Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Analysis of The FM SpectrumDokument12 SeitenAnalysis of The FM SpectrumftkoayNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- D1-08 BPSK-binary Phase Shift KeyingDokument10 SeitenD1-08 BPSK-binary Phase Shift KeyingftkoayNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- d2-12 Qam and 4-PskDokument8 Seitend2-12 Qam and 4-PskftkoayNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- ASP BegrippenlijstDokument1 SeiteASP BegrippenlijstftkoayNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Analysis of The FM SpectrumDokument12 SeitenAnalysis of The FM SpectrumftkoayNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- D1-07 FSK-frequency Shift KeyingDokument10 SeitenD1-07 FSK-frequency Shift KeyingftkoayNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
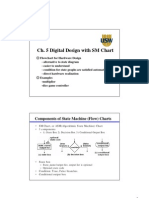
- DSD VHDL Ch5Dokument23 SeitenDSD VHDL Ch5ftkoayNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- CSE 7349 - Project Port Scan Detector (PSD)Dokument6 SeitenCSE 7349 - Project Port Scan Detector (PSD)ftkoayNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- D1-08 BPSK-binary Phase Shift KeyingDokument10 SeitenD1-08 BPSK-binary Phase Shift KeyingftkoayNoch keine Bewertungen
- Rs232 Serial CommunicationDokument4 SeitenRs232 Serial CommunicationJuan Diaz100% (1)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
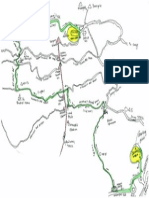
- Penang Hill Heritage Forest Challenge MapDokument1 SeitePenang Hill Heritage Forest Challenge MapftkoayNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Finite State MachineDokument75 SeitenFinite State Machinecall_asitNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Visualization Software For Computer Systems Organization and ArchitectureDokument10 SeitenVisualization Software For Computer Systems Organization and ArchitectureftkoayNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Folder Becomes ShortcutDokument1 SeiteFolder Becomes ShortcutftkoayNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Estimation of Measurement Uncertainty For Electrical Conductivity in WaterDokument4 SeitenEstimation of Measurement Uncertainty For Electrical Conductivity in WaterMaruthi KNoch keine Bewertungen
- Somanabolic+Muscle+Maximizer+PDF+ +eBook+Free+Download+Kyle+LeonDokument34 SeitenSomanabolic+Muscle+Maximizer+PDF+ +eBook+Free+Download+Kyle+LeonAaron BarclayNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Argumentative EssayDokument7 SeitenArgumentative EssayHoang Thi Huyen DieuNoch keine Bewertungen
- Symantec Endpoint Protection 14.3 RU3 Release NotesDokument28 SeitenSymantec Endpoint Protection 14.3 RU3 Release NotesMilind KuleNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Unit 2: TransducerDokument24 SeitenUnit 2: TransducerROYAL GAMER YTNoch keine Bewertungen
- CERADokument10 SeitenCERAKeren Margarette AlcantaraNoch keine Bewertungen
- Ringleman Chart FlareDokument12 SeitenRingleman Chart FlareguhadebasisNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- GutsDokument552 SeitenGutsroparts cluj100% (1)
- Preliminary Exam (Primark)Dokument4 SeitenPreliminary Exam (Primark)Zybel RosalesNoch keine Bewertungen
- A Single-Stage Asymmetrical Half-Bridge Flyback CoDokument16 SeitenA Single-Stage Asymmetrical Half-Bridge Flyback CoSantosh KumarNoch keine Bewertungen
- Assessment 3 Comparative Analysis Primary Vs Secondary SourcesDokument5 SeitenAssessment 3 Comparative Analysis Primary Vs Secondary SourcesMATOZA, YLJOE V.Noch keine Bewertungen
- Competency #14 Ay 2022-2023 Social StudiesDokument22 SeitenCompetency #14 Ay 2022-2023 Social StudiesCharis RebanalNoch keine Bewertungen
- Shaira Narrative Report (Final)Dokument7 SeitenShaira Narrative Report (Final)Sheryll TamangNoch keine Bewertungen
- Hal Foster Vision and Visuality Discussions in Contemporary Culture PDFDokument75 SeitenHal Foster Vision and Visuality Discussions in Contemporary Culture PDFEd GomesNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Clay and Shale, Robert L VirtaDokument24 SeitenClay and Shale, Robert L VirtaRifqi Brilyant AriefNoch keine Bewertungen
- Application List: Required Items: A: Cpu-95 Ignition ModuleDokument12 SeitenApplication List: Required Items: A: Cpu-95 Ignition ModuleShubra DebNoch keine Bewertungen
- The Role of Leadership On Employee Performance in Singapore AirlinesDokument42 SeitenThe Role of Leadership On Employee Performance in Singapore Airlineskeshav sabooNoch keine Bewertungen
- ErtlDokument64 SeitenErtlManpreet SinghNoch keine Bewertungen
- Position Trading Maximizing Probability of Winning TradesDokument91 SeitenPosition Trading Maximizing Probability of Winning Tradescarlo bakaakoNoch keine Bewertungen
- ACI 318M-11 RC Bracket and Corbel Design - v0.03 - 2017-04-10Dokument5 SeitenACI 318M-11 RC Bracket and Corbel Design - v0.03 - 2017-04-10arken123Noch keine Bewertungen
- CIVIL 3811 - Lecture Slides - Week 7Dokument58 SeitenCIVIL 3811 - Lecture Slides - Week 7hadaNoch keine Bewertungen
- Method For Determination of Iron Folic Acid & Vitamin B12 in FRK - 07.11.2023Dokument17 SeitenMethod For Determination of Iron Folic Acid & Vitamin B12 in FRK - 07.11.2023jonesbennetteNoch keine Bewertungen
- Theater InstallationDokument7 SeitenTheater InstallationtemamNoch keine Bewertungen
- Satellite Value Chain: Snapshot 2017Dokument13 SeitenSatellite Value Chain: Snapshot 2017syrijal26Noch keine Bewertungen
- Nemo Outdoor 8.40 User Guide PDFDokument392 SeitenNemo Outdoor 8.40 User Guide PDFXxbugmenotxXNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 31504647-Antenna System (On Tower) Installation Standard ModelDokument27 Seiten31504647-Antenna System (On Tower) Installation Standard ModelBadr AmerNoch keine Bewertungen
- Xafsa 1Dokument19 SeitenXafsa 1Heitham OmarNoch keine Bewertungen
- Fastener Torque Charts: Phone: 1-800-558-2808 Fax: 1-800-553-8769Dokument2 SeitenFastener Torque Charts: Phone: 1-800-558-2808 Fax: 1-800-553-8769KOMATSU SHOVELNoch keine Bewertungen
- Al Rafay ProfileDokument8 SeitenAl Rafay ProfileRana UsmanNoch keine Bewertungen
- Tuan Nor Akmal Imanina Binti Tuan MasorDokument2 SeitenTuan Nor Akmal Imanina Binti Tuan MasorIzza RosliNoch keine Bewertungen
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsVon EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNoch keine Bewertungen