Das könnte Ihnen auch gefallen
- 133R0228 HLP-SK180 Series English Operating Manual V2013-04Dokument147 Seiten133R0228 HLP-SK180 Series English Operating Manual V2013-04salesiano05Noch keine Bewertungen
- Allen Bradley PowerFlex 4 User ManualDokument32 SeitenAllen Bradley PowerFlex 4 User Manualtariq001Noch keine Bewertungen
- Schneider LC-D ContactorsDokument45 SeitenSchneider LC-D ContactorsIvan VillanevaNoch keine Bewertungen
- MotcpDokument26 SeitenMotcpiambadassNoch keine Bewertungen
- Probs CH 2Dokument2 SeitenProbs CH 2Kiran KumarNoch keine Bewertungen
- Data Sheet OPT104Dokument2 SeitenData Sheet OPT104vitezixNoch keine Bewertungen
- BLT Series Bolaite Screw Air Compressor 5A-120A W-R2120Dokument18 SeitenBLT Series Bolaite Screw Air Compressor 5A-120A W-R2120daniNoch keine Bewertungen
- Wincupl ProgramsDokument14 SeitenWincupl ProgramsKavi GopaulNoch keine Bewertungen
- Simulink Design Optimization - User's GuideDokument411 SeitenSimulink Design Optimization - User's GuideAnonymous DgWkoyXPANoch keine Bewertungen
- Eurotherm Chessel 6100a PDFDokument2 SeitenEurotherm Chessel 6100a PDFRhondaNoch keine Bewertungen
- IoCT2 SS Astrom 1 PDFDokument2 SeitenIoCT2 SS Astrom 1 PDFAnonymous by1DIx6lhNoch keine Bewertungen
- (Atlas Copco) - Industrial Power Tools 2012Dokument332 Seiten(Atlas Copco) - Industrial Power Tools 2012mg_catana100% (1)
- Vitronics XPM ManualDokument53 SeitenVitronics XPM ManualManojNoch keine Bewertungen
- HF 2211 PDFDokument41 SeitenHF 2211 PDFDonni AzharNoch keine Bewertungen
- Information On Some of The Parts in PSpice LibrariesDokument8 SeitenInformation On Some of The Parts in PSpice Librarieshamza abdo mohamoudNoch keine Bewertungen
- LG - LBUM7280BL Exploded ViewDokument55 SeitenLG - LBUM7280BL Exploded ViewGuillermo HernandezNoch keine Bewertungen
- OP TC513BX TC203BX TC303BX OP464-V01 FinalDokument3 SeitenOP TC513BX TC203BX TC303BX OP464-V01 FinalSiddarthNoch keine Bewertungen
- Delta DVP-ES2 EX2 SS2 SA2 SX2 SE&TP-Program O EN 20130222 PDFDokument782 SeitenDelta DVP-ES2 EX2 SS2 SA2 SX2 SE&TP-Program O EN 20130222 PDFElias Ulises Manriquez FuentealbaNoch keine Bewertungen
- InTouch Version 10 Service Pack 2 ReadmeDokument7 SeitenInTouch Version 10 Service Pack 2 ReadmevishadkapadiaNoch keine Bewertungen
- ZPL40 ZPL50 ZPL70 LA-B181P r0.5 0218 r0.5 0325Dokument61 SeitenZPL40 ZPL50 ZPL70 LA-B181P r0.5 0218 r0.5 0325Telefono TallerNoch keine Bewertungen
- MM440 Faults AlarmsDokument12 SeitenMM440 Faults AlarmsRefaey Abo HelalNoch keine Bewertungen
- Sensor Less BLDC Motor Control Based On Cy8c24x33 An47936 12Dokument10 SeitenSensor Less BLDC Motor Control Based On Cy8c24x33 An47936 12reemaroy08100% (14)
- Medidor Digital de Potencia Socomec, LCDDokument4 SeitenMedidor Digital de Potencia Socomec, LCDMaicol PinedaNoch keine Bewertungen
- Product Catalogue For WUHAN HUAYING ELECTRIC POWER TECH&SCIENCE CO.,LTDDokument37 SeitenProduct Catalogue For WUHAN HUAYING ELECTRIC POWER TECH&SCIENCE CO.,LTDhayanellNoch keine Bewertungen
- LIFECO Conventional Fire Alarm Systems LF-CP 1 To 36Dokument7 SeitenLIFECO Conventional Fire Alarm Systems LF-CP 1 To 36Reginald D. De GuzmanNoch keine Bewertungen
- Manual SMC Dialog Plus Controller. Allen BradleyDokument189 SeitenManual SMC Dialog Plus Controller. Allen BradleygreenlinexNoch keine Bewertungen
- Assignment On Numerical RelayDokument3 SeitenAssignment On Numerical RelaydinukaeeNoch keine Bewertungen
- Cable Test Bridge KMK 7Dokument2 SeitenCable Test Bridge KMK 7zaki3speedNoch keine Bewertungen
- A Sliding Mode Control For Robot ManipulatorDokument27 SeitenA Sliding Mode Control For Robot ManipulatorauraliusNoch keine Bewertungen
- Altivar 31 - ATV31HU40N4ADokument3 SeitenAltivar 31 - ATV31HU40N4Avendas.ilimitadasNoch keine Bewertungen
- SKK Gearmotor MFG500 Series A Series CataloqDokument128 SeitenSKK Gearmotor MFG500 Series A Series Cataloqyb7knv100% (2)
- PEAK-System - CAN Basics & PCAN-Explorer 6 - India2019Dokument61 SeitenPEAK-System - CAN Basics & PCAN-Explorer 6 - India2019Kavya VenkatNoch keine Bewertungen
- Address Map ZR90 - A1 Gen 1 Gateway Mod (S904899)Dokument10 SeitenAddress Map ZR90 - A1 Gen 1 Gateway Mod (S904899)leorio88100% (1)
- SpeederOne Software InterfaceDokument36 SeitenSpeederOne Software InterfacelubnaNoch keine Bewertungen
- Remote FCU ManualDokument12 SeitenRemote FCU ManualHạ NhậtNoch keine Bewertungen
- A5 Liqi CatalogoDokument4 SeitenA5 Liqi CatalogoPaladini100% (1)
- Vacon NX OPTC2 C8 Modbus N2 Board User Manual DPD0Dokument42 SeitenVacon NX OPTC2 C8 Modbus N2 Board User Manual DPD0TanuTiganuNoch keine Bewertungen
- DC Servo Motor Position SystemDokument28 SeitenDC Servo Motor Position SystemVincent Korie100% (2)
- 600071EN - Conversion IVIS 5 - CEETIS - 1ADokument28 Seiten600071EN - Conversion IVIS 5 - CEETIS - 1ACsanád KalmárNoch keine Bewertungen
- ABB PID Functional Description PDFDokument33 SeitenABB PID Functional Description PDFgicntNoch keine Bewertungen
- Manual MODBUS TCP BrabenderDokument7 SeitenManual MODBUS TCP BrabenderotavioalcaldeNoch keine Bewertungen
- HYDAC EDS 300 User ManualDokument14 SeitenHYDAC EDS 300 User Manualdineshrocks4uNoch keine Bewertungen
- ES16 TrainingDokument21 SeitenES16 TrainingThành VănNoch keine Bewertungen
- Unigy Troubleshooting Manual R4 PDFDokument13 SeitenUnigy Troubleshooting Manual R4 PDFNikolay Velchev100% (2)
- SONY XC-75 - 73e CameraDokument6 SeitenSONY XC-75 - 73e Camerastefanrik5148Noch keine Bewertungen
- Um en Visu Vba 8162 en 23 PDFDokument1.269 SeitenUm en Visu Vba 8162 en 23 PDFAMR SiderurgicosNoch keine Bewertungen
- Standard Ac Eng PDFDokument324 SeitenStandard Ac Eng PDFPranav KrishnaNoch keine Bewertungen
- SCADA Vantage Data Communication SV5.6.5 Between SV5.1.1.-UpdatedDokument15 SeitenSCADA Vantage Data Communication SV5.6.5 Between SV5.1.1.-UpdatedRehanul DhanveerNoch keine Bewertungen
- CG239CD TH 32Dokument3 SeitenCG239CD TH 32aleksandaral100% (1)
- Detectomat Katalog 2011Dokument226 SeitenDetectomat Katalog 2011Milica LolićNoch keine Bewertungen
- China Thermal Mass Flow Meter ManualDokument34 SeitenChina Thermal Mass Flow Meter ManualEllen ShengNoch keine Bewertungen
- GE Multilin Feeder Management Relay 750man-A6Dokument336 SeitenGE Multilin Feeder Management Relay 750man-A6Carlos Astorga DNoch keine Bewertungen
- Comparison of Various System Identification Methods For A MISO SystemDokument16 SeitenComparison of Various System Identification Methods For A MISO SystemSashank Varma JampanaNoch keine Bewertungen
- House Price Prediction Using Machine Learning in PythonDokument13 SeitenHouse Price Prediction Using Machine Learning in PythonMayank Vasisth GandhiNoch keine Bewertungen
- Matlab SysId TutorialDokument23 SeitenMatlab SysId TutorialPhạm Văn TưởngNoch keine Bewertungen
- Model Gen ManDokument9 SeitenModel Gen ManArnab Jyoti BaruahNoch keine Bewertungen
- Array Initialization: Datatype Arrayname (Size) (List of Value of Same Type)Dokument29 SeitenArray Initialization: Datatype Arrayname (Size) (List of Value of Same Type)Sumit PandyaNoch keine Bewertungen
- Arduino DesignDokument9 SeitenArduino DesignAngel Hernandez BravoNoch keine Bewertungen
- Detect Abrupt System Changes Using Identification TechniquesDokument6 SeitenDetect Abrupt System Changes Using Identification TechniquesPierpaolo VergatiNoch keine Bewertungen
- InitializationDokument16 SeitenInitializationlexNoch keine Bewertungen
- lp2 - Systems of Equations Their SolutionsDokument7 Seitenlp2 - Systems of Equations Their Solutionsapi-353551219Noch keine Bewertungen
- Lectures On Communicative AlgebraDokument64 SeitenLectures On Communicative Algebramimi_loveNoch keine Bewertungen
- DFC 1023 Problem Solving & Program DesignDokument24 SeitenDFC 1023 Problem Solving & Program DesignKhaiTeoNoch keine Bewertungen
- Grades 9 Daily Lesson Log School Grade Level 9 Teacher Learning Area MATHEMATICS Teaching Dates and Time Quarter FIRSTDokument11 SeitenGrades 9 Daily Lesson Log School Grade Level 9 Teacher Learning Area MATHEMATICS Teaching Dates and Time Quarter FIRSTELAIZA SUPERIORIDADNoch keine Bewertungen
- Annexure-37. MSC Mathematics Sep 4 2018Dokument51 SeitenAnnexure-37. MSC Mathematics Sep 4 2018Avani YadavNoch keine Bewertungen
- Functions Lesson Plans EdtpaDokument7 SeitenFunctions Lesson Plans Edtpaapi-272608829Noch keine Bewertungen
- Exam - Questions PDFDokument5 SeitenExam - Questions PDFKris ANoch keine Bewertungen
- Small Stability SMIB ExampleDokument8 SeitenSmall Stability SMIB ExampleJaol1976Noch keine Bewertungen
- Linear ProgrammingDokument34 SeitenLinear ProgrammingVinaySinghNoch keine Bewertungen
- Unit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Dokument32 SeitenUnit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Zara Nabilah100% (2)
- (Ernest, Paul) The Philosophy of Mathematics Educa (BookFi)Dokument344 Seiten(Ernest, Paul) The Philosophy of Mathematics Educa (BookFi)Aisyah AdelinaNoch keine Bewertungen
- Study Material 6th Maths, 2023-24Dokument101 SeitenStudy Material 6th Maths, 2023-24tanaydhanvinNoch keine Bewertungen
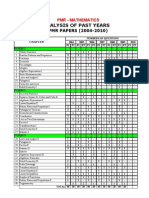
- Analysis of Past Year Questions - Maths PMRDokument1 SeiteAnalysis of Past Year Questions - Maths PMRPatrick ChinNoch keine Bewertungen
- 1 Problems: N + 1 1) N N+ N N!Dokument4 Seiten1 Problems: N + 1 1) N N+ N N!wwwNoch keine Bewertungen
- MTAP ReviewerDokument15 SeitenMTAP ReviewerJULIUS COLLADONoch keine Bewertungen
- CP1 2020Dokument4 SeitenCP1 2020Win LinNoch keine Bewertungen
- 1 Theory of Convex FunctionsDokument14 Seiten1 Theory of Convex FunctionsLuis Carlos RojanoNoch keine Bewertungen
- Gaussian DistributionDokument32 SeitenGaussian DistributionChristine AllenNoch keine Bewertungen
- MathgrrDokument11 SeitenMathgrrClyde HugoNoch keine Bewertungen
- Obs 1 Solving Multi-Step Equations Guided NotesDokument8 SeitenObs 1 Solving Multi-Step Equations Guided NotesMr. Peterson100% (1)
- Quadratic Equations-3Dokument46 SeitenQuadratic Equations-3jitender80% (1)
- Statement of Purpose - Uppsala UniversityDokument1 SeiteStatement of Purpose - Uppsala UniversityAANoch keine Bewertungen
- Foundations and Pre-Calc 10 Old CurriculumDokument10 SeitenFoundations and Pre-Calc 10 Old Curriculumapi-372778638Noch keine Bewertungen
- Tensorflow Keras Pytorch: Step 1: For Each Input, Multiply The Input Value X With Weights WDokument6 SeitenTensorflow Keras Pytorch: Step 1: For Each Input, Multiply The Input Value X With Weights Wisaac setabiNoch keine Bewertungen
- Unit I Introduction: Mf7201 Optimization Techniques in ManufacturingDokument3 SeitenUnit I Introduction: Mf7201 Optimization Techniques in ManufacturingCody LeeNoch keine Bewertungen
- Calculate Karl PearsonDokument2 SeitenCalculate Karl Pearsonjaitripathi26100% (1)
- General Mathematics: Quarter 1 - Module 18: Solving Exponential Equations and InequalitiesDokument19 SeitenGeneral Mathematics: Quarter 1 - Module 18: Solving Exponential Equations and InequalitiesDaphneeNoch keine Bewertungen
- Functions Piecewise Functions Lesson 4 Ver2Dokument11 SeitenFunctions Piecewise Functions Lesson 4 Ver2Rafi Ano-osNoch keine Bewertungen
- Module 4Dokument29 SeitenModule 4Michelle Jane SevillaNoch keine Bewertungen
- Numerical Methods For Civil Engineering PDFDokument256 SeitenNumerical Methods For Civil Engineering PDFq_giovanni0% (2)