Das könnte Ihnen auch gefallen
- V-ISA System Starting Power AnalysisDokument7 SeitenV-ISA System Starting Power Analysispixelo09Noch keine Bewertungen
- PMSM - Dobro2Dokument29 SeitenPMSM - Dobro2Marko_DelNoch keine Bewertungen
- Bidirectional DC-DCDokument9 SeitenBidirectional DC-DCpixelo09Noch keine Bewertungen
- A New Control Technique FDokument8 SeitenA New Control Technique Fpixelo09Noch keine Bewertungen
- Outer RotorDokument4 SeitenOuter Rotorpixelo09Noch keine Bewertungen
- Analysis of A Large Power PMSM Using Different Control MethodsDokument6 SeitenAnalysis of A Large Power PMSM Using Different Control Methodspixelo09Noch keine Bewertungen
- PMSM Electric VehicleDokument95 SeitenPMSM Electric VehicleHuynh Thanh AnhNoch keine Bewertungen
- High-Speed PMSMDokument16 SeitenHigh-Speed PMSMpixelo09Noch keine Bewertungen
- Flywheel Smoothens Non-Uniform TorqueDokument14 SeitenFlywheel Smoothens Non-Uniform Torquepixelo09Noch keine Bewertungen
- Flywheel Smoothens Non-Uniform TorqueDokument14 SeitenFlywheel Smoothens Non-Uniform Torquepixelo09Noch keine Bewertungen
- PMSM Modelling Using MATLABDokument87 SeitenPMSM Modelling Using MATLABMd QutubuddinNoch keine Bewertungen
- The Motor GuideDokument135 SeitenThe Motor Guidegraduadoesime100% (2)
- DC To DC ConversionDokument8 SeitenDC To DC ConversionMichael-Denis NeculaNoch keine Bewertungen
- PWM RectifiersDokument4 SeitenPWM Rectifierspixelo09Noch keine Bewertungen
- LQG-LQR Controller DesignDokument37 SeitenLQG-LQR Controller Designapi-3698538100% (2)
- SPEED PresentationDokument22 SeitenSPEED Presentationpixelo09100% (1)
- Analysis of Surface Permanent Magnet Machines With Fractional-Slot Concentrated WindingsDokument10 SeitenAnalysis of Surface Permanent Magnet Machines With Fractional-Slot Concentrated Windingspixelo09Noch keine Bewertungen
- Input AC Voltage Sensorless Control Scheme For A Three-Phase PWM Rectifier in Wind Power Generation SystemDokument5 SeitenInput AC Voltage Sensorless Control Scheme For A Three-Phase PWM Rectifier in Wind Power Generation Systempixelo09Noch keine Bewertungen
- PIDtutorialDokument13 SeitenPIDtutorialalijnubyNoch keine Bewertungen
- PWM RectifiersDokument4 SeitenPWM Rectifierspixelo09Noch keine Bewertungen
- PI and PID Controller Tuning Rules - An OverviewDokument7 SeitenPI and PID Controller Tuning Rules - An OverviewRobert VillavicencioNoch keine Bewertungen
- Fractional-Slot Surface Mounted PM Motors With Concentrated Windings For Hev Traction DrivesDokument43 SeitenFractional-Slot Surface Mounted PM Motors With Concentrated Windings For Hev Traction Drivespixelo09Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Mechatronics MCQ: Dhirajlal Gandhi College of Technology, Salem Department of Mechanical EngineeringDokument16 SeitenMechatronics MCQ: Dhirajlal Gandhi College of Technology, Salem Department of Mechanical EngineeringUbedullah SaeedNoch keine Bewertungen
- Electrical System 994F Wheel Loader: Connector Location - Volume 1Dokument4 SeitenElectrical System 994F Wheel Loader: Connector Location - Volume 1Israel MirandaNoch keine Bewertungen
- V and Inverted V Curves of Synchronous Motor TheoryDokument4 SeitenV and Inverted V Curves of Synchronous Motor TheoryPrakash ArumugamNoch keine Bewertungen
- Power Transformers: Principles and ApplicationsDokument14 SeitenPower Transformers: Principles and Applicationsvikalp321Noch keine Bewertungen
- Work Instructions: Air Filter Replacement Capstone Model C200 Microturbine /C1000 Series Purpose and ScopeDokument11 SeitenWork Instructions: Air Filter Replacement Capstone Model C200 Microturbine /C1000 Series Purpose and ScopeJefferson MosqueraNoch keine Bewertungen
- Class X Chapter 09 - Electrical Power and Household Circuits PhysicsDokument31 SeitenClass X Chapter 09 - Electrical Power and Household Circuits PhysicsVenu GopalNoch keine Bewertungen
- LCD Test Tool InstructionsDokument8 SeitenLCD Test Tool Instructionsjo snadaNoch keine Bewertungen
- EX215028 Busbar CatalogueDokument164 SeitenEX215028 Busbar Cataloguewarmaster81Noch keine Bewertungen
- RT300MDokument17 SeitenRT300MIonel SimaNoch keine Bewertungen
- Electrical Design AnalysisDokument2 SeitenElectrical Design AnalysisMaritel SumatraNoch keine Bewertungen
- Freja RTS21DDokument8 SeitenFreja RTS21DrohitduraiNoch keine Bewertungen
- Transmission Line TranspositionsDokument4 SeitenTransmission Line TranspositionsLRHENGNoch keine Bewertungen
- MI 365 Rev A - Electric TachometersDokument4 SeitenMI 365 Rev A - Electric TachometersJesse BarnettNoch keine Bewertungen
- Normas Americanas KKK PDFDokument69 SeitenNormas Americanas KKK PDFcristhiamcrNoch keine Bewertungen
- Importance of Electricity in the Modern AgeDokument2 SeitenImportance of Electricity in the Modern AgeMT RANoch keine Bewertungen
- Iec 62271 1 Edition 2017Dokument28 SeitenIec 62271 1 Edition 2017Prabhu Govindaswamy50% (2)
- Ecofit Type DS Square D, WestinghouseDokument2 SeitenEcofit Type DS Square D, WestinghousehaiqalNoch keine Bewertungen
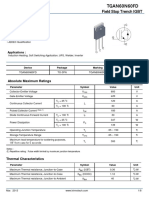
- Field Stop Trench IGBT: Absolute Maximum RatingsDokument8 SeitenField Stop Trench IGBT: Absolute Maximum RatingsHeru susantoNoch keine Bewertungen
- Magnetic Energy GeneratorDokument5 SeitenMagnetic Energy Generatorsaltamontes69100% (1)
- 2.4 Wheatstone 91-10Dokument8 Seiten2.4 Wheatstone 91-10Murray PhysicsNoch keine Bewertungen
- Mag Apps+Instal v1.5Dokument19 SeitenMag Apps+Instal v1.5electron13Noch keine Bewertungen
- Ap4n2r1mt V1Dokument6 SeitenAp4n2r1mt V1Mar GaoNoch keine Bewertungen
- NikolsddDokument1 SeiteNikolsddMaissyNoch keine Bewertungen
- Iesco 2019Dokument6 SeitenIesco 2019بد تميزNoch keine Bewertungen
- Controladores de Motores de CDDokument19 SeitenControladores de Motores de CDOrlandox LgNoch keine Bewertungen
- Low-Cost 270 MHZ Differential Receiver Amplifiers: S at G 1 S at G 10Dokument28 SeitenLow-Cost 270 MHZ Differential Receiver Amplifiers: S at G 1 S at G 10flo72afNoch keine Bewertungen
- TB04300003E Tab29Dokument80 SeitenTB04300003E Tab29raitoNoch keine Bewertungen
- Suspension Performance with One Damper and One InerterDokument6 SeitenSuspension Performance with One Damper and One Inerterนิติพล ไชยวงศ์Noch keine Bewertungen
- AC2100 AC2500 Installation GuideDokument16 SeitenAC2100 AC2500 Installation GuideEduardo MartínezNoch keine Bewertungen
- MP40 Service Manual PDFDokument92 SeitenMP40 Service Manual PDFShovan AdhikaryNoch keine Bewertungen