Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
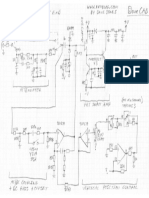
- Rigol DS1054Z Schematic FrontEndDokument1 SeiteRigol DS1054Z Schematic FrontEndArief Noor RahmanNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- VLSI System Design For Automotive ControlDokument7 SeitenVLSI System Design For Automotive ControlArief Noor RahmanNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- White-Paper Peltiertechnik 02-2013 EDokument15 SeitenWhite-Paper Peltiertechnik 02-2013 EArief Noor RahmanNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
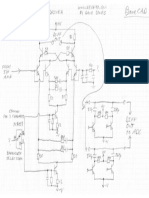
- Rigol DS1054Z Schematic DiffAmp PDFDokument1 SeiteRigol DS1054Z Schematic DiffAmp PDFArief Noor RahmanNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- l6561 PFC AnDokument21 Seitenl6561 PFC AnArief Noor RahmanNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- 1996 CUG Presentation Nonblocking AssignsDokument26 Seiten1996 CUG Presentation Nonblocking AssignsArief Noor RahmanNoch keine Bewertungen
- Comparative Analysis of Estimation Techniques of SFOC Induction Motor For Electric VehiclesDokument6 SeitenComparative Analysis of Estimation Techniques of SFOC Induction Motor For Electric VehiclesArief Noor RahmanNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Modeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorDokument11 SeitenModeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorArief Noor RahmanNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Simple and Reliable Rectifier For PMSG Wind Turbines by Using Series Reactive Compensator Named MERSDokument6 SeitenA Simple and Reliable Rectifier For PMSG Wind Turbines by Using Series Reactive Compensator Named MERSArief Noor RahmanNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Back To Back ConverterDokument114 SeitenBack To Back ConverterMateo Jimenez CastañoNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- 2N2222 Transistor BJTDokument2 Seiten2N2222 Transistor BJTMauricioGSNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Modeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFDokument12 SeitenModeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFArief Noor RahmanNoch keine Bewertungen
- 3 How To Create The PartsDokument47 Seiten3 How To Create The PartsArief Noor RahmanNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- 3 How To Create The PartsDokument47 Seiten3 How To Create The PartsArief Noor RahmanNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Progress 3Dokument5 SeitenProgress 3Arief Noor RahmanNoch keine Bewertungen
- MPC of Condesate Distillation ColumnDokument9 SeitenMPC of Condesate Distillation ColumnArief Noor RahmanNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- WorkstationDokument160 SeitenWorkstationArief Noor RahmanNoch keine Bewertungen
- Logic Circuit & Switching Theory Pre - Final Quiz 1Dokument14 SeitenLogic Circuit & Switching Theory Pre - Final Quiz 1Russel Mendoza100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- 35 Mixing Mistakes You Don T Know You Re Making Fader Jam EditionDokument25 Seiten35 Mixing Mistakes You Don T Know You Re Making Fader Jam EditionMatthew DamilareNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Fundamentals of Led Lighting: What Are The Benefits, What Are The Limita0onsDokument43 SeitenFundamentals of Led Lighting: What Are The Benefits, What Are The Limita0onsAdi IsmantoNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- DC Machines1.1 1Dokument19 SeitenDC Machines1.1 1Janaka Chathuranga AbeywardenaNoch keine Bewertungen
- FM ExercisesDokument5 SeitenFM ExercisesanililhanNoch keine Bewertungen
- Basic Busway TrainingDokument44 SeitenBasic Busway TrainingThức Võ100% (1)
- IXOSIL MSA145-XLMG One-Piece Slip-On Joint: Technical DataDokument1 SeiteIXOSIL MSA145-XLMG One-Piece Slip-On Joint: Technical DataMohammad NasarNoch keine Bewertungen
- 02 PDFDokument39 Seiten02 PDFbond29Noch keine Bewertungen
- Good OneDokument94 SeitenGood OneVishal PattanshettiNoch keine Bewertungen
- ESR Capacitor Meter Project PDFDokument22 SeitenESR Capacitor Meter Project PDFzoran_stev100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- B.E. (Instrumentation & Control) Subject: Building Automation-Ii Experiment Number: 2 Title: To Study Fas Loops and ClassificationsDokument11 SeitenB.E. (Instrumentation & Control) Subject: Building Automation-Ii Experiment Number: 2 Title: To Study Fas Loops and ClassificationsNɩĸʜɩɭ AɱɓʀɘNoch keine Bewertungen
- Sky-642 User Manual Ed.1-FinalDokument102 SeitenSky-642 User Manual Ed.1-FinalMisha KornevNoch keine Bewertungen
- Jndal Power ResumeDokument2 SeitenJndal Power ResumeRahul Kumar YadavNoch keine Bewertungen
- Lesson: Electromagnetic WavesDokument4 SeitenLesson: Electromagnetic WavesHuey TingNoch keine Bewertungen
- Product Manual 82434 (Revision C) : Generator Loading ControlDokument26 SeitenProduct Manual 82434 (Revision C) : Generator Loading ControlAUGUSTA WIBI ARDIKTANoch keine Bewertungen
- ATM To TE Mode Converter Designed With Semicircular Waveguide SectionsDokument4 SeitenATM To TE Mode Converter Designed With Semicircular Waveguide SectionshosseinNoch keine Bewertungen
- Ee 432 Cymos Final ReportDokument13 SeitenEe 432 Cymos Final Reportapi-309959382Noch keine Bewertungen
- Metrum PQ Controller DB System 4page Eng R24 WebbDokument4 SeitenMetrum PQ Controller DB System 4page Eng R24 WebbRAJESH KUMARNoch keine Bewertungen
- Controlinc: Insteon Tabletop ControllerDokument15 SeitenControlinc: Insteon Tabletop ControllerrandoNoch keine Bewertungen
- Embedded & Real Time Systems Notes by Suman KalyanDokument20 SeitenEmbedded & Real Time Systems Notes by Suman KalyanDaniel Paul100% (2)
- en HR RoDokument86 Seitenen HR RoGabriel SetnicNoch keine Bewertungen
- LM 5023Dokument38 SeitenLM 5023Kartik hegdeNoch keine Bewertungen
- Genius IO High Speed Counter User's Manual, GFK-0415EDokument145 SeitenGenius IO High Speed Counter User's Manual, GFK-0415EEduardo DiazNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Specification For Motor Actuators For ValvesDokument13 SeitenSpecification For Motor Actuators For ValvesDanish MohammedNoch keine Bewertungen
- Li Fi TechnologyDokument34 SeitenLi Fi TechnologyAmit Kumar MauryaNoch keine Bewertungen
- Fan Uc Manuals 1791Dokument322 SeitenFan Uc Manuals 1791Vlad Leucuta100% (3)
- L 4Dokument22 SeitenL 4Nafiz Musarrat ArnobNoch keine Bewertungen
- Ee321 ObjectivesDokument3 SeitenEe321 ObjectivesJomar DadorNoch keine Bewertungen
- Dynex Hisense Service Manual DX L40 10ADokument50 SeitenDynex Hisense Service Manual DX L40 10Acmh88888100% (1)
- A Welder’s Handbook to Robotic ProgrammingVon EverandA Welder’s Handbook to Robotic ProgrammingBewertung: 5 von 5 Sternen5/5 (3)
- Dark Aeon: Transhumanism and the War Against HumanityVon EverandDark Aeon: Transhumanism and the War Against HumanityBewertung: 5 von 5 Sternen5/5 (1)