Das könnte Ihnen auch gefallen
- HVAC Duct Design GuideDokument18 SeitenHVAC Duct Design GuideAshokNoch keine Bewertungen
- Fatigue AnalysisDokument23 SeitenFatigue AnalysisarnoldmarshalNoch keine Bewertungen
- G3608 Spec SheetDokument4 SeitenG3608 Spec SheetTu Pham100% (1)
- Fatigue initiation and propagationDokument21 SeitenFatigue initiation and propagationbakshiarNoch keine Bewertungen
- Strain-Life Fatigue AnalysisDokument17 SeitenStrain-Life Fatigue AnalysisDeepak ChachraNoch keine Bewertungen
- Thin Cylinder StressDokument16 SeitenThin Cylinder StressMihir Ashar0% (2)
- CompressorDokument6 SeitenCompressorAbdul MalikNoch keine Bewertungen
- CompressorDokument6 SeitenCompressorAbdul MalikNoch keine Bewertungen
- Stress ElbowsDokument8 SeitenStress Elbowssanjeettirkey0% (1)
- Pressure distribution over a cylinderDokument4 SeitenPressure distribution over a cylinderAshok YadavNoch keine Bewertungen
- Solutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsVon EverandSolutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsNoch keine Bewertungen
- Compressible flow study across varying area passagesDokument4 SeitenCompressible flow study across varying area passagesGaurav VaibhavNoch keine Bewertungen
- JCARME v1n1p17Dokument12 SeitenJCARME v1n1p17Sharat ChandraNoch keine Bewertungen
- Stress ConcentrationsDokument0 SeitenStress Concentrations777894292Noch keine Bewertungen
- Dynamic Behaviour of Hydraulic Pressure Relief ValveDokument9 SeitenDynamic Behaviour of Hydraulic Pressure Relief ValveIAEME PublicationNoch keine Bewertungen
- Effect of Temperature and Pressure On Stress of Impeller in Axial-Centrifugal Combined CompressorDokument11 SeitenEffect of Temperature and Pressure On Stress of Impeller in Axial-Centrifugal Combined CompressorBhaskar NandiNoch keine Bewertungen
- Recipiente Sub PresiuneDokument10 SeitenRecipiente Sub Presiunec_e_z_a_rNoch keine Bewertungen
- Ring ValveDokument7 SeitenRing Valvesayansaesue2514Noch keine Bewertungen
- Me301 7Dokument7 SeitenMe301 7magdyibraheemNoch keine Bewertungen
- Thin Cylinder Stress AnalysisDokument23 SeitenThin Cylinder Stress AnalysisRuban AvadiarNoch keine Bewertungen
- 2011 Springback Reduction Method For Sheet MetalDokument4 Seiten2011 Springback Reduction Method For Sheet MetalProf. Jignesh SohaliyaNoch keine Bewertungen
- Mechanical Properties of CylindersDokument6 SeitenMechanical Properties of CylindersAbdul WahabNoch keine Bewertungen
- Valvulas STEPLESSDokument10 SeitenValvulas STEPLESSHerlin MorenoNoch keine Bewertungen
- Section I of ExperimentDokument3 SeitenSection I of ExperimentGrace TongNoch keine Bewertungen
- Measurement and Control of Non-Electrical QuantitiesDokument92 SeitenMeasurement and Control of Non-Electrical Quantitiesrao asadNoch keine Bewertungen
- MOS Lab Report On Thick Walled CylinderDokument10 SeitenMOS Lab Report On Thick Walled CylinderEternalNoch keine Bewertungen
- Pressure Observer-Controller Design For Pneumatic Cylinder ActuatorsDokument10 SeitenPressure Observer-Controller Design For Pneumatic Cylinder ActuatorsSähilDhånkhårNoch keine Bewertungen
- Analitcka Studija Dinamike I Stabinosti Sigurnosnog VentilaDokument8 SeitenAnalitcka Studija Dinamike I Stabinosti Sigurnosnog VentilaMarko RisticNoch keine Bewertungen
- Thick Walled Cylinder - FeaDokument22 SeitenThick Walled Cylinder - Feagpro123Noch keine Bewertungen
- Articulo Sobre El Modelado de Un Sistema NeumaticoDokument27 SeitenArticulo Sobre El Modelado de Un Sistema NeumaticoLuis HerreraNoch keine Bewertungen
- A Study On The Stress Distri and Saddle Nition of Pressure Vessel SupportDokument4 SeitenA Study On The Stress Distri and Saddle Nition of Pressure Vessel SupportSaam SasanianNoch keine Bewertungen
- Drag Reduction On A Bluff BodyDokument22 SeitenDrag Reduction On A Bluff BodyJonathan KattNoch keine Bewertungen
- AFT Evaluating Pipe Dynamic Loads Caused by WaterhammerDokument24 SeitenAFT Evaluating Pipe Dynamic Loads Caused by WaterhammerroyalcomNoch keine Bewertungen
- Estimated vs Calculated Viscous Friction CoefficientDokument9 SeitenEstimated vs Calculated Viscous Friction CoefficientJordan MolenaarNoch keine Bewertungen
- Tensile TestingDokument13 SeitenTensile TestingAric NgNoch keine Bewertungen
- 1 s2.0 S2211812814002879 Main PDFDokument7 Seiten1 s2.0 S2211812814002879 Main PDFGholamreza MahmoodiNoch keine Bewertungen
- Fluid Mechanics II Lab Sheet 1 ExperimenDokument8 SeitenFluid Mechanics II Lab Sheet 1 ExperimenAiman HaiqalNoch keine Bewertungen
- 001 10页,Engineering Failure Analysis论文,Loosening-resistance Evaluation of Double-nut Tightening Method and Spring Washer by Three-dimensional Finite Element AnalysisDokument10 Seiten001 10页,Engineering Failure Analysis论文,Loosening-resistance Evaluation of Double-nut Tightening Method and Spring Washer by Three-dimensional Finite Element Analysiscary01Noch keine Bewertungen
- IADC/SPE-178831-MS Effect of Transient Surge Pressure On Stress Distribution Around Directional WellboresDokument17 SeitenIADC/SPE-178831-MS Effect of Transient Surge Pressure On Stress Distribution Around Directional WellboresqjbsexNoch keine Bewertungen
- Studies of Compression Corner Flowfields Using THREE Turbulent ModelsDokument7 SeitenStudies of Compression Corner Flowfields Using THREE Turbulent Modelsarnalt_stalinNoch keine Bewertungen
- Experiment 5 Pressure Distribution On Circular Cylinder and AirfoilDokument8 SeitenExperiment 5 Pressure Distribution On Circular Cylinder and AirfoilMarilynYunLing50% (2)
- Boundary LayersDokument15 SeitenBoundary LayersRo Win100% (1)
- Mathematical model of pneumatic proportional valve flow and mechanicsDokument6 SeitenMathematical model of pneumatic proportional valve flow and mechanicsgladiolus86Noch keine Bewertungen
- MosreportonprogressDokument7 SeitenMosreportonprogressEternalNoch keine Bewertungen
- Mapping instantaneous flow to calculate reliable impact valve velocityDokument8 SeitenMapping instantaneous flow to calculate reliable impact valve velocitydrdreghNoch keine Bewertungen
- Stress-Strain Test 2015 SpringDokument6 SeitenStress-Strain Test 2015 SpringRich GarrNoch keine Bewertungen
- Failure Analysis of Industrial Ball Mill Girth GearDokument6 SeitenFailure Analysis of Industrial Ball Mill Girth GearJaime GutierrezNoch keine Bewertungen
- Hook's Law Experiment Physics 1Dokument3 SeitenHook's Law Experiment Physics 1bingthekingNoch keine Bewertungen
- Determination of Stress Concentration FactorsDokument5 SeitenDetermination of Stress Concentration FactorsEduardo Felippe de SouzaNoch keine Bewertungen
- Session 11Dokument21 SeitenSession 11Kais Garchi CasalNoch keine Bewertungen
- Computerized Thick CylinderDokument11 SeitenComputerized Thick CylinderMary TiltNoch keine Bewertungen
- Analysis of Cooling Gas Compressors Discharge Silencer: Dr. S. B. Wadkar, Viraj GhogreDokument7 SeitenAnalysis of Cooling Gas Compressors Discharge Silencer: Dr. S. B. Wadkar, Viraj GhogreresearchinventyNoch keine Bewertungen
- Strain-Life Fatigue Analysis ToolDokument14 SeitenStrain-Life Fatigue Analysis ToolKALIDASS DNoch keine Bewertungen
- Aero 2Dokument16 SeitenAero 2sara.adnan2013Noch keine Bewertungen
- Unsteady Wave Structure Near Separation in A Mach 5 Compression Ramp InteractionDokument8 SeitenUnsteady Wave Structure Near Separation in A Mach 5 Compression Ramp Interaction王崇岳Noch keine Bewertungen
- Sca1989 08Dokument16 SeitenSca1989 08Rosa K Chang HNoch keine Bewertungen
- Modern Sensors HandbookVon EverandModern Sensors HandbookPavel RipkaBewertung: 5 von 5 Sternen5/5 (1)
- Basics of Pressure RegulatorDokument7 SeitenBasics of Pressure RegulatornvhcycoukNoch keine Bewertungen
- Wound SpiralDokument2 SeitenWound SpiralMircea Dan StanciuNoch keine Bewertungen
- Envelope Analysis For Rolling Element BearingDokument8 SeitenEnvelope Analysis For Rolling Element Bearingnmgurav100% (1)
- Design ConditionDokument1 SeiteDesign ConditionTu PhamNoch keine Bewertungen
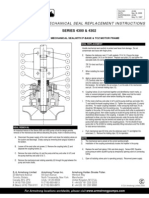
- Mechanical Seal Replacement InstructionsDokument1 SeiteMechanical Seal Replacement InstructionsGiorgio FerNoch keine Bewertungen
- ReadmeDokument1 SeiteReadmeTu PhamNoch keine Bewertungen
- Design ConditionDokument1 SeiteDesign ConditionPHAM THANH TUNoch keine Bewertungen
- ES3015-0608-Grouting & Anchor Bolt RequirementsDokument4 SeitenES3015-0608-Grouting & Anchor Bolt RequirementsTu PhamNoch keine Bewertungen
- QueryDokument2 SeitenQueryTu PhamNoch keine Bewertungen
- 74 Tong Hop Cham Diem at Quy I-201503201Dokument3 Seiten74 Tong Hop Cham Diem at Quy I-201503201Tu PhamNoch keine Bewertungen
- CONG TY DICH VU KHI LONGDokument1 SeiteCONG TY DICH VU KHI LONGTu PhamNoch keine Bewertungen
- In Biên LaiDokument2 SeitenIn Biên LaiTu PhamNoch keine Bewertungen
- Natural Gas Engine Overhaul (In-Frame) 50000 Service Hours - 1Dokument1 SeiteNatural Gas Engine Overhaul (In-Frame) 50000 Service Hours - 1Tu PhamNoch keine Bewertungen
- Balancing Speed Selection PDFDokument0 SeitenBalancing Speed Selection PDFzaidbismaNoch keine Bewertungen
- Gas Compressor Workshop Table of ContentsDokument1 SeiteGas Compressor Workshop Table of ContentsTu PhamNoch keine Bewertungen
- 1998 03 4 Kmecl eDokument4 Seiten1998 03 4 Kmecl eTu PhamNoch keine Bewertungen
- Force Feed LubricationDokument1 SeiteForce Feed LubricationTu PhamNoch keine Bewertungen
- Air Cooled Exchangers IncDokument6 SeitenAir Cooled Exchangers IncTu PhamNoch keine Bewertungen
- Loctite Retaining Application GuideDokument2 SeitenLoctite Retaining Application GuideTu PhamNoch keine Bewertungen
- PerkinsDokument4 SeitenPerkinsTu Pham100% (1)
- 550 CV 315 Xu Ly Kien Nghi Tai BB Dieu Tra Su Co So 01 Va 02.BBDT - 1Dokument16 Seiten550 CV 315 Xu Ly Kien Nghi Tai BB Dieu Tra Su Co So 01 Va 02.BBDT - 1Tu PhamNoch keine Bewertungen
- Click Wrench RepairDokument31 SeitenClick Wrench RepairTu PhamNoch keine Bewertungen
- Dampening Plate in Reciprocating Compressor PDFDokument8 SeitenDampening Plate in Reciprocating Compressor PDFTu PhamNoch keine Bewertungen
- 1998 03 4 Kmecl eDokument4 Seiten1998 03 4 Kmecl eTu PhamNoch keine Bewertungen
- Roll BalancingDokument8 SeitenRoll BalancingTu PhamNoch keine Bewertungen
- 1998 03 4 Kmecl eDokument4 Seiten1998 03 4 Kmecl eTu PhamNoch keine Bewertungen