Das könnte Ihnen auch gefallen
- 5.-NXT Spike Buillding PDFDokument65 Seiten5.-NXT Spike Buillding PDFRosendo XrNoch keine Bewertungen
- Active LmeDokument8 SeitenActive Lme0505900399Noch keine Bewertungen
- GEN II EV3 Simple Simon Soccer Player and Goalie HTDokument16 SeitenGEN II EV3 Simple Simon Soccer Player and Goalie HTrezal yusoffNoch keine Bewertungen
- Built Tribot100Dokument59 SeitenBuilt Tribot100Felipe MartinezNoch keine Bewertungen
- NXT Emulator Guide PDFDokument30 SeitenNXT Emulator Guide PDFcarlo2563Noch keine Bewertungen
- NXTway-GS Building InstructionsDokument17 SeitenNXTway-GS Building InstructionsVinay SandeepNoch keine Bewertungen
- NXT Ballbot Building Instructions PDFDokument28 SeitenNXT Ballbot Building Instructions PDFzohaibshabirNoch keine Bewertungen
- Build 229-Piece Lego Robot Model with Step-by-Step InstructionsDokument89 SeitenBuild 229-Piece Lego Robot Model with Step-by-Step InstructionsEduardo SocasNoch keine Bewertungen
- Beginning NXT Programming WorkshopDokument102 SeitenBeginning NXT Programming Workshopczar117100% (1)
- LEGO Mindstorms NXT 2.0 For Teens (2011)Dokument337 SeitenLEGO Mindstorms NXT 2.0 For Teens (2011)JAVIER ALONSO MURILLO MURILLONoch keine Bewertungen
- Ev3 User Guide enDokument69 SeitenEv3 User Guide enpierdonneNoch keine Bewertungen
- Galaxy Robo SpiderDokument69 SeitenGalaxy Robo SpideretwinningNoch keine Bewertungen
- 8700 - Expert Builder Power PackDokument3 Seiten8700 - Expert Builder Power PackabigarxesNoch keine Bewertungen
- Formula Ev3: A Racing Robot: Race Car, Shown in Figure 12-1Dokument8 SeitenFormula Ev3: A Racing Robot: Race Car, Shown in Figure 12-1Juan GomezNoch keine Bewertungen
- Sonda Espacial WE - DoDokument44 SeitenSonda Espacial WE - DoEpicSaxGuyNoch keine Bewertungen
- Lego WeDo Worksheet - Lego FanDokument2 SeitenLego WeDo Worksheet - Lego FanEl Blog de la Profe Isa0% (1)
- Parts List: Qty Color Description Qty Color DescriptionDokument4 SeitenParts List: Qty Color Description Qty Color DescriptionGerald Ochoa PerezNoch keine Bewertungen
- Secret Invention: Model NameDokument55 SeitenSecret Invention: Model NameetwinningNoch keine Bewertungen
- Appendix 2-LEGO Mind Storms NXT Keypad SchematicDokument1 SeiteAppendix 2-LEGO Mind Storms NXT Keypad SchematicAlfon DeLerínNoch keine Bewertungen
- Rem Bot: Building InstructionsDokument24 SeitenRem Bot: Building Instructionsandreys12Noch keine Bewertungen
- 8285 Modification PackageDokument21 Seiten8285 Modification Packagektbflyfish100% (1)
- Technical Instructions On Building Lego Crane TruckDokument84 SeitenTechnical Instructions On Building Lego Crane TruckocuibusNoch keine Bewertungen
- Lego NXT Mindstorms Bonus Model Classic ClockDokument64 SeitenLego NXT Mindstorms Bonus Model Classic ClockandrewheNoch keine Bewertungen
- 1411 Steampunk Walker 241 Pieces: A Custom Model Design by Jason AllemannDokument43 Seiten1411 Steampunk Walker 241 Pieces: A Custom Model Design by Jason AllemannAnonymous RMflbEATRWNoch keine Bewertungen
- Robot Arm: Building InstructionsDokument33 SeitenRobot Arm: Building InstructionsjjaviertrevinoNoch keine Bewertungen
- With-Conveyor-Belt-24v: WebsiteDokument2 SeitenWith-Conveyor-Belt-24v: Websiteamina mohammedNoch keine Bewertungen
- Ev3 User GuideDokument69 SeitenEv3 User GuideLucas BatistaNoch keine Bewertungen
- Lego Mindstorm Smart BricksDokument28 SeitenLego Mindstorm Smart BricksJohn Paul ReyesNoch keine Bewertungen
- Sanet - ST - 2023!03!01 The Ultimate Guide To LEGODokument100 SeitenSanet - ST - 2023!03!01 The Ultimate Guide To LEGOHusam SalehNoch keine Bewertungen
- Virtual Brick Teachers GuideDokument36 SeitenVirtual Brick Teachers GuideandreNoch keine Bewertungen
- Ev3micropythonv100 PDFDokument59 SeitenEv3micropythonv100 PDFChettamilsNoch keine Bewertungen
- Direct Drive Mantis InstructionsDokument22 SeitenDirect Drive Mantis InstructionsTato LeonNoch keine Bewertungen
- © 2006 LEGO CompanyDokument48 Seiten© 2006 LEGO Companyandslpz0Noch keine Bewertungen
- Built Grand Four Belt Rover100Dokument93 SeitenBuilt Grand Four Belt Rover100Felipe Martinez67% (3)
- Robotics With Enchanting 1.1 PDFDokument53 SeitenRobotics With Enchanting 1.1 PDFMiguel MendezNoch keine Bewertungen
- LEGO Mindstorms Education Kit 9797 User GuideDokument66 SeitenLEGO Mindstorms Education Kit 9797 User Guidewsecomp100% (1)
- The Unofficial Lego Technic Builder'S Guide: What Will You Build?Dokument1 SeiteThe Unofficial Lego Technic Builder'S Guide: What Will You Build?Isaac Hancock0% (2)
- Sensor en PDFDokument17 SeitenSensor en PDFAlimamy KoromaNoch keine Bewertungen
- Lego BasicsDokument39 SeitenLego BasicsPio_ChronicleNoch keine Bewertungen
- Robotics in Education Ejournal: ContentsDokument28 SeitenRobotics in Education Ejournal: ContentsΑνδρέας ΜήταλαςNoch keine Bewertungen
- The Lego Mindstorms Ev3 Discovery BookDokument5 SeitenThe Lego Mindstorms Ev3 Discovery BookPrapussorn Sresanunwong13% (8)
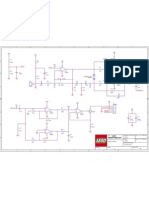
- Appendix 4-LEGO Mind Storms NXT Sound Sensor Hardware SchematicDokument1 SeiteAppendix 4-LEGO Mind Storms NXT Sound Sensor Hardware SchematicAlfon DeLerín100% (1)
- The Lego Technic Idea Book: Wheeled Wonders - Yoshihito IsogawaDokument4 SeitenThe Lego Technic Idea Book: Wheeled Wonders - Yoshihito Isogawadufysico0% (1)
- 10 Cool Lego Mindstorms Dark Side Robots Transports and Creatures Amazing Projects You Can Build in Under An HourDokument257 Seiten10 Cool Lego Mindstorms Dark Side Robots Transports and Creatures Amazing Projects You Can Build in Under An HourLuciely De Oliveira Silva50% (2)
- Lego Mind Storms Ev 3 Programming BasicsDokument29 SeitenLego Mind Storms Ev 3 Programming Basicstushar singh100% (1)
- 9695 Belt-Driven Colour Sorter100Dokument90 Seiten9695 Belt-Driven Colour Sorter100Sam Chumbas100% (1)
- Lego Digital DesignerDokument77 SeitenLego Digital DesignerRamiro BastarNoch keine Bewertungen
- WeDo 2 Teachers GuideDokument217 SeitenWeDo 2 Teachers GuideMejri ImedNoch keine Bewertungen
- LEGO Theory and Practice for Creative MediaDokument62 SeitenLEGO Theory and Practice for Creative MediaMichael PoonNoch keine Bewertungen
- Core Set Product Sheet PDFDokument2 SeitenCore Set Product Sheet PDFCarlos Roman ZarzaNoch keine Bewertungen
- Build A Robot: Prime Lessons Prime LessonsDokument7 SeitenBuild A Robot: Prime Lessons Prime LessonsRamaDinakaranNoch keine Bewertungen
- Edumóvil: Programando NXT Con NXCDokument72 SeitenEdumóvil: Programando NXT Con NXCJ'obbanii StgoNoch keine Bewertungen
- Programming LEGO® EV3 My Blocks: Teaching Concepts and Preparing for FLL® CompetitionVon EverandProgramming LEGO® EV3 My Blocks: Teaching Concepts and Preparing for FLL® CompetitionNoch keine Bewertungen
- The LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionVon EverandThe LEGO Arduino Cookbook: Expanding the Realm of MINDSTORMS EV3 InventionNoch keine Bewertungen
- EMSOFT 2009 Mindstorms TutorialDokument89 SeitenEMSOFT 2009 Mindstorms TutorialeeindustrialNoch keine Bewertungen
- Testing The Brand New Chinese Image-to-Video I2VGen-XLDokument23 SeitenTesting The Brand New Chinese Image-to-Video I2VGen-XLIrakliNoch keine Bewertungen
- Lego JavaDokument98 SeitenLego JavaPolunomynalsNoch keine Bewertungen
- Computer Vision Sandbox - CodeProjectDokument25 SeitenComputer Vision Sandbox - CodeProjectgfgomesNoch keine Bewertungen
- gOpenMol3 00Dokument209 SeitengOpenMol3 00Kristhian Alcantar MedinaNoch keine Bewertungen
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Dokument27 SeitenSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNoch keine Bewertungen
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Dokument27 SeitenSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNoch keine Bewertungen
- Rectifier PaperDokument19 SeitenRectifier PaperMohamad SyazwanNoch keine Bewertungen
- Muhd Halalluddin Bin Abdul Rahim 1Dokument40 SeitenMuhd Halalluddin Bin Abdul Rahim 1Mohamad SyazwanNoch keine Bewertungen
- c2Dokument29 Seitenc2Mohamad SyazwanNoch keine Bewertungen
- Experiment 5 Lab Report Uitm Malaysian CollegeDokument16 SeitenExperiment 5 Lab Report Uitm Malaysian CollegeFaris Muhammad0% (1)
- EE 410 Lab1 Fall10-1305411901Dokument27 SeitenEE 410 Lab1 Fall10-1305411901Mohamad SyazwanNoch keine Bewertungen
- RectifiersDokument28 SeitenRectifiersMohamad SyazwanNoch keine Bewertungen
- Pejovic Kolar Final 1Dokument8 SeitenPejovic Kolar Final 1Mohamad Syazwan100% (1)
- Lecture 7Dokument33 SeitenLecture 7Mohamad SyazwanNoch keine Bewertungen
- Tutorial 5Dokument2 SeitenTutorial 5Mohamad SyazwanNoch keine Bewertungen
- CHOPPER CIRCUIT ANALYSISDokument1 SeiteCHOPPER CIRCUIT ANALYSISMohamad SyazwanNoch keine Bewertungen
- L12 Single Phase Uncontrolled RectifierDokument22 SeitenL12 Single Phase Uncontrolled Rectifierapi-19951707100% (1)
- CH4Dokument55 SeitenCH4Mohamad SyazwanNoch keine Bewertungen
- Controller Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Dokument27 SeitenController Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Mohamad SyazwanNoch keine Bewertungen
- Tutorial 2Dokument1 SeiteTutorial 2Mohamad SyazwanNoch keine Bewertungen
- Guide 1Dokument2 SeitenGuide 1Saithila ThilaNoch keine Bewertungen
- Tutorial 3Dokument2 SeitenTutorial 3Mohamad SyazwanNoch keine Bewertungen
- Tutorial 1Dokument2 SeitenTutorial 1Mohamad SyazwanNoch keine Bewertungen
- Common Forms of BusinessDokument22 SeitenCommon Forms of BusinessPanda DutchNoch keine Bewertungen
- Entrepreneurship Studies Chapter 1 1232804769353991 2Dokument26 SeitenEntrepreneurship Studies Chapter 1 1232804769353991 2fast nuNoch keine Bewertungen
- Fresh GraduateDokument2 SeitenFresh GraduateArin MuhammadNoch keine Bewertungen
- Chapter Four: 4.1 Project GoalDokument5 SeitenChapter Four: 4.1 Project GoalMohamad SyazwanNoch keine Bewertungen
- EntrepreneurshipDokument83 SeitenEntrepreneurshipRakeshh Bansi TalrejaNoch keine Bewertungen
- MachineDokument23 SeitenMachineMohamad SyazwanNoch keine Bewertungen
- Build an NXT Smart HouseDokument3 SeitenBuild an NXT Smart HouseMohamad SyazwanNoch keine Bewertungen
- Assignment2 Solution 3rd EditionDokument4 SeitenAssignment2 Solution 3rd EditionMohamad SyazwanNoch keine Bewertungen
- DEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringDokument3 SeitenDEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringMohamad SyazwanNoch keine Bewertungen
- Zener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Dokument5 SeitenZener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Mohamad SyazwanNoch keine Bewertungen
- 01 Full WorkbookDokument67 Seiten01 Full WorkbookalezozovNoch keine Bewertungen
- Grade 5 Nstech Term 1 Practical 2019Dokument6 SeitenGrade 5 Nstech Term 1 Practical 2019teeNoch keine Bewertungen
- Look at The Picture and Complete The PhrasesDokument5 SeitenLook at The Picture and Complete The PhrasesFaisal33% (3)
- Conditonal Rendering UIDokument5 SeitenConditonal Rendering UIAnonymous 52QjEhWNoch keine Bewertungen
- Buchner LectureDokument18 SeitenBuchner LectureAmr GamalNoch keine Bewertungen
- Ano Ang Structural Mitigation at Non Structural Mitigatio1Dokument4 SeitenAno Ang Structural Mitigation at Non Structural Mitigatio1sean ollerNoch keine Bewertungen
- Lesson Plan Science IVDokument4 SeitenLesson Plan Science IVraffy lavinaNoch keine Bewertungen
- Impact of Taxation On The Economic Growth of TanzaniaDokument10 SeitenImpact of Taxation On The Economic Growth of TanzaniaJohnBenardNoch keine Bewertungen
- 4 Hibiscus 8.40-9.40: Students Are Introduced To SongsDokument5 Seiten4 Hibiscus 8.40-9.40: Students Are Introduced To SongsFARHANI BINTI NORMAN MoeNoch keine Bewertungen
- ENGG 400 Engineering Ethics DilemmasDokument34 SeitenENGG 400 Engineering Ethics DilemmasShashwat ChakrabortiNoch keine Bewertungen
- FPM Issue 040Dokument130 SeitenFPM Issue 040Gábor Lipcsei50% (2)
- 4667 Mick̪�㺷鶉Abilities (Book PDFDokument19 Seiten4667 Mick̪�㺷鶉Abilities (Book PDFsusee98100% (2)
- Math 202 - Homework #6, 14.7 Solutions: N N N NDokument3 SeitenMath 202 - Homework #6, 14.7 Solutions: N N N NMorvaridYiNoch keine Bewertungen
- Dstl Tests New Multi-Terrain Camouflage Improving Soldier ConcealmentDokument5 SeitenDstl Tests New Multi-Terrain Camouflage Improving Soldier ConcealmentAdrian BottomleyNoch keine Bewertungen
- FFFFDokument3 SeitenFFFFMotlatso MaakeNoch keine Bewertungen
- Human Relations & YouDokument27 SeitenHuman Relations & YouDhea Rizky Amelia SatoNoch keine Bewertungen
- Buddhist Foundation of EconomicsDokument21 SeitenBuddhist Foundation of Economicsbyangchubsems100% (1)
- Rubric For Your IB MYP Unit Planner: For All Next Chapter UnitsDokument4 SeitenRubric For Your IB MYP Unit Planner: For All Next Chapter UnitsAlaa Dine SkouriNoch keine Bewertungen
- Erdas Imagine 2018: Product Features and ComparisonsDokument53 SeitenErdas Imagine 2018: Product Features and ComparisonsSaad AliNoch keine Bewertungen
- Quick Response Quality Control QRQCDokument17 SeitenQuick Response Quality Control QRQCKristof MC100% (1)
- Doxiadis Theory of Eskistics: Ekistics Is Descriptive Study of All Kinds of HumanDokument7 SeitenDoxiadis Theory of Eskistics: Ekistics Is Descriptive Study of All Kinds of HumanPrathmesh JoshiNoch keine Bewertungen
- Harvard Bim-Intro 1996Dokument2 SeitenHarvard Bim-Intro 1996Rui GavinaNoch keine Bewertungen
- Martha Crampton Guided Imagery PDFDokument75 SeitenMartha Crampton Guided Imagery PDFamimaimiuta100% (3)
- Astm F2971-13 (2021)Dokument4 SeitenAstm F2971-13 (2021)SiavashNoch keine Bewertungen
- Tyco Telecommunications, IncDokument16 SeitenTyco Telecommunications, IncStimulatingBroadband.comNoch keine Bewertungen
- Chapter 7Dokument48 SeitenChapter 7Aufa ZainiNoch keine Bewertungen
- ICap Manual - Oct 2012Dokument20 SeitenICap Manual - Oct 2012ecocadecNoch keine Bewertungen
- Safety Audit MonitoringDokument52 SeitenSafety Audit MonitoringThariq SalimNoch keine Bewertungen
- Theories of Outdoor & Adventure EducationDokument8 SeitenTheories of Outdoor & Adventure EducationMohd Zaidi Abd LatifNoch keine Bewertungen
- Consumer Satisfaction Level of Bajaj Bike Project ReportDokument72 SeitenConsumer Satisfaction Level of Bajaj Bike Project ReportBabasab Patil (Karrisatte)100% (9)