Das könnte Ihnen auch gefallen
- On Kernel-Target AlignmentDokument7 SeitenOn Kernel-Target AlignmentJônatas Oliveira SilvaNoch keine Bewertungen
- Kernal Methods Machine LearningDokument53 SeitenKernal Methods Machine LearningpalaniNoch keine Bewertungen
- 1 s2.0 S0898122110001951 Main PDFDokument5 Seiten1 s2.0 S0898122110001951 Main PDFSantiago UrgilesNoch keine Bewertungen
- SPE-172432-MS Guidelines For Uncertainty Assessment Using Reservoir Simulation Models For Green-And Brown-Field SituationsDokument15 SeitenSPE-172432-MS Guidelines For Uncertainty Assessment Using Reservoir Simulation Models For Green-And Brown-Field SituationsDuc Nguyen HoangNoch keine Bewertungen
- Mirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationDokument9 SeitenMirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationfurbyhaterNoch keine Bewertungen
- Machine Learning using HyperkernelsDokument8 SeitenMachine Learning using HyperkernelsMartin CalderonNoch keine Bewertungen
- Benchmark On Discretization Schemes For Anisotropic Diffusion Problems On General GridsDokument16 SeitenBenchmark On Discretization Schemes For Anisotropic Diffusion Problems On General GridsPaulo LikeyNoch keine Bewertungen
- H-P Discretisation in Three DimensionsDokument13 SeitenH-P Discretisation in Three DimensionsMario Galindo QueraltNoch keine Bewertungen
- Christophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailDokument4 SeitenChristophe Andrieu - Arnaud Doucet Bristol, BS8 1TW, UK. Cambridge, CB2 1PZ, UK. EmailNeil John AppsNoch keine Bewertungen
- The Sample Average Approximation Method Applied To Stochastic Routing Problems A Computational StudyDokument45 SeitenThe Sample Average Approximation Method Applied To Stochastic Routing Problems A Computational StudyJianli ShiNoch keine Bewertungen
- Divide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyDokument26 SeitenDivide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyTiberiu TincaNoch keine Bewertungen
- Multivariate AR Model Order Estimation With Unknown Process Order As Published in SpringerDokument11 SeitenMultivariate AR Model Order Estimation With Unknown Process Order As Published in SpringerΣΤΥΛΙΑΝΟΣ ΠΑΠΠΑΣNoch keine Bewertungen
- Research PaperDokument10 SeitenResearch PaperAaron StewartNoch keine Bewertungen
- Homework 1Dokument9 SeitenHomework 1Frank GengNoch keine Bewertungen
- Bayes linear methodology for uncertainty evaluation in reservoir forecastingDokument10 SeitenBayes linear methodology for uncertainty evaluation in reservoir forecastingrezaNoch keine Bewertungen
- Comparison of SVM, kNN, and Naive Bayes in Text ClassificationDokument10 SeitenComparison of SVM, kNN, and Naive Bayes in Text ClassificationANDRES DAVID DOMINGUEZ ROZONoch keine Bewertungen
- Topology Optimisation Example NastranDokument12 SeitenTopology Optimisation Example Nastranjbcharpe100% (1)
- Long-Term Prediction of Time Series Using State-Space ModelsDokument11 SeitenLong-Term Prediction of Time Series Using State-Space ModelsMurilo CamargosNoch keine Bewertungen
- Development of Robust Design Under Contaminated and Non-Normal DataDokument21 SeitenDevelopment of Robust Design Under Contaminated and Non-Normal DataVirojana TantibadaroNoch keine Bewertungen
- Reconstruction of Variational Iterative Method For Solving Fifth Order Caudrey-Dodd-Gibbon (CDG) EquationDokument4 SeitenReconstruction of Variational Iterative Method For Solving Fifth Order Caudrey-Dodd-Gibbon (CDG) EquationInternational Journal of Science and Engineering InvestigationsNoch keine Bewertungen
- On The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-FeedbackDokument6 SeitenOn The Existence of Stationary Optimal Policies For The Average Cost Control Problem of Linear Systems With Abstract State-Feedbackmjksh62Noch keine Bewertungen
- Validación Formulario CMM y Software Evaluación ToleranciaDokument10 SeitenValidación Formulario CMM y Software Evaluación ToleranciaAdolfo RodriguezNoch keine Bewertungen
- On The Generalized Differential Transform Method: Application To Fractional Integro-Differential EquationsDokument9 SeitenOn The Generalized Differential Transform Method: Application To Fractional Integro-Differential EquationsKanthavel ThillaiNoch keine Bewertungen
- Global convergence of trust-region SQP filter algorithmDokument25 SeitenGlobal convergence of trust-region SQP filter algorithmAndressa PereiraNoch keine Bewertungen
- Ridge 3Dokument4 SeitenRidge 3manishnegiiNoch keine Bewertungen
- Machine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingDokument15 SeitenMachine Learning For Quantitative Finance: Fast Derivative Pricing, Hedging and FittingJ Martin O.Noch keine Bewertungen
- Eserv PHPDokument30 SeitenEserv PHPRahul M SNoch keine Bewertungen
- Understanding Response Surfaces: Central Composite Designs Box-Behnken DesignsDokument3 SeitenUnderstanding Response Surfaces: Central Composite Designs Box-Behnken DesignsMonir SamirNoch keine Bewertungen
- A Dynamic Topological Sort Algorithm For Directed Acyclic GraphsDokument24 SeitenA Dynamic Topological Sort Algorithm For Directed Acyclic Graphsgallium.09.gleeNoch keine Bewertungen
- Easy Multiple Kernel Learning: January 2014Dokument7 SeitenEasy Multiple Kernel Learning: January 2014David GiraldoNoch keine Bewertungen
- CHP 1curve FittingDokument21 SeitenCHP 1curve FittingAbrar HashmiNoch keine Bewertungen
- A Tutorial on ν-Support Vector Machines: 1 An Introductory ExampleDokument29 SeitenA Tutorial on ν-Support Vector Machines: 1 An Introductory Exampleaxeman113Noch keine Bewertungen
- Stein 2011 DiffFilterDokument20 SeitenStein 2011 DiffFiltersadasdasdffNoch keine Bewertungen
- Remezr2 ArxivDokument30 SeitenRemezr2 ArxivFlorinNoch keine Bewertungen
- Bayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramaniDokument8 SeitenBayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramanifishelderNoch keine Bewertungen
- Steepest DescentDokument7 SeitenSteepest DescentstankccNoch keine Bewertungen
- Adaptive Simulation of Turbulent Flow Past A Full Car Model: Niclas Jansson Johan Hoffman Murtazo NazarovDokument7 SeitenAdaptive Simulation of Turbulent Flow Past A Full Car Model: Niclas Jansson Johan Hoffman Murtazo NazarovLuiz Fernando T. VargasNoch keine Bewertungen
- Chap 4Dokument21 SeitenChap 4ehsan_civil_62Noch keine Bewertungen
- Backtrack Programming: Jet Propulsion Laboratory, Pasadena, Calif. AbstractDokument9 SeitenBacktrack Programming: Jet Propulsion Laboratory, Pasadena, Calif. AbstractslitjewsNoch keine Bewertungen
- On Approximating Complex QuadraticDokument18 SeitenOn Approximating Complex Quadraticjiangjinghan008Noch keine Bewertungen
- Estimation of Parameters in Geotechnical Backanalysis - I. Maximum Likelihood ApproachDokument27 SeitenEstimation of Parameters in Geotechnical Backanalysis - I. Maximum Likelihood ApproachDesh DeepakNoch keine Bewertungen
- s14 CompletareDokument14 Seitens14 CompletareLaura NicoletaNoch keine Bewertungen
- An Investigation On Support Vector Clustering For Big Data in Quantum ParadigmDokument14 SeitenAn Investigation On Support Vector Clustering For Big Data in Quantum ParadigmAshish ManiNoch keine Bewertungen
- Improving The Accuracy of Computed Eigenvalues and EigenvectorsDokument23 SeitenImproving The Accuracy of Computed Eigenvalues and EigenvectorsFilipe AmaroNoch keine Bewertungen
- SAHADEB - Logistic Reg - Sessions 8-10Dokument145 SeitenSAHADEB - Logistic Reg - Sessions 8-10Writabrata BhattacharyaNoch keine Bewertungen
- Random Matrix TheoryDokument65 SeitenRandom Matrix TheoryHaider AlSabbaghNoch keine Bewertungen
- An Adaptive Nonlinear Least-Squares AlgorithmDokument21 SeitenAn Adaptive Nonlinear Least-Squares AlgorithmOleg ShirokobrodNoch keine Bewertungen
- cdd4 PDFDokument75 Seitencdd4 PDFUsman HamIdNoch keine Bewertungen
- A Sampling-and-Discarding Approach To Chance-Constrained Optimization: Feasibility and OptimalityDokument24 SeitenA Sampling-and-Discarding Approach To Chance-Constrained Optimization: Feasibility and OptimalityRaghuveer ChandraNoch keine Bewertungen
- Learning Non-Linear Combinations of Kernels: Corinna Cortes Mehryar Mohri Afshin RostamizadehDokument9 SeitenLearning Non-Linear Combinations of Kernels: Corinna Cortes Mehryar Mohri Afshin Rostamizadehartmar893077Noch keine Bewertungen
- An Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The VariablesDokument9 SeitenAn Algorithm For Quadratic Optimization With One Quadratic Constraint and Bounds On The Variablesgijs fehmersNoch keine Bewertungen
- Gauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelDokument18 SeitenGauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelcegarciaNoch keine Bewertungen
- Kernel Methods in Machine LearningDokument50 SeitenKernel Methods in Machine Learningvennela gudimellaNoch keine Bewertungen
- Solution First Point ML-HW4Dokument6 SeitenSolution First Point ML-HW4Juan Sebastian Otálora Montenegro100% (1)
- 1 s2.0 S0950705124000613 MainDokument16 Seiten1 s2.0 S0950705124000613 MainZhang WeiNoch keine Bewertungen
- Biometrika Trust, Oxford University Press BiometrikaDokument22 SeitenBiometrika Trust, Oxford University Press BiometrikaShakambari GaneshanNoch keine Bewertungen
- Introducción PiazzaDokument33 SeitenIntroducción PiazzanadiaNoch keine Bewertungen
- 2 - Ijpast 512 V16N1.170230601Dokument13 Seiten2 - Ijpast 512 V16N1.170230601Ahmed FenneurNoch keine Bewertungen
- Difference Equations in Normed Spaces: Stability and OscillationsVon EverandDifference Equations in Normed Spaces: Stability and OscillationsNoch keine Bewertungen
- Jet Airways Web Booking Eticket (Kmbfiz) - SutarDokument3 SeitenJet Airways Web Booking Eticket (Kmbfiz) - Sutarrarunr1Noch keine Bewertungen
- Refinery Process Design Notes - For IITGDokument193 SeitenRefinery Process Design Notes - For IITGLakshmi Devineni100% (3)
- Saving Private Ryan r4.1Dokument2 SeitenSaving Private Ryan r4.1rarunr1Noch keine Bewertungen
- Saving Private Ryan r4.1Dokument2 SeitenSaving Private Ryan r4.1rarunr1Noch keine Bewertungen
- Extract of CFDDokument7 SeitenExtract of CFDrarunr1Noch keine Bewertungen
- Sample Single Line Diagram For Electrical and Controls - Electrostatic CoalescerDokument1 SeiteSample Single Line Diagram For Electrical and Controls - Electrostatic Coalescerrarunr1Noch keine Bewertungen
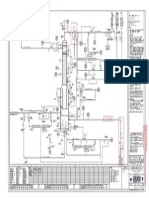
- De-Butaizer - Power Former ModelDokument1 SeiteDe-Butaizer - Power Former Modelrarunr1Noch keine Bewertungen
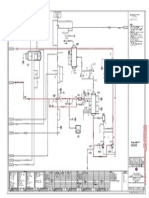
- HP Sketch For PD ModelDokument1 SeiteHP Sketch For PD Modelrarunr1Noch keine Bewertungen
- ListDokument1 SeiteListrarunr1Noch keine Bewertungen
- Exxonmobil Use OnlyDokument1 SeiteExxonmobil Use Onlyrarunr1Noch keine Bewertungen
- LSDokument1 SeiteLSrarunr1Noch keine Bewertungen
- Orifice Calc Vapor Steam GasesDokument2 SeitenOrifice Calc Vapor Steam GasesDavid Muñoz CastroNoch keine Bewertungen
- P Ric List Sal ItemsDokument10 SeitenP Ric List Sal Itemsrarunr1Noch keine Bewertungen
- 50 39 0047Dokument1 Seite50 39 0047rarunr1Noch keine Bewertungen
- 50 39 0045Dokument1 Seite50 39 0045rarunr1Noch keine Bewertungen
- 4691 50 46Dokument1 Seite4691 50 46rarunr1Noch keine Bewertungen
- Exxonmobil Use OnlyDokument1 SeiteExxonmobil Use Onlyrarunr1Noch keine Bewertungen
- Exxonmobil Use OnlyDokument1 SeiteExxonmobil Use Onlyrarunr1Noch keine Bewertungen
- 50 39 0043Dokument1 Seite50 39 0043rarunr1Noch keine Bewertungen
- Exxonmobil Use OnlyDokument1 SeiteExxonmobil Use Onlyrarunr1Noch keine Bewertungen
- FRSM-57 Effective From 02-04-2011 (Superseding FRSM-56 Dated 03-01-2011)Dokument8 SeitenFRSM-57 Effective From 02-04-2011 (Superseding FRSM-56 Dated 03-01-2011)rarunr1Noch keine Bewertungen
- Material Requisition (Top Sheet) : Miscellaneous Flanges MR Category:IDokument33 SeitenMaterial Requisition (Top Sheet) : Miscellaneous Flanges MR Category:Irarunr1Noch keine Bewertungen
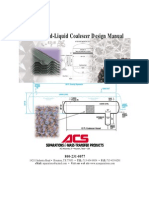
- CoalescerDokument18 SeitenCoalescer112dharmesh0% (1)
- Complete LIST 2011Dokument20 SeitenComplete LIST 2011rarunr1Noch keine Bewertungen
- 2013 Price ListsfDokument99 Seiten2013 Price Listsfrarunr1Noch keine Bewertungen
- Vacworks II CD GuideDokument2 SeitenVacworks II CD Guiderarunr1Noch keine Bewertungen
- ASME StampsDokument2 SeitenASME Stampsprad_21adNoch keine Bewertungen
- VFA #PricelistDokument117 SeitenVFA #Pricelistrarunr1Noch keine Bewertungen
- Aff - Translation of Marriage CertificateDokument1 SeiteAff - Translation of Marriage Certificaterarunr1Noch keine Bewertungen
- Material Compatibility TableDokument18 SeitenMaterial Compatibility TableADITYA_PATHAKNoch keine Bewertungen
- Transition Novels: Conrad, Lawrence and ModernismDokument6 SeitenTransition Novels: Conrad, Lawrence and ModernismAndrea GiubellinoNoch keine Bewertungen
- Taller 1. Task 1 - Ecaes ProDokument4 SeitenTaller 1. Task 1 - Ecaes ProValerin RodriguezNoch keine Bewertungen
- CaFSET (Antigua) Office Workbook - Sixth Edition - Programming Concepts Sample PagesDokument4 SeitenCaFSET (Antigua) Office Workbook - Sixth Edition - Programming Concepts Sample PagescafsetNoch keine Bewertungen
- Force Field AnalysisDokument4 SeitenForce Field AnalysisrishiNoch keine Bewertungen
- Theory of ErrorsDokument43 SeitenTheory of Errorsjaybh575Noch keine Bewertungen
- Fujifilm Ga645 FullDokument31 SeitenFujifilm Ga645 FullWork In ArtNoch keine Bewertungen
- Data Sheet 6ES7215-1AG40-0XB0: General InformationDokument10 SeitenData Sheet 6ES7215-1AG40-0XB0: General InformationautomaxNoch keine Bewertungen
- Maths Specimen Paper 1 Mark Scheme 2012Dokument8 SeitenMaths Specimen Paper 1 Mark Scheme 2012MCHNoch keine Bewertungen
- Sample Questions:: Sat Subject Test Math Level 1Dokument7 SeitenSample Questions:: Sat Subject Test Math Level 1Shiv PatelNoch keine Bewertungen
- ELT 1000 Y1-03-0259 Rev GDokument62 SeitenELT 1000 Y1-03-0259 Rev GKumaraswamy RSNoch keine Bewertungen
- Why Me?' The Problem of Chronic Pain After Surgery: JurnalDokument8 SeitenWhy Me?' The Problem of Chronic Pain After Surgery: JurnalnurismafadhliahNoch keine Bewertungen
- Statistics MCQ'S I.Com Part 2Dokument8 SeitenStatistics MCQ'S I.Com Part 2Shafique Ur Rehman82% (17)
- Forte 2010Dokument106 SeitenForte 2010Javikoo Javier Chicaiza Meza100% (1)
- Allen Fisher PoemsDokument28 SeitenAllen Fisher PoemsArkava DasNoch keine Bewertungen
- Chapter 2 - PlanningDokument31 SeitenChapter 2 - PlanningAlwiCheIsmailNoch keine Bewertungen
- Congratulations: $25 Gift VoucherDokument4 SeitenCongratulations: $25 Gift VoucherKeryn LeeNoch keine Bewertungen
- Manual Varispeed f7Dokument476 SeitenManual Varispeed f7Samir PirelaNoch keine Bewertungen
- Pulido, Jhona Mae v. (Assignment in Program Administration)Dokument3 SeitenPulido, Jhona Mae v. (Assignment in Program Administration)Jhona Mae Villanueva PulidoNoch keine Bewertungen
- Online Class Assignment VI Unit XI (LogisticsDokument3 SeitenOnline Class Assignment VI Unit XI (LogisticsAftin ArdheasariNoch keine Bewertungen
- Lesson Plan in T.L.E. - Exploratory DraftingDokument3 SeitenLesson Plan in T.L.E. - Exploratory DraftingCRIISSY100% (2)
- Monthly and Bimonthly Engineering Journals (Emerging)Dokument3 SeitenMonthly and Bimonthly Engineering Journals (Emerging)Abdul FattahNoch keine Bewertungen
- BSS Steel Guide CataloguesDokument52 SeitenBSS Steel Guide Cataloguessaber66Noch keine Bewertungen
- 4SI0 01 Rms 20170823Dokument13 Seiten4SI0 01 Rms 20170823subodya alahakoonNoch keine Bewertungen
- O Level E Math ST Theresas Convent Prelim 2019Dokument59 SeitenO Level E Math ST Theresas Convent Prelim 2019Jefferson LiinNoch keine Bewertungen
- Guide: Daily ReferenceDokument8 SeitenGuide: Daily ReferenceGalina TodorovaNoch keine Bewertungen
- Attachment 3 - List of Recommended Hospital For KOICA SP Medical Check-UpDokument36 SeitenAttachment 3 - List of Recommended Hospital For KOICA SP Medical Check-UpAugustin Tadiamba PambiNoch keine Bewertungen
- Marketing Grade 12 Gas & AbmDokument5 SeitenMarketing Grade 12 Gas & AbmGina Silvestre SolimanNoch keine Bewertungen
- 5 Senses Summative Assessment-Unit TestDokument7 Seiten5 Senses Summative Assessment-Unit Testapi-412685274100% (5)
- Detector Geam SpartDokument16 SeitenDetector Geam SpartGabrielNoch keine Bewertungen
- NCTMDokument3 SeitenNCTMziza100% (1)