Foweng TchoNoch keine Bewertungen
- La Roue de Deming (PDCA)Dokument18 SeitenLa Roue de Deming (PDCA)ppdNoch keine Bewertungen
- TimersDokument10 SeitenTimersPFENoch keine Bewertungen
- Interferences Lumineuses - 230316 - 154348Dokument7 SeitenInterferences Lumineuses - 230316 - 154348Yacouba CamaraNoch keine Bewertungen
- Contrôle de La Qualité Dans La FabricationDokument4 SeitenContrôle de La Qualité Dans La FabricationAngeles Sendon GonzalezNoch keine Bewertungen
- Jusqu Ou Inserer Enri - PM v3gsDokument8 SeitenJusqu Ou Inserer Enri - PM v3gsali_025Noch keine Bewertungen
- Expression FrancaiseDokument29 SeitenExpression Francaisekrimo0100% (1)
- 6-Debitmetre A VortexDokument4 Seiten6-Debitmetre A VortexdantonkuNoch keine Bewertungen
- DOSSIER TECHNIQUE DE LA PRODUCTION de La Plaquette POUR LE PROJET DE REBOISEMENT DE L (Enregistré Automatiquement)Dokument11 SeitenDOSSIER TECHNIQUE DE LA PRODUCTION de La Plaquette POUR LE PROJET DE REBOISEMENT DE L (Enregistré Automatiquement)Jeanne Mbang EnamaNoch keine Bewertungen
- Maraichage SyntropiqueDokument11 SeitenMaraichage SyntropiqueE. Jean Message100% (3)
- Evolution Paysages Cours Integral 2007Dokument14 SeitenEvolution Paysages Cours Integral 2007Flash FacebookNoch keine Bewertungen
- Études D'aménagement en Voiries Et Réseaux Divers Du Complexe TouristiqueDokument178 SeitenÉtudes D'aménagement en Voiries Et Réseaux Divers Du Complexe Touristiqueayouta rezguiNoch keine Bewertungen
- Foisonnement Et TassementDokument7 SeitenFoisonnement Et TassementLalouani BounabNoch keine Bewertungen
- Memoire Magister Genie Civil 2010 PDFDokument144 SeitenMemoire Magister Genie Civil 2010 PDFHicham BenkihoulNoch keine Bewertungen
- Codes Des Dangers Et SignalisationsDokument18 SeitenCodes Des Dangers Et SignalisationsMohamed Soibaha ChaambaneNoch keine Bewertungen
- Seccion 02 Regulacion de Temperatura PDFDokument88 SeitenSeccion 02 Regulacion de Temperatura PDFcristianNoch keine Bewertungen
- QW 4778Dokument4 SeitenQW 4778QuentinMadecNoch keine Bewertungen
- Magazine PHOTO SOLUTION N.8 - Fevrier-Mars 2014 PDFDokument52 SeitenMagazine PHOTO SOLUTION N.8 - Fevrier-Mars 2014 PDFAbdou JeffersonNoch keine Bewertungen
- La Participation de L'indh Dans l'ESS À ProjeterDokument68 SeitenLa Participation de L'indh Dans l'ESS À ProjeterrachidaNoch keine Bewertungen
- ActualitéDokument2 SeitenActualitéYassine AiTNoch keine Bewertungen
- ECOUTE OEUVRES Jeux C2 C3Dokument6 SeitenECOUTE OEUVRES Jeux C2 C3Zoe De LuigiNoch keine Bewertungen
- Rapport de Perfectionnement 1Dokument42 SeitenRapport de Perfectionnement 1Kha LedNoch keine Bewertungen
- ExamenBactériologieDesSelles - CopieDokument18 SeitenExamenBactériologieDesSelles - CopiedaejangguemNoch keine Bewertungen
- Le Marteau de Michel-Ange (Y. Hersant)Dokument12 SeitenLe Marteau de Michel-Ange (Y. Hersant)rgqesgegeNoch keine Bewertungen