Das könnte Ihnen auch gefallen
- Best Practices Data SheetsDokument8 SeitenBest Practices Data SheetssgiraldoaNoch keine Bewertungen
- A Survey of Anti-Tamper TechnologiesDokument5 SeitenA Survey of Anti-Tamper TechnologiesAlancito MartinezNoch keine Bewertungen
- Anti-Tamper Memory (WP) 1Dokument5 SeitenAnti-Tamper Memory (WP) 1aaantennaNoch keine Bewertungen
- Low-Cost Anti-Tamper Technology: MITRE Sponsored ResearchDokument9 SeitenLow-Cost Anti-Tamper Technology: MITRE Sponsored ResearchAlancito MartinezNoch keine Bewertungen
- A Survey of Anti-Tamper TechnologiesDokument5 SeitenA Survey of Anti-Tamper TechnologiesAlancito MartinezNoch keine Bewertungen
- BHUSA09 Kortchinsky Cloudburst SLIDESDokument48 SeitenBHUSA09 Kortchinsky Cloudburst SLIDESAlancito MartinezNoch keine Bewertungen
- Anti-Tamper Memory (WP) 1Dokument5 SeitenAnti-Tamper Memory (WP) 1aaantennaNoch keine Bewertungen
- Martignoni - Cloud Terminal - Secure Access To Sensitive Applications From Untrusted SystemsDokument12 SeitenMartignoni - Cloud Terminal - Secure Access To Sensitive Applications From Untrusted SystemsAlancito MartinezNoch keine Bewertungen
- Andrews - Trusted Computing in Embedded SystemsDokument10 SeitenAndrews - Trusted Computing in Embedded SystemsalncoramdeoNoch keine Bewertungen
- Cybenko - Quantitative Evaluation of Risk For Investment Efficient Strategies in Cybersecurity - The QuERIES MethodologyDokument18 SeitenCybenko - Quantitative Evaluation of Risk For Investment Efficient Strategies in Cybersecurity - The QuERIES MethodologyAlancito MartinezNoch keine Bewertungen
- Huffmire - Managing Security in FPGA-Based Embedded SystemsDokument11 SeitenHuffmire - Managing Security in FPGA-Based Embedded SystemsAlancito MartinezNoch keine Bewertungen
- Hamlen - Security Issues Fo Cloud ComputingDokument14 SeitenHamlen - Security Issues Fo Cloud ComputingAlancito MartinezNoch keine Bewertungen
- Simha - Secure Execution With Components From Untrusted FoundriesDokument6 SeitenSimha - Secure Execution With Components From Untrusted FoundriesAlancito MartinezNoch keine Bewertungen
- Haldar - Towards Trusted Systems From The Ground UpDokument4 SeitenHaldar - Towards Trusted Systems From The Ground UpAlancito MartinezNoch keine Bewertungen
- Hofmann - Secure Applications On An Untrusted Operating SystemDokument2 SeitenHofmann - Secure Applications On An Untrusted Operating SystemAlancito MartinezNoch keine Bewertungen
- Blasch-Net-Centric Layered Sensing (ISIF08panel)Dokument3 SeitenBlasch-Net-Centric Layered Sensing (ISIF08panel)Alancito MartinezNoch keine Bewertungen
- Georgiev - A Security Model For Distributed ComputingDokument7 SeitenGeorgiev - A Security Model For Distributed ComputingAlancito MartinezNoch keine Bewertungen
- Ashleigh-Trust and TechnologiesDokument10 SeitenAshleigh-Trust and TechnologiesAlancito MartinezNoch keine Bewertungen
- Hamlen - Security Issues Fo Cloud ComputingDokument14 SeitenHamlen - Security Issues Fo Cloud ComputingAlancito MartinezNoch keine Bewertungen
- Bryant-Layered Sensing, Definition, Attributes, Guiding Principles (AFD-080820-005)Dokument40 SeitenBryant-Layered Sensing, Definition, Attributes, Guiding Principles (AFD-080820-005)Alancito MartinezNoch keine Bewertungen
- Bellissimo - Secure Software Updates - Disappointments and New ChallengesDokument7 SeitenBellissimo - Secure Software Updates - Disappointments and New ChallengesAlancito MartinezNoch keine Bewertungen
- Blasch-Net-Centric Layered Sensing (ISIF08panel)Dokument3 SeitenBlasch-Net-Centric Layered Sensing (ISIF08panel)Alancito MartinezNoch keine Bewertungen
- Bryant-Layered Sensing, Definition, Attributes, Guiding Principles (AFD-080820-005)Dokument40 SeitenBryant-Layered Sensing, Definition, Attributes, Guiding Principles (AFD-080820-005)Alancito MartinezNoch keine Bewertungen
- Geron - Cryptographic Remote Untrusted Storage Without Public KeysDokument32 SeitenGeron - Cryptographic Remote Untrusted Storage Without Public KeysAlancito MartinezNoch keine Bewertungen
- Cybenko - Quantitative Evaluation of Risk For Investment Efficient Strategies in Cybersecurity - The QuERIES MethodologyDokument18 SeitenCybenko - Quantitative Evaluation of Risk For Investment Efficient Strategies in Cybersecurity - The QuERIES MethodologyAlancito MartinezNoch keine Bewertungen
- Bryant-Layered Sensing, Definition, Attributes, Guiding Principles (AFD-080820-005)Dokument40 SeitenBryant-Layered Sensing, Definition, Attributes, Guiding Principles (AFD-080820-005)Alancito MartinezNoch keine Bewertungen
- Hofmann - Secure Applications On An Untrusted Operating SystemDokument2 SeitenHofmann - Secure Applications On An Untrusted Operating SystemAlancito MartinezNoch keine Bewertungen
- Haldar - Towards Trusted Systems From The Ground UpDokument4 SeitenHaldar - Towards Trusted Systems From The Ground UpAlancito MartinezNoch keine Bewertungen
- Goh - SiRiUS - Securing Remote Untrusted StorageDokument15 SeitenGoh - SiRiUS - Securing Remote Untrusted StorageAlancito MartinezNoch keine Bewertungen
- Cook - Remotely Keyed Cryptographics Secure Remote Display Access Using (Mostly) Untrusted HardwareDokument13 SeitenCook - Remotely Keyed Cryptographics Secure Remote Display Access Using (Mostly) Untrusted HardwareAlancito MartinezNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Far Eastern University Mba - Thesis 060517Dokument2 SeitenFar Eastern University Mba - Thesis 060517Lex AcadsNoch keine Bewertungen
- Al Rafay ProfileDokument8 SeitenAl Rafay ProfileRana UsmanNoch keine Bewertungen
- Unit 6 Selected and Short AnswersDokument19 SeitenUnit 6 Selected and Short Answersbebepic355Noch keine Bewertungen
- Lecture 4 EMADokument36 SeitenLecture 4 EMAYai IbrahimNoch keine Bewertungen
- Angelic Spirit Work in The Hoodoo TraditionDokument6 SeitenAngelic Spirit Work in The Hoodoo TraditionDaniel Sampaio100% (1)
- Lesson Plan - Organization and ManagementDokument5 SeitenLesson Plan - Organization and ManagementBilly Joe80% (15)
- Thetford c250 InstallationDokument19 SeitenThetford c250 InstallationCatalin Bejan100% (1)
- NewspaperDokument2 SeitenNewspaperbro nabsNoch keine Bewertungen
- Report Text The Duck Billed Platypus: (Ornithorhynchus Anatinus)Dokument2 SeitenReport Text The Duck Billed Platypus: (Ornithorhynchus Anatinus)Lilis IndriyaniNoch keine Bewertungen
- Gynaecology Thesis TopicsDokument7 SeitenGynaecology Thesis TopicsDawn Cook100% (2)
- Examiners' Report Principal Examiner Feedback January 2018Dokument9 SeitenExaminers' Report Principal Examiner Feedback January 2018RafaNoch keine Bewertungen
- Working With Hierarchies External V08Dokument9 SeitenWorking With Hierarchies External V08Devesh ChangoiwalaNoch keine Bewertungen
- Tle10 Cookery DLL Q1-Week1 Sy2022-2023Dokument4 SeitenTle10 Cookery DLL Q1-Week1 Sy2022-2023Edmar S AguilarNoch keine Bewertungen
- Impact of Technology On Our LivesDokument3 SeitenImpact of Technology On Our LivesKim ErandioNoch keine Bewertungen
- Dania - 22 - 12363 - 1-Lecture 2 Coordinate System-Fall 2015Dokument34 SeitenDania - 22 - 12363 - 1-Lecture 2 Coordinate System-Fall 2015erwin100% (1)
- Perfume 130Dokument3 SeitenPerfume 130Gurdeep BhattalNoch keine Bewertungen
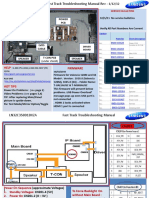
- Samsung LN55C610N1FXZA Fast Track Guide (SM)Dokument4 SeitenSamsung LN55C610N1FXZA Fast Track Guide (SM)Carlos OdilonNoch keine Bewertungen
- Accomplishment Report Filipino Values MonthDokument4 SeitenAccomplishment Report Filipino Values MonthIan Santos B. Salinas100% (10)
- D904 - D906 - D914 - D916 - D924 - D926 - 8718458 - 04092008 - v02 - enDokument218 SeitenD904 - D906 - D914 - D916 - D924 - D926 - 8718458 - 04092008 - v02 - enАлексей89% (18)
- Unit 8 Atomic Fluorescence Spectrometry PDFDokument23 SeitenUnit 8 Atomic Fluorescence Spectrometry PDFCh AswadNoch keine Bewertungen
- Unpriced Proposed Renovation of Bugolobi Flat, Block C For Uganda Coffee Development AuthorityDokument39 SeitenUnpriced Proposed Renovation of Bugolobi Flat, Block C For Uganda Coffee Development AuthoritynicolasNoch keine Bewertungen
- Position Trading Maximizing Probability of Winning TradesDokument91 SeitenPosition Trading Maximizing Probability of Winning Tradescarlo bakaakoNoch keine Bewertungen
- Durham E-ThesesDokument203 SeitenDurham E-ThesesH Man SharifNoch keine Bewertungen
- Under The SHODH Program For ResearchDokument3 SeitenUnder The SHODH Program For ResearchSurya ShuklaNoch keine Bewertungen
- ESUR Guidelines 10.0 Final VersionDokument46 SeitenESUR Guidelines 10.0 Final Versionkon shireNoch keine Bewertungen
- What Is StevedoringDokument10 SeitenWhat Is StevedoringMinhaj KmNoch keine Bewertungen
- Concept MapDokument1 SeiteConcept Mapapi-402935758Noch keine Bewertungen
- UntitledDokument45 SeitenUntitledjemNoch keine Bewertungen
- Cel2106 SCL Worksheet 6Dokument3 SeitenCel2106 SCL Worksheet 6HarryJoy JackNoch keine Bewertungen
- Final Project Part-3 Marketing PlanDokument8 SeitenFinal Project Part-3 Marketing PlanIam TwinStormsNoch keine Bewertungen