Das könnte Ihnen auch gefallen
- Charoy PDFDokument25 SeitenCharoy PDFAhmed58seribegawanNoch keine Bewertungen
- DC DC Converters Output NoiseDokument10 SeitenDC DC Converters Output NoiseMallickarjuna AsNoch keine Bewertungen
- PCB Technical Interview QuestionsDokument55 SeitenPCB Technical Interview Questionssandee kumarNoch keine Bewertungen
- Practical Guide To High Speed PCB Layout by by John ArdizzoniDokument6 SeitenPractical Guide To High Speed PCB Layout by by John ArdizzoniblekstenaNoch keine Bewertungen
- PCB Layout Guidelines for High Speed Analog DesignsDokument5 SeitenPCB Layout Guidelines for High Speed Analog DesignscooksandNoch keine Bewertungen
- EMI Filters - CeramicDokument81 SeitenEMI Filters - CeramicmetamendNoch keine Bewertungen
- Design For PCB EMIEMC ComplianceDokument49 SeitenDesign For PCB EMIEMC ComplianceBen BeckerNoch keine Bewertungen
- Questions On Cables For EMC MitigationDokument3 SeitenQuestions On Cables For EMC MitigationnanimedichaNoch keine Bewertungen
- Transistor Active High Pass Filter Electronics NotesDokument2 SeitenTransistor Active High Pass Filter Electronics NotesRenato DeákNoch keine Bewertungen
- Grounding-Back To BasicsDokument5 SeitenGrounding-Back To BasicsUsman TariqNoch keine Bewertungen
- EMC Coupling & Countermeasures GuideDokument5 SeitenEMC Coupling & Countermeasures GuideVigneswaran VigneshNoch keine Bewertungen
- Filter PDFDokument21 SeitenFilter PDFNugraha PratamaNoch keine Bewertungen
- EMI in Power SuppliesDokument16 SeitenEMI in Power SuppliesHansraj AkilNoch keine Bewertungen
- Shielding RF Components at The Package LeveDokument12 SeitenShielding RF Components at The Package LeveSebastian ReguanNoch keine Bewertungen
- Techday - Introduction To RF DesignDokument67 SeitenTechday - Introduction To RF Designjacher_unamNoch keine Bewertungen
- 519 - Transmission Line Theory by VishnuDokument20 Seiten519 - Transmission Line Theory by VishnuMahesh HNoch keine Bewertungen
- Low Noise Printed Circuit Board DesignDokument9 SeitenLow Noise Printed Circuit Board DesignEmaxxSeverusNoch keine Bewertungen
- Speaker Crossover LabDokument51 SeitenSpeaker Crossover LabRoland HendriksNoch keine Bewertungen
- Microcontroller EMC Design Guidelines for PCB LayoutDokument63 SeitenMicrocontroller EMC Design Guidelines for PCB LayoutMr CdtNoch keine Bewertungen
- Signal Integrity PDFDokument21 SeitenSignal Integrity PDFmosa totahNoch keine Bewertungen
- AVR040: EMC Design ConsiderationsDokument22 SeitenAVR040: EMC Design ConsiderationsNaigel DiasNoch keine Bewertungen
- An-42007 AN42007 Safety, EMI and RFI ConsiderationsDokument6 SeitenAn-42007 AN42007 Safety, EMI and RFI ConsiderationsSunu PradanaNoch keine Bewertungen
- White Paper - Influencing Factors On Shielding Effectiveness of Board Level ShieldsDokument6 SeitenWhite Paper - Influencing Factors On Shielding Effectiveness of Board Level Shieldsdbm010102Noch keine Bewertungen
- EMI-EMC - SHORT Q and ADokument5 SeitenEMI-EMC - SHORT Q and AVENKAT PATILNoch keine Bewertungen
- Microstrip Lines - 382Dokument22 SeitenMicrostrip Lines - 382Narendra Babu GunnamNoch keine Bewertungen
- PCB shielding options for EMI protectionDokument2 SeitenPCB shielding options for EMI protectiongonzalezpuertoNoch keine Bewertungen
- Design Rules for Analog and Digital CircuitsDokument48 SeitenDesign Rules for Analog and Digital CircuitsShriparno deyNoch keine Bewertungen
- Do's and Don'ts For PCB Layer Stack-Up: by - Pragnesh Patel & Ronak ShahDokument9 SeitenDo's and Don'ts For PCB Layer Stack-Up: by - Pragnesh Patel & Ronak Shahbasit aliNoch keine Bewertungen
- 4 - How To Prevent Electromagnetic Interference From Ruining Your DevicesDokument16 Seiten4 - How To Prevent Electromagnetic Interference From Ruining Your DevicesShreyas AdkiNoch keine Bewertungen
- High-Fidelity PWM Inverter For Audio Amplification Based On Real-Time DSPDokument32 SeitenHigh-Fidelity PWM Inverter For Audio Amplification Based On Real-Time DSPsynkybabyNoch keine Bewertungen
- Analisis de Circuito Big MuffDokument10 SeitenAnalisis de Circuito Big MuffNacho ConsolaniNoch keine Bewertungen
- EMC Fact FileDokument2 SeitenEMC Fact FilewjscoNoch keine Bewertungen
- Class-D Power AmplifierDokument30 SeitenClass-D Power AmplifierSidney O. EbotNoch keine Bewertungen
- PCB Design Guide for EMC ComplianceDokument62 SeitenPCB Design Guide for EMC ComplianceVishu VishwajaNoch keine Bewertungen
- Mike HarwoodDokument26 SeitenMike HarwoodPraveen AndrewNoch keine Bewertungen
- Amplifier Frequecny ResponseDokument63 SeitenAmplifier Frequecny ResponseNuman khanNoch keine Bewertungen
- Datasheet f1010Dokument8 SeitenDatasheet f1010shobu21100% (1)
- Design of 4 Watt Power AmplifierDokument3 SeitenDesign of 4 Watt Power AmplifierTapas SarkarNoch keine Bewertungen
- Proper PCB Layout Techniques Maximize Power Module PerformanceDokument4 SeitenProper PCB Layout Techniques Maximize Power Module PerformancesumalaglNoch keine Bewertungen
- Cascode Amp Design Reduces DistortionDokument4 SeitenCascode Amp Design Reduces DistortionRaulh PerezNoch keine Bewertungen
- EMI ReportDokument66 SeitenEMI Reportanjithap1991Noch keine Bewertungen
- Basic VLSI SlidesDokument91 SeitenBasic VLSI SlidesDivya AhujaNoch keine Bewertungen
- FSK Demodulator With PLLDokument5 SeitenFSK Demodulator With PLLFlashPTNoch keine Bewertungen
- Loudspeaker Impedance With Sia Smaartlive: Paul D. HendersonDokument7 SeitenLoudspeaker Impedance With Sia Smaartlive: Paul D. HendersonGabo CodornizNoch keine Bewertungen
- Class D Amplifiers - Interactive SimulationsDokument5 SeitenClass D Amplifiers - Interactive SimulationsCristi BondNoch keine Bewertungen
- Coplanar WaveguideDokument3 SeitenCoplanar WaveguideMonikaPuniaNoch keine Bewertungen
- RF Filter Design5Dokument6 SeitenRF Filter Design5Joel WreckedNoch keine Bewertungen
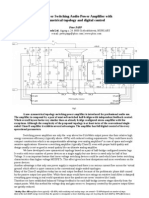
- High Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlDokument3 SeitenHigh Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlPéter PAPPNoch keine Bewertungen
- Narrow Band-Pass Filters for Low Frequency Applications: Evaluation of Eight Electronics Filter Design TopologiesVon EverandNarrow Band-Pass Filters for Low Frequency Applications: Evaluation of Eight Electronics Filter Design TopologiesNoch keine Bewertungen
- Modeling of Digital Communication Systems Using SIMULINKVon EverandModeling of Digital Communication Systems Using SIMULINKNoch keine Bewertungen
- Millimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationVon EverandMillimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationNoch keine Bewertungen
- High Efficiency RF and Microwave Solid State Power AmplifiersVon EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersBewertung: 1 von 5 Sternen1/5 (1)
- Electrical Overstress (EOS): Devices, Circuits and SystemsVon EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNoch keine Bewertungen
- Service Manual: TA-N9000ESDokument28 SeitenService Manual: TA-N9000ESGerardo Mendez CamarilloNoch keine Bewertungen
- I S Bus Specification: 1.0 2.0 Basic Serial Bus RequirementsDokument7 SeitenI S Bus Specification: 1.0 2.0 Basic Serial Bus RequirementseballiriNoch keine Bewertungen
- Sony G2be 1-878-988-31 Aps-243 SCH PDFDokument2 SeitenSony G2be 1-878-988-31 Aps-243 SCH PDFGerardo Mendez CamarilloNoch keine Bewertungen
- RSAG7 820 1357 çÊÓ ÓÊÕ Ú Çô Çâ Ô-ÀíÍ PDFDokument1 SeiteRSAG7 820 1357 çÊÓ ÓÊÕ Ú Çô Çâ Ô-ÀíÍ PDFGerardo Mendez CamarilloNoch keine Bewertungen
- dvs5500n DVD LG PDFDokument11 Seitendvs5500n DVD LG PDFGerardo Mendez CamarilloNoch keine Bewertungen
- JBL Class D Training WorkbookDokument24 SeitenJBL Class D Training WorkbookGerardo Mendez CamarilloNoch keine Bewertungen
- SSC2001S Application NoteDokument18 SeitenSSC2001S Application NoteGerardo Mendez CamarilloNoch keine Bewertungen
- Class D Audio Amplifier Basics PDFDokument14 SeitenClass D Audio Amplifier Basics PDFJulian De MarcosNoch keine Bewertungen
- Classd Digital Amplifier TutorialDokument54 SeitenClassd Digital Amplifier TutorialemerychNoch keine Bewertungen
- Alternating Current FundamentalsDokument25 SeitenAlternating Current Fundamentalsmariamoi suarezNoch keine Bewertungen
- 03B. Alternating Current (154-166)Dokument13 Seiten03B. Alternating Current (154-166)Mupli RajeshNoch keine Bewertungen
- GTU102.2 ING - Vers 2011Dokument90 SeitenGTU102.2 ING - Vers 2011Anonymous A55PY1bNoch keine Bewertungen
- Determination of Phase and Line Quantities in Three Phase Star and Delta Connected Loads - 4Dokument3 SeitenDetermination of Phase and Line Quantities in Three Phase Star and Delta Connected Loads - 4Purva SilwadiyaNoch keine Bewertungen
- EE301Topic35 PDFDokument9 SeitenEE301Topic35 PDFNaren VmdNoch keine Bewertungen
- Circuit Analysis -I Year ECE- Question BankDokument20 SeitenCircuit Analysis -I Year ECE- Question BankPandyselvi Balasubramanian100% (1)
- 978-615-5169-02-1 Energetic Medicine - Science Over Convention PDFDokument116 Seiten978-615-5169-02-1 Energetic Medicine - Science Over Convention PDFpapa123Noch keine Bewertungen
- Ohm's LawDokument11 SeitenOhm's LawMarifer RamirezNoch keine Bewertungen
- Induction Motor ControlDokument22 SeitenInduction Motor ControlSenpai TashiNoch keine Bewertungen
- NX100 Medar ControlDokument55 SeitenNX100 Medar ControlJP GreksaNoch keine Bewertungen
- Electrical cable technical specificationsDokument8 SeitenElectrical cable technical specificationsWael AlmassriNoch keine Bewertungen
- Electrical Power Unit Test QuestionsDokument3 SeitenElectrical Power Unit Test QuestionshksaifeeNoch keine Bewertungen
- CH II B Tuned AmplifierDokument50 SeitenCH II B Tuned Amplifierkassayeabate21Noch keine Bewertungen
- 2565 Engineering Tech Awards Dip MechDokument92 Seiten2565 Engineering Tech Awards Dip MechTharindu Samith AbeywickramaNoch keine Bewertungen
- PowerFactorCorrectionLV ICARDokument76 SeitenPowerFactorCorrectionLV ICARminjut100% (1)
- Imp Physics QuestionsDokument8 SeitenImp Physics QuestionsshivajiphdNoch keine Bewertungen
- Mesfet Noise ModelDokument3 SeitenMesfet Noise ModelGeorgios SarrisNoch keine Bewertungen
- Electives - SA1 CompilationDokument4 SeitenElectives - SA1 CompilationKYLE LEIGHZANDER VICENTENoch keine Bewertungen
- Earthing Transformers For Power SystemsDokument12 SeitenEarthing Transformers For Power SystemsSreekanth Reddy100% (1)
- Title:-: Measurement of PowerDokument5 SeitenTitle:-: Measurement of Powermuhammad faheem ziaNoch keine Bewertungen
- Psa Lab ManualDokument72 SeitenPsa Lab ManualLala Mosa100% (1)
- Estimation of The Zero-Sequence Impedance of Undergrounds Cables For Single-Phase Fault Location in Distribution SystemsDokument4 SeitenEstimation of The Zero-Sequence Impedance of Undergrounds Cables For Single-Phase Fault Location in Distribution SystemsMarianoNoch keine Bewertungen
- Static Synchronous Compensators STATCOMDokument4 SeitenStatic Synchronous Compensators STATCOMrajfabNoch keine Bewertungen
- Design of Armature Main DimensionsDokument25 SeitenDesign of Armature Main DimensionssenthilkumarNoch keine Bewertungen
- 5 EC 2151 - Electric Circuits and Electronic DevicesDokument3 Seiten5 EC 2151 - Electric Circuits and Electronic DevicesBIBIN CHIDAMBARANATHANNoch keine Bewertungen
- Circuits II 1.01 (Autosaved)Dokument98 SeitenCircuits II 1.01 (Autosaved)Patricia DatinguinooNoch keine Bewertungen
- Pu Assignment 1Dokument2 SeitenPu Assignment 1jasonNoch keine Bewertungen
- PSC QuestionsDokument2 SeitenPSC QuestionsjrjkNoch keine Bewertungen
- Power SystemsDokument76 SeitenPower SystemsGanesh RadharamNoch keine Bewertungen
- Active and Reactive Power Flow Control Using FACTS Devices: D. Murali Dr. M. RajaramDokument6 SeitenActive and Reactive Power Flow Control Using FACTS Devices: D. Murali Dr. M. RajaramKing SinghNoch keine Bewertungen