Das könnte Ihnen auch gefallen
- The Theory of Play Neva L. BoydDokument128 SeitenThe Theory of Play Neva L. BoydStephen Dela Cruz100% (1)
- Little Sunflower BBDokument1 SeiteLittle Sunflower BBVincent Vrignaud50% (2)
- (Studies in Musical Performance As Creative Practice) John Rink, Helena Gaunt, Aaron Williamon - Musicians in The Making - Pathways To Creative Performance (2017, Oxford University Press) PDFDokument409 Seiten(Studies in Musical Performance As Creative Practice) John Rink, Helena Gaunt, Aaron Williamon - Musicians in The Making - Pathways To Creative Performance (2017, Oxford University Press) PDFSofia100% (6)
- European Patent Specification F01D 11/00, F01D 5/26: Printed by Jouve, 75001 PARIS (FR)Dokument13 SeitenEuropean Patent Specification F01D 11/00, F01D 5/26: Printed by Jouve, 75001 PARIS (FR)shamsNoch keine Bewertungen
- Damping device for limiting trailer yaw motionsDokument12 SeitenDamping device for limiting trailer yaw motionsErkanAksoyluNoch keine Bewertungen
- Hydraulic engine mount with variable movement absorptionDokument17 SeitenHydraulic engine mount with variable movement absorptionmarcglebNoch keine Bewertungen
- Paper Rotor DynamicsDokument12 SeitenPaper Rotor DynamicsTony HeNoch keine Bewertungen
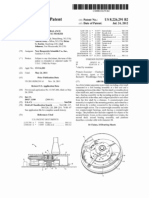
- US Patent 7090236 Land SailingDokument8 SeitenUS Patent 7090236 Land SailingDimas MaulanaNoch keine Bewertungen
- Wake Effect of A WT Wind TurbulenceDokument3 SeitenWake Effect of A WT Wind TurbulencejslrNoch keine Bewertungen
- Tip Brake Mechanism Slows Wind Turbine Blade RotationDokument11 SeitenTip Brake Mechanism Slows Wind Turbine Blade RotationRubén Gutiérrez AmoNoch keine Bewertungen
- Patent Brake System for DrawworksDokument9 SeitenPatent Brake System for DrawworksardserNoch keine Bewertungen
- On The Design and Analysis of Pre-Swirl Stators For Single and Twin Screw ShipsDokument8 SeitenOn The Design and Analysis of Pre-Swirl Stators For Single and Twin Screw ShipsMichael McDonaldNoch keine Bewertungen
- Vibration ProblemsDokument18 SeitenVibration ProblemsKarthick RamNoch keine Bewertungen
- Gorney - FlapDokument31 SeitenGorney - Flapbbairplanes_michaelNoch keine Bewertungen
- Adjustable Orbital Shaker Compensates for ImbalanceDokument26 SeitenAdjustable Orbital Shaker Compensates for ImbalanceSoma GhoshNoch keine Bewertungen
- Segmented Sealing Lips Reduce Cracking in Turbine Disk SealsDokument4 SeitenSegmented Sealing Lips Reduce Cracking in Turbine Disk SealsshamsNoch keine Bewertungen
- Passrucker Endversion Paper JournalDokument10 SeitenPassrucker Endversion Paper JournalKirill GrebennikNoch keine Bewertungen
- Vortex GeneratorsDokument18 SeitenVortex GeneratorsEmiliano RenziNoch keine Bewertungen
- An Experimental Study of A Cyclonic Vertical Axis Wind Turb - 2015 - Procedia enDokument6 SeitenAn Experimental Study of A Cyclonic Vertical Axis Wind Turb - 2015 - Procedia enyirga shitahunNoch keine Bewertungen
- Aircraft Brake and Method With Electromechanical Actuator ModulesDokument8 SeitenAircraft Brake and Method With Electromechanical Actuator ModulesHassanNoch keine Bewertungen
- Damping The Propeller Vibration PDFDokument99 SeitenDamping The Propeller Vibration PDFAyman SaadNoch keine Bewertungen
- Amphibious vehicle with retractable wheels for land and marine modesDokument7 SeitenAmphibious vehicle with retractable wheels for land and marine modesTâm DươngNoch keine Bewertungen
- Fin Area EffectDokument8 SeitenFin Area EffectyildirimelifNoch keine Bewertungen
- Teoria vortexilorDokument118 SeitenTeoria vortexilorAlexandru AlexNoch keine Bewertungen
- TEPZZ - 4 885B - T: European Patent SpecificationDokument10 SeitenTEPZZ - 4 885B - T: European Patent SpecificationshamsNoch keine Bewertungen
- Performance Evaluation of A Flettner Rotor With A Flap 1675501861Dokument13 SeitenPerformance Evaluation of A Flettner Rotor With A Flap 1675501861doğancan uzun100% (1)
- InTech-Wind Turbine Gearbox TechnologiesDokument18 SeitenInTech-Wind Turbine Gearbox TechnologieshamdimouhhiNoch keine Bewertungen
- US3889885Dokument7 SeitenUS3889885Claudinei MayerNoch keine Bewertungen
- Numerical Implications of Solidity and Blade Number On Rotor Performance of Horizontal-Axis Wind TurbinesDokument8 SeitenNumerical Implications of Solidity and Blade Number On Rotor Performance of Horizontal-Axis Wind TurbinesNicolás Cristóbal Uzárraga RodríguezNoch keine Bewertungen
- Flow Analysis of Vortex Generators On Wing Sections by Stereoscopic Particle Image Velocimetry MeasurementsDokument12 SeitenFlow Analysis of Vortex Generators On Wing Sections by Stereoscopic Particle Image Velocimetry MeasurementsNITESH JHANoch keine Bewertungen
- Dynamic Positioning SystemDokument9 SeitenDynamic Positioning Systemdevu2chodankarNoch keine Bewertungen
- Introduction To Rotor TugDokument9 SeitenIntroduction To Rotor TugMoe Oo ZunNoch keine Bewertungen
- Numerical Study of Six Bladed Savonius Wind TurbineDokument5 SeitenNumerical Study of Six Bladed Savonius Wind TurbineShashank Mishra100% (1)
- Blower InformationDokument36 SeitenBlower InformationshreemugNoch keine Bewertungen
- 2004.12 Mitsubishi (MHI) Stator-Fin Ship Energy Saving Device DesignDokument4 Seiten2004.12 Mitsubishi (MHI) Stator-Fin Ship Energy Saving Device Designgnd100Noch keine Bewertungen
- Effect of Turbulence on Savonius Rotor Efficiency in Wind TunnelsDokument19 SeitenEffect of Turbulence on Savonius Rotor Efficiency in Wind TunnelsMilenko ZivancevNoch keine Bewertungen
- Tailshaft Clearance Bearing: Topics by Science - GovDokument181 SeitenTailshaft Clearance Bearing: Topics by Science - GovfrancisNoch keine Bewertungen
- Compressor Failures: by TMI Staff & Contributors On December 7, 2019Dokument3 SeitenCompressor Failures: by TMI Staff & Contributors On December 7, 2019KR PANoch keine Bewertungen
- Geometry of Screw Compressor Rotors and Their ToolsDokument17 SeitenGeometry of Screw Compressor Rotors and Their ToolsPhox IndiaNoch keine Bewertungen
- Forward Flight Lecture2Dokument6 SeitenForward Flight Lecture2durak89Noch keine Bewertungen
- US20140302938A1Dokument15 SeitenUS20140302938A1雷黎明Noch keine Bewertungen
- High Performance Foil Rotor Improves De-Ink Pulp ScreeningDokument9 SeitenHigh Performance Foil Rotor Improves De-Ink Pulp ScreeningAliNoch keine Bewertungen
- FM05Dokument13 SeitenFM05jepegoNoch keine Bewertungen
- C TDokument7 SeitenC TStefania OliveiraNoch keine Bewertungen
- Wind Turbine Gearbox Technologies: April 2010Dokument19 SeitenWind Turbine Gearbox Technologies: April 2010Adarsh ShindeNoch keine Bewertungen
- Boite Seamless XtracDokument13 SeitenBoite Seamless Xtracdudule01Noch keine Bewertungen
- Effects of Flow Parameters On The Performance of Vertical Axis Swirling Type Savonius Wind Turbine A. Al-Faruk and A. S. SharifianDokument15 SeitenEffects of Flow Parameters On The Performance of Vertical Axis Swirling Type Savonius Wind Turbine A. Al-Faruk and A. S. SharifianCokordaGede RaamSuyasaNoch keine Bewertungen
- Some Advantages of Welding Turbine Rotors PDFDokument10 SeitenSome Advantages of Welding Turbine Rotors PDFAli VarmazyarNoch keine Bewertungen
- Bousman TMDokument56 SeitenBousman TMTarak Nath NandiNoch keine Bewertungen
- The essential role of the air gap in electric motors and generatorsDokument7 SeitenThe essential role of the air gap in electric motors and generatorsAlfredo MedinaNoch keine Bewertungen
- A Study of Churning Losses in Dip-Lubricated Spur Gears PDFDokument11 SeitenA Study of Churning Losses in Dip-Lubricated Spur Gears PDFPrasad RaikarNoch keine Bewertungen
- An Analysis of The NREL 5 MW Semisubmersible Wind Turbine Using Data From Morro BayDokument22 SeitenAn Analysis of The NREL 5 MW Semisubmersible Wind Turbine Using Data From Morro BayDantheManNoch keine Bewertungen
- Lagrangian SourceDokument7 SeitenLagrangian SourceAnonymous caJfG6Noch keine Bewertungen
- FREE YAW Report AnalysisDokument4 SeitenFREE YAW Report AnalysisMohamed HammamNoch keine Bewertungen
- Fix Pitch PropellerDokument7 SeitenFix Pitch PropellerRisandi Dwirama PutraNoch keine Bewertungen
- Hybrid Active Magnetic Bearing InfoDokument2 SeitenHybrid Active Magnetic Bearing Infomartdot73490Noch keine Bewertungen
- Turb 135 4 041010Dokument8 SeitenTurb 135 4 041010Moisés SolisNoch keine Bewertungen
- Yaesu G-450A Operating ManualDokument15 SeitenYaesu G-450A Operating Manualdj03djj100% (1)
- HE Nozzle DevDokument21 SeitenHE Nozzle DevJonathan MooreNoch keine Bewertungen
- Synchronous Generator for Wind Power PlantsDokument14 SeitenSynchronous Generator for Wind Power PlantsYesmaRofiaNoch keine Bewertungen
- Natural Stability and the Parachute Principle in AeroplanesVon EverandNatural Stability and the Parachute Principle in AeroplanesNoch keine Bewertungen
- Scientific American Supplement, No. 787, January 31, 1891Von EverandScientific American Supplement, No. 787, January 31, 1891Noch keine Bewertungen
- Gas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesVon EverandGas-Engines and Producer-Gas Plants A Practice Treatise Setting Forth the Principles of Gas-Engines and Producer Design, the Selection and Installation of an Engine, Conditions of Perfect Operation, Producer-Gas Engines and Their Possibilities, the Care of Gas-Engines and Producer-Gas Plants, with a Chapter on Volatile Hydrocarbon and Oil EnginesNoch keine Bewertungen
- The Companies Bill 2012Dokument7 SeitenThe Companies Bill 2012Raju ShawNoch keine Bewertungen
- Us 4602584 ADokument9 SeitenUs 4602584 Amaniishsinghal8097Noch keine Bewertungen
- Centralised Purchase Rules 21102016Dokument13 SeitenCentralised Purchase Rules 21102016maniishsinghal8097Noch keine Bewertungen
- Three Concepts of EqualityDokument28 SeitenThree Concepts of Equalitymaniishsinghal8097Noch keine Bewertungen
- WO2011103870A3 TranslatedDokument4 SeitenWO2011103870A3 Translatedmaniishsinghal8097Noch keine Bewertungen
- Ep1278457b1 EnglishDokument19 SeitenEp1278457b1 Englishmaniishsinghal8097Noch keine Bewertungen
- De69934247t2 EnglishDokument20 SeitenDe69934247t2 Englishmaniishsinghal8097Noch keine Bewertungen
- WP PurePlay Vs Embedded TDFDokument11 SeitenWP PurePlay Vs Embedded TDFmaniishsinghal8097Noch keine Bewertungen
- WO2011103870A3 OriginalDokument6 SeitenWO2011103870A3 Originalmaniishsinghal8097Noch keine Bewertungen
- Habits of Happiness: Quotes on AppreciationDokument1 SeiteHabits of Happiness: Quotes on Appreciationmaniishsinghal8097Noch keine Bewertungen
- GoodyearDokument4 SeitenGoodyearmaniishsinghal8097Noch keine Bewertungen
- 24 June 2006 Option ADokument16 Seiten24 June 2006 Option Amaniishsinghal8097Noch keine Bewertungen
- Quote UnquoteDokument1 SeiteQuote Unquotemaniishsinghal8097Noch keine Bewertungen
- Friction Retard FeederDokument14 SeitenFriction Retard Feedermaniishsinghal8097Noch keine Bewertungen
- Ethereal PainDokument5 SeitenEthereal PainVanessa PérezNoch keine Bewertungen
- The Legend of King Arthur: 7. Juni 2016, BrucknerhausDokument8 SeitenThe Legend of King Arthur: 7. Juni 2016, BrucknerhausJuan David Diaz RuizNoch keine Bewertungen
- (Studies in The History of Christian Traditions 168) Loewe - Johann Sebastian Bach's ST John Passion BWV 245 A Theological Commentary 2014Dokument351 Seiten(Studies in The History of Christian Traditions 168) Loewe - Johann Sebastian Bach's ST John Passion BWV 245 A Theological Commentary 2014Esotericist Ignotus100% (1)
- This Little Light of MineDokument9 SeitenThis Little Light of MineNatalija Duh-Grinaver100% (1)
- A Child's Christmas in WalesDokument3 SeitenA Child's Christmas in WalesJ-31069Noch keine Bewertungen
- Knowledge Our Light TitleDokument32 SeitenKnowledge Our Light TitleadimbaitNoch keine Bewertungen
- Critical Mass: Preview OnlyDokument20 SeitenCritical Mass: Preview OnlyRyan GrijalvaNoch keine Bewertungen
- Diva Worship and Queer Identity FinalDokument8 SeitenDiva Worship and Queer Identity FinalMiguel Macalalad100% (1)
- Sounds of Baseball QuestionsDokument2 SeitenSounds of Baseball Questionsapi-235382852Noch keine Bewertungen
- Digital Booklet - Memoirs of An Imperfect Angel PDFDokument33 SeitenDigital Booklet - Memoirs of An Imperfect Angel PDFGilbertChua100% (3)
- The Me That You Don't See Chords - Laura MaranoDokument2 SeitenThe Me That You Don't See Chords - Laura MaranoElena KolevskaNoch keine Bewertungen
- Copia de EDP IST 11 2022Dokument38 SeitenCopia de EDP IST 11 2022David Quezada AguilarNoch keine Bewertungen
- The SystemDokument2 SeitenThe SystemAnkit JindalNoch keine Bewertungen
- Whittall Study of BrittenDokument16 SeitenWhittall Study of BrittenKristina AmmattilNoch keine Bewertungen
- What Song Comes To Mind Induced Song Recall Transference Countertransference in Dyadic Music Associations in Treatment and Supervision 1992 The Arts in PsychotherapyDokument8 SeitenWhat Song Comes To Mind Induced Song Recall Transference Countertransference in Dyadic Music Associations in Treatment and Supervision 1992 The Arts in PsychotherapyDonnarose OkeeneyNoch keine Bewertungen
- Dynamite: Night Drum TEA Home Stars MilkDokument2 SeitenDynamite: Night Drum TEA Home Stars MilkFernanda BurellaNoch keine Bewertungen
- Sound Waves Section Objective Type QuestionsDokument9 SeitenSound Waves Section Objective Type Questions6101998Noch keine Bewertungen
- Cant Take My Eyes Off YouDokument2 SeitenCant Take My Eyes Off YouKenneth BabieraNoch keine Bewertungen
- Ikaw at Ako Piano SheetDokument5 SeitenIkaw at Ako Piano Sheetalfred uayan100% (2)
- Beachcomber Sept.3-16, 2009Dokument40 SeitenBeachcomber Sept.3-16, 2009beachcomberdestinNoch keine Bewertungen
- Mozart's Violin Concerto No. 5 AnalysisDokument32 SeitenMozart's Violin Concerto No. 5 AnalysisBíblia CraftNoch keine Bewertungen
- Traditional Music of GaliciaDokument13 SeitenTraditional Music of GaliciaMaria RozaNoch keine Bewertungen
- Cultural ProgramDokument2 SeitenCultural ProgramMisty TortosaNoch keine Bewertungen
- Detailed Lesson Plan MusicDokument6 SeitenDetailed Lesson Plan MusicJuancho Villaflor67% (3)
- Music DegreeDokument108 SeitenMusic Degreekinda_k00lNoch keine Bewertungen
- RealLife Workbook Elementary PDFDokument20 SeitenRealLife Workbook Elementary PDFЮрий ЯницкийNoch keine Bewertungen
- Chopin As Pianist and Teacher - Mikuli 1879Dokument5 SeitenChopin As Pianist and Teacher - Mikuli 1879Carlos Montes de Oca GuerreroNoch keine Bewertungen