Das könnte Ihnen auch gefallen
- MATHEMATICAL FUNDAMENTALSDokument44 SeitenMATHEMATICAL FUNDAMENTALSAnonymous DuA3jEqUqNoch keine Bewertungen
- Siemens - Motor SpecificationsDokument50 SeitenSiemens - Motor SpecificationsArtifoxNoch keine Bewertungen
- Load CalculationsDokument5 SeitenLoad Calculationsarif_rubinNoch keine Bewertungen
- SdarticleDokument9 SeitenSdarticleSachin KumarNoch keine Bewertungen
- Power Distribution System Observability With Smart Meter DataDokument5 SeitenPower Distribution System Observability With Smart Meter Datadan_intel6735Noch keine Bewertungen
- Optimization Based State Feedback Control Design For Impulse Elimination in Descriptor SystemsDokument5 SeitenOptimization Based State Feedback Control Design For Impulse Elimination in Descriptor SystemsAvinash KumarNoch keine Bewertungen
- Ait AllDokument83 SeitenAit AllramasaiNoch keine Bewertungen
- Design of A Non-Linear Hybrid Car Suspension System Using Neural NetworksDokument10 SeitenDesign of A Non-Linear Hybrid Car Suspension System Using Neural NetworksEmir AcevedoNoch keine Bewertungen
- Strongly Regular GraphDokument35 SeitenStrongly Regular GraphScout EdwardsNoch keine Bewertungen
- InTech-Control Designs For Linear Systems Using State Derivative FeedbackDokument29 SeitenInTech-Control Designs For Linear Systems Using State Derivative FeedbackManmatha KrishnanNoch keine Bewertungen
- A Robust Observer-Based Controller Design For Uncertain Discrete-Time SystemsDokument5 SeitenA Robust Observer-Based Controller Design For Uncertain Discrete-Time SystemsIsmail ErrachidNoch keine Bewertungen
- 2 - Ijpast 512 V16N1.170230601Dokument13 Seiten2 - Ijpast 512 V16N1.170230601Ahmed FenneurNoch keine Bewertungen
- Sliding Mode Control Based Global Chaos SynchronizDokument7 SeitenSliding Mode Control Based Global Chaos SynchronizPrakash Duraisamy CITNoch keine Bewertungen
- Paper 23 PDFDokument9 SeitenPaper 23 PDFking kjNoch keine Bewertungen
- New Chaotic Binary Sequences With Good Correlation Property Using Logistic MapsDokument6 SeitenNew Chaotic Binary Sequences With Good Correlation Property Using Logistic MapsInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- Gabrys Bargiela 1996 Int SE CL Water Systems PDFDokument5 SeitenGabrys Bargiela 1996 Int SE CL Water Systems PDFmaheshnagarkarNoch keine Bewertungen
- Matrices, Determinants & Linear SystemsDokument30 SeitenMatrices, Determinants & Linear SystemssilviubogaNoch keine Bewertungen
- EEET 3046 Control Systems (2020) : Lecture 10: Controllability and Controller Design by Pole PlacementDokument30 SeitenEEET 3046 Control Systems (2020) : Lecture 10: Controllability and Controller Design by Pole Placementbig NazNoch keine Bewertungen
- MIT Numerical Fluid Mechanics Problem SetDokument5 SeitenMIT Numerical Fluid Mechanics Problem SetAman JalanNoch keine Bewertungen
- Stabilization of Nonlinear SystemDokument7 SeitenStabilization of Nonlinear SystemSaht Park Ulyshi AhaanNoch keine Bewertungen
- An1 Derivat - Ro BE 2 71 Mathematical AspectsDokument8 SeitenAn1 Derivat - Ro BE 2 71 Mathematical Aspectsvlad_ch93Noch keine Bewertungen
- STABILITY ANALYSISDokument11 SeitenSTABILITY ANALYSISSuganthiVasanNoch keine Bewertungen
- Advanced N. Analysis MSC Mech. & Civil EngDokument4 SeitenAdvanced N. Analysis MSC Mech. & Civil EngVpn sarahNoch keine Bewertungen
- State Space Representation, Observability, ControllabilityDokument4 SeitenState Space Representation, Observability, ControllabilityHaris BaigNoch keine Bewertungen
- Numerical Analysis Assignment HelpDokument14 SeitenNumerical Analysis Assignment HelpMath Homework SolverNoch keine Bewertungen
- Derivation of Stiffness and Flexibility For Rods and BeamsDokument9 SeitenDerivation of Stiffness and Flexibility For Rods and BeamsNumair Ahmad FarjanNoch keine Bewertungen
- Feature Selection For Nonlinear Kernel Support Vector MachinesDokument6 SeitenFeature Selection For Nonlinear Kernel Support Vector MachinesSelly Anastassia Amellia KharisNoch keine Bewertungen
- LAforAIML 2Dokument3 SeitenLAforAIML 2Abhideep KhareNoch keine Bewertungen
- 1 s2.0 S0895717710001743 MainDokument7 Seiten1 s2.0 S0895717710001743 MainAhmad DiabNoch keine Bewertungen
- Sliding Mode Observer-Based Fault Reconstruction For Uncertain Linear SystemsDokument9 SeitenSliding Mode Observer-Based Fault Reconstruction For Uncertain Linear SystemsVicente Borja JaimesNoch keine Bewertungen
- Applying Structured Singular Values and A New LQR Design To Robust Decentralized Power System Load Frequency ControlDokument5 SeitenApplying Structured Singular Values and A New LQR Design To Robust Decentralized Power System Load Frequency ControlNoa Noa ReyNoch keine Bewertungen
- Functions and ApplicationsDokument30 SeitenFunctions and Applicationslala landNoch keine Bewertungen
- 1 s2.0 S0950705124000613 MainDokument16 Seiten1 s2.0 S0950705124000613 MainZhang WeiNoch keine Bewertungen
- Fourier-Series Approach To Model Order Reduction and Controller Interaction Analysis of Large-Scale Power System ModelsDokument9 SeitenFourier-Series Approach To Model Order Reduction and Controller Interaction Analysis of Large-Scale Power System ModelsArvind Kumar PrajapatiNoch keine Bewertungen
- Alternative Karnik-Mendel Algorithm For Interval Type-2 Type-ReductionDokument8 SeitenAlternative Karnik-Mendel Algorithm For Interval Type-2 Type-ReductionGEDLERGNoch keine Bewertungen
- Shell Stress Analysis Using Variational MethodDokument4 SeitenShell Stress Analysis Using Variational MethodMOHAMMED JAWADNoch keine Bewertungen
- EE 542 HEV Assignment 1Dokument2 SeitenEE 542 HEV Assignment 1Kêšhãv ŠîñghNoch keine Bewertungen
- Analogue Realizations of Fractional-Order ControllersDokument16 SeitenAnalogue Realizations of Fractional-Order Controllerstarunag72801Noch keine Bewertungen
- Comparing Autoregressive Moving Average (ARMA) Coefficients Determination Using Artificial Neural Networks With Other TechniquesDokument6 SeitenComparing Autoregressive Moving Average (ARMA) Coefficients Determination Using Artificial Neural Networks With Other Techniquesamru_rzlNoch keine Bewertungen
- State Variable Approach Explained for Continuous Systems AnalysisDokument76 SeitenState Variable Approach Explained for Continuous Systems AnalysisNina ButtNoch keine Bewertungen
- Systems of Linear Equations ApplicationsDokument26 SeitenSystems of Linear Equations ApplicationsEli LoneyNoch keine Bewertungen
- Solving systems of linear equationsDokument25 SeitenSolving systems of linear equationsmvdurgadeviNoch keine Bewertungen
- Structural Analisys 10Dokument6 SeitenStructural Analisys 10RaiWolf FANoch keine Bewertungen
- Systems of Linear EquationsDokument26 SeitenSystems of Linear EquationsKarylle AquinoNoch keine Bewertungen
- Modeling Analysis and Simulation of 2-DOF Robotic ManipulatorDokument4 SeitenModeling Analysis and Simulation of 2-DOF Robotic ManipulatorAum4Eng HelpNoch keine Bewertungen
- Backlash Compensation in Nonlinear Systems Using Dynamic Inversion by Neural NetworksDokument12 SeitenBacklash Compensation in Nonlinear Systems Using Dynamic Inversion by Neural NetworksrodrigoipnNoch keine Bewertungen
- Chapter - 3 TestDokument3 SeitenChapter - 3 Testshuvroo khanNoch keine Bewertungen
- Determinants (CTD) : Cramer's Rule (Section 2.3)Dokument9 SeitenDeterminants (CTD) : Cramer's Rule (Section 2.3)asahNoch keine Bewertungen
- Libro Fasshauer Numerico AvanzadoDokument151 SeitenLibro Fasshauer Numerico AvanzadoCarlysMendozaamorNoch keine Bewertungen
- Synchronization of Fractional Chaotic Systems Via Fractional-Order Adaptive ControllerDokument5 SeitenSynchronization of Fractional Chaotic Systems Via Fractional-Order Adaptive ControllermusheermusheerNoch keine Bewertungen
- Problem Set 3: Notes: Please Provide A Hard-Copy (Handwritten/printed) of Your Solutions. Please Do Not Print Your CodesDokument5 SeitenProblem Set 3: Notes: Please Provide A Hard-Copy (Handwritten/printed) of Your Solutions. Please Do Not Print Your CodesAman JalanNoch keine Bewertungen
- Exercises 03Dokument5 SeitenExercises 03davyjones1147Noch keine Bewertungen
- Degrees of Freedom PDFDokument7 SeitenDegrees of Freedom PDFAshleyNoch keine Bewertungen
- A Control Perspective For Centralized and Distributed Convex OptimizationDokument6 SeitenA Control Perspective For Centralized and Distributed Convex Optimizationzxfeng168163.comNoch keine Bewertungen
- Mass, Stiffness, and Damping Matrices From Measured Modal ParametersDokument5 SeitenMass, Stiffness, and Damping Matrices From Measured Modal ParametersOscar Daga CaravantesNoch keine Bewertungen
- Assignment 2Dokument7 SeitenAssignment 2ue06037Noch keine Bewertungen
- 2 1D Finite Elements For Axially Loaded Rods: σ = Eε = E du dxDokument34 Seiten2 1D Finite Elements For Axially Loaded Rods: σ = Eε = E du dxEleonora InghelleriNoch keine Bewertungen
- CSC3113 Lec01Dokument15 SeitenCSC3113 Lec01S M AkashNoch keine Bewertungen
- Ellipsoid PotentialDokument18 SeitenEllipsoid PotentialEduardoHenriquezNoch keine Bewertungen
- Block Diagram Algebra and Transfer FunctionDokument15 SeitenBlock Diagram Algebra and Transfer FunctionPexianNoch keine Bewertungen
- EXP (5) - State Variable Feedback DesignDokument7 SeitenEXP (5) - State Variable Feedback Designبدون اسمNoch keine Bewertungen
- MRP LVSGR 15 Dec 08Dokument56 SeitenMRP LVSGR 15 Dec 08kodandaramNoch keine Bewertungen
- Ac DriveDokument32 SeitenAc DrivedenramrNoch keine Bewertungen
- PLC Fundamental TheoryDokument97 SeitenPLC Fundamental Theorykodandaram100% (2)
- Fundamental PLC TRG ScheduleDokument8 SeitenFundamental PLC TRG SchedulekodandaramNoch keine Bewertungen
- Basics of AC Drives 2Dokument20 SeitenBasics of AC Drives 2kodandaramNoch keine Bewertungen
- Contactor BasicsDokument22 SeitenContactor Basicskodandaram100% (4)
- Microprocessor Based Overload Relay 3RB12Dokument11 SeitenMicroprocessor Based Overload Relay 3RB12kodandaramNoch keine Bewertungen
- Motor StandardsDokument17 SeitenMotor Standardskodandaram100% (4)
- Motor StandardsDokument17 SeitenMotor Standardskodandaram100% (4)
- Handbook of AC Servo SystemsDokument42 SeitenHandbook of AC Servo Systemskodandaram100% (1)
- Acd 1Dokument36 SeitenAcd 1lvb123Noch keine Bewertungen
- Motor Maintenance FoliosDokument16 SeitenMotor Maintenance Folioskodandaram100% (1)
- Microprocessor Based Overload Relay 3RB12Dokument11 SeitenMicroprocessor Based Overload Relay 3RB12kodandaramNoch keine Bewertungen
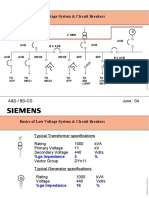
- Basics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04Dokument17 SeitenBasics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04kodandaram100% (1)
- Basics of AC Drives 3Dokument28 SeitenBasics of AC Drives 3kodandaramNoch keine Bewertungen
- Ge - 06Dokument1 SeiteGe - 06kodandaramNoch keine Bewertungen
- Baba ResumeDokument2 SeitenBaba ResumekodandaramNoch keine Bewertungen
- Teaching Load Frequency Control Using Matlab and SimulinkDokument38 SeitenTeaching Load Frequency Control Using Matlab and SimulinkkodandaramNoch keine Bewertungen
- Analysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementsDokument7 SeitenAnalysis of Load Frequency Control Dynamics Based On Multiple Synchronized Phasor MeasurementskodandaramNoch keine Bewertungen
- Siemens AC Motors BOOKDokument39 SeitenSiemens AC Motors BOOKPedada AdityaNoch keine Bewertungen
- Load-Frequency Regulation Under0-06Dokument9 SeitenLoad-Frequency Regulation Under0-06kodandaram100% (1)
- Gordon Woodward: City of Coventry Single and Two Phase Generation and DistributionDokument4 SeitenGordon Woodward: City of Coventry Single and Two Phase Generation and DistributionkodandaramNoch keine Bewertungen
- Kothariapp2000 06Dokument6 SeitenKothariapp2000 06kodandaramNoch keine Bewertungen
- Abstract, N - Kishor-06Dokument3 SeitenAbstract, N - Kishor-06kodandaramNoch keine Bewertungen
- Magnetic Fluid and Nanoparticle Applications To NanotechnologyDokument6 SeitenMagnetic Fluid and Nanoparticle Applications To NanotechnologykodandaramNoch keine Bewertungen
- Resume (Core)Dokument3 SeitenResume (Core)kodandaramNoch keine Bewertungen
- Application of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemDokument4 SeitenApplication of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemkodandaramNoch keine Bewertungen
- The Prospects of Nanotechnology in Electrical Power Engineering PDFDokument4 SeitenThe Prospects of Nanotechnology in Electrical Power Engineering PDFMohamed Abdel Aziz DarwishNoch keine Bewertungen
- (Architecture Ebook) Alvar Aalto, Alvar Aalto and The Bio-ArchitectureDokument5 Seiten(Architecture Ebook) Alvar Aalto, Alvar Aalto and The Bio-Architecturepooh86poohNoch keine Bewertungen
- Stepper Motor Driven Solar Tracker SystemDokument4 SeitenStepper Motor Driven Solar Tracker SystemFAHMY RINANDA SAPUTRI (066629)Noch keine Bewertungen
- Cement Chapter 4Dokument11 SeitenCement Chapter 4shani5573100% (2)
- Analysis of Wood Bending PropertiesDokument11 SeitenAnalysis of Wood Bending Propertiesprasanna020391100% (1)
- Sample Lesson Plan in Science V Using Explicit InstructionDokument6 SeitenSample Lesson Plan in Science V Using Explicit InstructionKrimson Mike DolorzoNoch keine Bewertungen
- A Kinetic Study of The Reduction of Colloidal Manganese Dioxide by Oxalic AcidDokument10 SeitenA Kinetic Study of The Reduction of Colloidal Manganese Dioxide by Oxalic AcidDarine Mahfouf Ep BoucharebNoch keine Bewertungen
- Crisfield M A Vol 2 Non-Linear Finite Element Analysis of Solids and Structures Advanced TopicsDokument509 SeitenCrisfield M A Vol 2 Non-Linear Finite Element Analysis of Solids and Structures Advanced TopicsIffat Siddqiue0% (1)
- Pore Structure of Air-Entrained Hardened Cement PasteDokument9 SeitenPore Structure of Air-Entrained Hardened Cement Paste1mattelliottNoch keine Bewertungen
- Math II Tutorial 1Dokument2 SeitenMath II Tutorial 1devang_siNoch keine Bewertungen
- SosthenesDokument396 SeitenSosthenesAthiesh KumarNoch keine Bewertungen
- Module - 6 - Slides - Part 1 PDFDokument124 SeitenModule - 6 - Slides - Part 1 PDFvarniktpNoch keine Bewertungen
- G.D.GOENKA PUBLIC SCHOOL CLASS 10 CHEMISTRY CHAPTER 2 ACIDS BASES SALTS ASSIGNMENTDokument3 SeitenG.D.GOENKA PUBLIC SCHOOL CLASS 10 CHEMISTRY CHAPTER 2 ACIDS BASES SALTS ASSIGNMENTvikas aggarwal100% (1)
- Calcul Evaltn-Embankments Reinforced With geocells-FEM-2015Dokument14 SeitenCalcul Evaltn-Embankments Reinforced With geocells-FEM-2015Rakesh KapoorNoch keine Bewertungen
- Vibration Case HistoriesDokument56 SeitenVibration Case HistoriesanuprajaNoch keine Bewertungen
- Berco Product FA 6E: General Information Fa 6E 12040002 Idler Group, With Tensioning Device Not Integrated inDokument1 SeiteBerco Product FA 6E: General Information Fa 6E 12040002 Idler Group, With Tensioning Device Not Integrated inrameshNoch keine Bewertungen
- Group Plant BrochureDokument52 SeitenGroup Plant BrochureAnonymous AdofXEYAgE100% (1)
- Polar Moment of Inertia ExperimentDokument17 SeitenPolar Moment of Inertia Experimentsohail parachaNoch keine Bewertungen
- Soil Settlement ElasticityDokument10 SeitenSoil Settlement ElasticityAnonymous aZrC1EZNoch keine Bewertungen
- POMFriction AssessmentDokument11 SeitenPOMFriction AssessmentJoãoAraújoNoch keine Bewertungen
- Computer Graphics and AnimationDokument2 SeitenComputer Graphics and AnimationManoj PrasadNoch keine Bewertungen
- Properties of CompoundsDokument15 SeitenProperties of CompoundsPrasad YarraNoch keine Bewertungen
- Sedimentary Geology 188-189 (2006) 357 - 378Dokument22 SeitenSedimentary Geology 188-189 (2006) 357 - 378dvrmtNoch keine Bewertungen
- Diaphragm Design PDFDokument50 SeitenDiaphragm Design PDFManoj JaiswalNoch keine Bewertungen
- Separation and Purification of Triacylglycerols From Nyamplung (Calophyllum Inophyllum) Oil by Batchwise Solvent ExtractionDokument24 SeitenSeparation and Purification of Triacylglycerols From Nyamplung (Calophyllum Inophyllum) Oil by Batchwise Solvent ExtractionAfifatul JannahNoch keine Bewertungen
- Tuned Liquid Dampers for Efficient Tall Building DesignDokument9 SeitenTuned Liquid Dampers for Efficient Tall Building Designsukanya12345Noch keine Bewertungen
- Math at Grade 4Dokument9 SeitenMath at Grade 4api-239942675Noch keine Bewertungen
- D Mec Frac Fatigue Part IIDokument38 SeitenD Mec Frac Fatigue Part IIsure516vNoch keine Bewertungen
- Carrfoster 2Dokument5 SeitenCarrfoster 2SauravNoch keine Bewertungen
- How retinal adaptation maintains visual perception despite illumination changesDokument1 SeiteHow retinal adaptation maintains visual perception despite illumination changesAkicaNoch keine Bewertungen