Das könnte Ihnen auch gefallen
- M.Kumarasamy College of Engineering Thalavapalayam, Karur (Autonomous) Bio-Data M.Kumarasamy College of Thalavapalayam, Karur - 639113Dokument2 SeitenM.Kumarasamy College of Engineering Thalavapalayam, Karur (Autonomous) Bio-Data M.Kumarasamy College of Thalavapalayam, Karur - 639113RokiniKumarasamyNoch keine Bewertungen
- Two Days National Workshop ONDokument2 SeitenTwo Days National Workshop ONHarish S KiranNoch keine Bewertungen
- By Icica Paper: File Time Submitted Submission Id Word Count Character CountDokument9 SeitenBy Icica Paper: File Time Submitted Submission Id Word Count Character CountHarish S KiranNoch keine Bewertungen
- Defining Impact of Distributed Generation On Power System StabilityDokument4 SeitenDefining Impact of Distributed Generation On Power System StabilityHarish S KiranNoch keine Bewertungen
- A Decoupled Control Strategy of PMSG For Variable Speed Wind Power ApplicationDokument6 SeitenA Decoupled Control Strategy of PMSG For Variable Speed Wind Power ApplicationHarish S KiranNoch keine Bewertungen
- JNIT1 569 316 Invoice - ReceiptDokument1 SeiteJNIT1 569 316 Invoice - ReceiptHarish S KiranNoch keine Bewertungen
- 373 - Offer For C.M.V. Marriage Hall - 45kVA - RKDokument6 Seiten373 - Offer For C.M.V. Marriage Hall - 45kVA - RKHarish S KiranNoch keine Bewertungen
- Multi-Machine Power System Stabilizer Adjustment Using Genetic AlgorithmsDokument5 SeitenMulti-Machine Power System Stabilizer Adjustment Using Genetic AlgorithmsHarish S KiranNoch keine Bewertungen
- Rental AgreementDokument3 SeitenRental AgreementHarish S KiranNoch keine Bewertungen
- Timetableeven-2014 (05-01-15) Jan 5 2014Dokument109 SeitenTimetableeven-2014 (05-01-15) Jan 5 2014Harish S KiranNoch keine Bewertungen
- Evaluation of Stability Index by Swarm Optimization TechniquesDokument6 SeitenEvaluation of Stability Index by Swarm Optimization TechniquesHarish S KiranNoch keine Bewertungen
- KavasamDokument2 SeitenKavasamHarish S KiranNoch keine Bewertungen
- ThousandnamesDokument8 SeitenThousandnamesHarish S KiranNoch keine Bewertungen
- 06 OpfDokument50 Seiten06 OpfRudra Kumar MishraNoch keine Bewertungen
- Design of Electrical Machines NotesDokument24 SeitenDesign of Electrical Machines Notesmadhes14Noch keine Bewertungen
- Ee1001 Basic Electrical Engineering 2014Dokument5 SeitenEe1001 Basic Electrical Engineering 2014Harish S KiranNoch keine Bewertungen
- 18Dokument4 Seiten18Harish S KiranNoch keine Bewertungen
- C Library FunctionsDokument62 SeitenC Library FunctionsHarish S KiranNoch keine Bewertungen
- Key For Cycle Test-2 Part-A 1. Blv Sin Θ 2. Co-Efficient Of Coupling 3. 90,000 At/Web 4. Halved 5. 6. 1.11 7. 8. Var, Kvar 9Dokument3 SeitenKey For Cycle Test-2 Part-A 1. Blv Sin Θ 2. Co-Efficient Of Coupling 3. 90,000 At/Web 4. Halved 5. 6. 1.11 7. 8. Var, Kvar 9Harish S KiranNoch keine Bewertungen
- 001Dokument4 Seiten001Harish S KiranNoch keine Bewertungen
- ECE E Marks 281-315Dokument1 SeiteECE E Marks 281-315Harish S KiranNoch keine Bewertungen
- W09 0006Dokument6 SeitenW09 0006Harish S KiranNoch keine Bewertungen
- Sarva Mangala Maangalye Shive Sarvaartha SaadhikeDokument1 SeiteSarva Mangala Maangalye Shive Sarvaartha SaadhikeMohana Ram MurugiahNoch keine Bewertungen
- Mudra'sDokument5 SeitenMudra'sHarish S Kiran100% (3)
- Eee Curriculam 2009onwardsDokument291 SeitenEee Curriculam 2009onwardsHarish S KiranNoch keine Bewertungen
- Lec 05Dokument8 SeitenLec 05Harish S KiranNoch keine Bewertungen
- CopyrightlncsDokument1 SeiteCopyrightlncslaxmankurnoolNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Manufacuring EngineeringDokument3 SeitenManufacuring Engineeringapi-79207659Noch keine Bewertungen
- Apcotide 1000 pc2782Dokument1 SeiteApcotide 1000 pc2782hellmanyaNoch keine Bewertungen
- Igcse Revision BookDokument23 SeitenIgcse Revision BookJo Patrick100% (2)
- Salem RPGDokument16 SeitenSalem RPGabstockingNoch keine Bewertungen
- Nicholas Hudson - From Nation To Race: The Origin of Racial Classification in Eighteenth-CenturyDokument19 SeitenNicholas Hudson - From Nation To Race: The Origin of Racial Classification in Eighteenth-CenturyPedro IINoch keine Bewertungen
- Chennai To Vishakhapatnam El6Vvd: Indigo 6E-6835Dokument3 SeitenChennai To Vishakhapatnam El6Vvd: Indigo 6E-6835VENKATESH POONDRUNoch keine Bewertungen
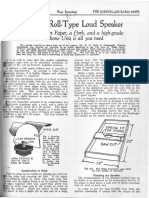
- Simple Roll-Type: A Loud SpeakerDokument1 SeiteSimple Roll-Type: A Loud SpeakerEudes SilvaNoch keine Bewertungen
- Eating With Chloe Lets EatDokument150 SeitenEating With Chloe Lets Eatemily.jarrodNoch keine Bewertungen
- Table 1 Minimum Separation DistancesDokument123 SeitenTable 1 Minimum Separation DistancesjhonNoch keine Bewertungen
- History and Philo of ScienceDokument5 SeitenHistory and Philo of ScienceJan Oliver YaresNoch keine Bewertungen
- E-OLSS: Electronic ControlDokument12 SeitenE-OLSS: Electronic ControlSamidiNoch keine Bewertungen
- Present Simple TaskDokument3 SeitenPresent Simple TaskMaria AlejandraNoch keine Bewertungen
- Final TestDokument10 SeitenFinal TestbennyNoch keine Bewertungen
- John Sisler CISSP Study GuideDokument126 SeitenJohn Sisler CISSP Study GuideAnthonyNoch keine Bewertungen
- Convection Concentric Annulus Vertical Cylinders Filling Porous MediaDokument17 SeitenConvection Concentric Annulus Vertical Cylinders Filling Porous MediakarthikeyanNoch keine Bewertungen
- Generalized Anxiety DisorderDokument24 SeitenGeneralized Anxiety DisorderEula Angelica OcoNoch keine Bewertungen
- Manual Nice9000v A04Dokument151 SeitenManual Nice9000v A04hoang tamNoch keine Bewertungen
- Salapare Et Al 2015 ZambalesDokument12 SeitenSalapare Et Al 2015 ZambalesTiqfar AhmadjayadiNoch keine Bewertungen
- Sch3u Exam Review Ws s2018 PDFDokument4 SeitenSch3u Exam Review Ws s2018 PDFwdsfNoch keine Bewertungen
- 09 Passport 7K 15K Performance Guidelines PCR 3 0Dokument44 Seiten09 Passport 7K 15K Performance Guidelines PCR 3 0thed719Noch keine Bewertungen
- DCS YokogawaDokument17 SeitenDCS Yokogawasswahyudi100% (1)
- The Ieee Test System Methods: Reliability ofDokument11 SeitenThe Ieee Test System Methods: Reliability ofFsdaSdsNoch keine Bewertungen
- Tsel Manual ThermoselDokument25 SeitenTsel Manual ThermoselPedro AlvelaisNoch keine Bewertungen
- Exercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresDokument14 SeitenExercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresHasmaye PintoNoch keine Bewertungen
- Intro Slow Keyofg: Em7 G5 A7Sus4 G C/G D/F# AmDokument2 SeitenIntro Slow Keyofg: Em7 G5 A7Sus4 G C/G D/F# Ammlefev100% (1)
- Donna Hay Magazine 2014-10-11 PDFDokument172 SeitenDonna Hay Magazine 2014-10-11 PDFlekovic_tanjaNoch keine Bewertungen
- Illuminati TruthsDokument27 SeitenIlluminati TruthsDonnaveo ShermanNoch keine Bewertungen
- Intumescent Paint For Steel NZ - Coating - Co.nzDokument8 SeitenIntumescent Paint For Steel NZ - Coating - Co.nzPeter ThomsonNoch keine Bewertungen
- Factors Affecting Physical FitnessDokument7 SeitenFactors Affecting Physical FitnessMary Joy Escanillas Gallardo100% (2)
- Aluminium Alloy - Wikipedia, The Free EncyclopediaDokument12 SeitenAluminium Alloy - Wikipedia, The Free EncyclopediaAshishJoshi100% (1)