Das könnte Ihnen auch gefallen
- A Review of Physics Simulators For Robotic ApplicationsDokument16 SeitenA Review of Physics Simulators For Robotic ApplicationsHarshil NaikNoch keine Bewertungen
- Robotic Design To Detect and Avoid CollisionsDokument11 SeitenRobotic Design To Detect and Avoid CollisionsInternational Journal of Innovative Science and Research Technology100% (1)
- Objective & Outcome of RoboticsDokument3 SeitenObjective & Outcome of RoboticsMechanicalNoch keine Bewertungen
- Swarm Robotics Design and ImplementationDokument9 SeitenSwarm Robotics Design and ImplementationMUHAMMAD AMMARNoch keine Bewertungen
- Review of Related Literature CathDokument10 SeitenReview of Related Literature CathCathlyn AbionNoch keine Bewertungen
- Robotics AssignmentDokument3 SeitenRobotics AssignmentSameer Pidadi100% (1)
- Editorial Special Issue Field Service RoboticsDokument2 SeitenEditorial Special Issue Field Service RoboticsVenkat ShastriNoch keine Bewertungen
- Path Planning of Mobile Agents Using Ai TechniqueDokument64 SeitenPath Planning of Mobile Agents Using Ai TechniqueGautam RaminiNoch keine Bewertungen
- Novel Mobile Robot Path Planning Algorithm: Hachour OuardaDokument10 SeitenNovel Mobile Robot Path Planning Algorithm: Hachour Ouarday.yusofNoch keine Bewertungen
- Research Proposal Final - Moradi-1Dokument4 SeitenResearch Proposal Final - Moradi-1api-611744595Noch keine Bewertungen
- Artificial Intelligence and RoboticsDokument13 SeitenArtificial Intelligence and RoboticsRamalaxmiNoch keine Bewertungen
- A Rtificial Intelligence and Robotics: Contributi ScientificiDokument7 SeitenA Rtificial Intelligence and Robotics: Contributi Scientificibiswa217Noch keine Bewertungen
- Mobile Robotics: Research, Applications and Challenges PDFDokument4 SeitenMobile Robotics: Research, Applications and Challenges PDFdrugoksNoch keine Bewertungen
- UPM-SPQR Rescue Virtual Robots Team Description PaperDokument8 SeitenUPM-SPQR Rescue Virtual Robots Team Description Paperkinghez74Noch keine Bewertungen
- Robotic Arm Given A Three Degree of FreedomDokument28 SeitenRobotic Arm Given A Three Degree of FreedomEmmanuel OmaleNoch keine Bewertungen
- 11-Mechatronics Robot Navigation Using Machine Learning and AIDokument4 Seiten11-Mechatronics Robot Navigation Using Machine Learning and AIsanjayshelarNoch keine Bewertungen
- Object Detection Techniques For Mobile Robot Navigation in Dynamic Indoor Environment: A ReviewDokument11 SeitenObject Detection Techniques For Mobile Robot Navigation in Dynamic Indoor Environment: A ReviewiajerNoch keine Bewertungen
- Reactive Navigation For Autonomous Guided Vehicle Using The Neuro-Fuzzy TechniquesDokument10 SeitenReactive Navigation For Autonomous Guided Vehicle Using The Neuro-Fuzzy TechniquesMiguel SilvaNoch keine Bewertungen
- Research Paper On Space RoboticsDokument4 SeitenResearch Paper On Space Roboticssmltlfrif100% (1)
- Intelligent Navigation of An Autonomous Outdoor Mobile Robot in A Dynamic EnvironmentDokument5 SeitenIntelligent Navigation of An Autonomous Outdoor Mobile Robot in A Dynamic EnvironmentSigfred Vincent LarotNoch keine Bewertungen
- Space Robotics Seminar Report 2018Dokument30 SeitenSpace Robotics Seminar Report 2018clash with ykNoch keine Bewertungen
- A Novel Design of A Quadruped Robot For Research PurposesDokument13 SeitenA Novel Design of A Quadruped Robot For Research Purposessushreet2754Noch keine Bewertungen
- Active Object Search Using A Pyramid Approach To Determine The Next-Best-ViewDokument19 SeitenActive Object Search Using A Pyramid Approach To Determine The Next-Best-ViewIAES International Journal of Robotics and AutomationNoch keine Bewertungen
- Robo Seguidor de ParedeDokument7 SeitenRobo Seguidor de ParedeUlisses BelzNoch keine Bewertungen
- Collaborative Quadricopter-Mobile Robots Ground Scan Using ARTAGS Visual Pose EstimationDokument6 SeitenCollaborative Quadricopter-Mobile Robots Ground Scan Using ARTAGS Visual Pose EstimationHarsha Vardhan BaleNoch keine Bewertungen
- Virtual Camera Perspectives Within A 3-D Interface For Robotic Search and RescueDokument5 SeitenVirtual Camera Perspectives Within A 3-D Interface For Robotic Search and RescueVishu KumarNoch keine Bewertungen
- Full TextDokument2 SeitenFull TextLaura Rua BassNoch keine Bewertungen
- Sols Papers MicrorobotDokument10 SeitenSols Papers MicrorobotRAPRATSINNoch keine Bewertungen
- Paper AIDokument31 SeitenPaper AIklaus peterNoch keine Bewertungen
- Vision Guided RoboticsDokument13 SeitenVision Guided RoboticsVijay ShivakumarNoch keine Bewertungen
- A Review of Probabilistic Map Based TechniquesDokument9 SeitenA Review of Probabilistic Map Based TechniquesNguyễn Trường GiangNoch keine Bewertungen
- An Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsDokument10 SeitenAn Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsAdam HansenNoch keine Bewertungen
- Literature Review Mobile RobotDokument8 SeitenLiterature Review Mobile Robotafmzzaadfjygyf100% (1)
- Design and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariDokument6 SeitenDesign and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariPutri metapowerNoch keine Bewertungen
- RoboticsDokument12 SeitenRoboticsAngel Mae D. AndolanNoch keine Bewertungen
- Sensors 20 05409Dokument19 SeitenSensors 20 05409mezianeNoch keine Bewertungen
- Implementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotDokument6 SeitenImplementation of Ros Navigation Stack On Lego Mindstorms NXT 2.0 RobotwendersoncsdepNoch keine Bewertungen
- Islam, M.J., J. Hong, and J. Sattar, Person-Following by Autonomous Robots PDFDokument38 SeitenIslam, M.J., J. Hong, and J. Sattar, Person-Following by Autonomous Robots PDFsalah eldeenNoch keine Bewertungen
- Moradi Arian Synthesis Paper-1Dokument21 SeitenMoradi Arian Synthesis Paper-1api-611744595100% (1)
- Spider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisDokument6 SeitenSpider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisLuis RuizNoch keine Bewertungen
- Development of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotDokument9 SeitenDevelopment of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotIAES International Journal of Robotics and AutomationNoch keine Bewertungen
- ROS Navigation Concepts and TutorialDokument28 SeitenROS Navigation Concepts and TutorialvipulNoch keine Bewertungen
- Enrico Pagello: Intelligent Autonomous System Laboratory (IAS-Lab) University of Padua, ItalyDokument13 SeitenEnrico Pagello: Intelligent Autonomous System Laboratory (IAS-Lab) University of Padua, Italyanon_864995Noch keine Bewertungen
- Management LogisticDokument12 SeitenManagement LogisticBogdan BungardiNoch keine Bewertungen
- Person Tracking and Following With 2D Laser Scanners: Angus Leigh, Joelle Pineau, Nicolas Olmedo, and Hong ZhangDokument8 SeitenPerson Tracking and Following With 2D Laser Scanners: Angus Leigh, Joelle Pineau, Nicolas Olmedo, and Hong ZhangSergio David Sierra MarinNoch keine Bewertungen
- Expt. No.: ExperimentDokument5 SeitenExpt. No.: ExperimentSwapnil DeyNoch keine Bewertungen
- An Overview of Autonomous Mobile Robot Path Planning AlgorithmsDokument7 SeitenAn Overview of Autonomous Mobile Robot Path Planning AlgorithmsWilberFabiánNoch keine Bewertungen
- Lec 1 UpdatedDokument60 SeitenLec 1 Updatedmuhammad usamaNoch keine Bewertungen
- Abbasov 2019 IOP Conf. Ser. Mater. Sci. Eng. 560 012001 PDFDokument9 SeitenAbbasov 2019 IOP Conf. Ser. Mater. Sci. Eng. 560 012001 PDFPoornima JoshiNoch keine Bewertungen
- Base PapDokument6 SeitenBase PapAnonymous ovq7UE2WzNoch keine Bewertungen
- Methodology For Path Planning and Optimization of Mobile Robots: A Review Methodology For Path Planning and Optimization of Mobile Robots: A ReviewDokument12 SeitenMethodology For Path Planning and Optimization of Mobile Robots: A Review Methodology For Path Planning and Optimization of Mobile Robots: A ReviewDilek METİNNoch keine Bewertungen
- Intro 2 BotsDokument4 SeitenIntro 2 BotsChahit ToorNoch keine Bewertungen
- 680 Ra05Dokument7 Seiten680 Ra05mudassar3071Noch keine Bewertungen
- Walking Algorithm For Robotis Op3 Humanoid Robot With Force SensorsDokument5 SeitenWalking Algorithm For Robotis Op3 Humanoid Robot With Force Sensorsfurqon maulanaNoch keine Bewertungen
- Robots at Space ExplorationDokument19 SeitenRobots at Space ExplorationmohammedNoch keine Bewertungen
- Chapter 11 Robotics in Manufacturing Processes p182-197Dokument21 SeitenChapter 11 Robotics in Manufacturing Processes p182-197api-152132438Noch keine Bewertungen
- Robot Operating System Based Autonomous Navigation Platform With Human Robot InteractionDokument9 SeitenRobot Operating System Based Autonomous Navigation Platform With Human Robot InteractionTELKOMNIKA100% (1)
- Integration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideDokument5 SeitenIntegration of Open Source Platform Duckietown and Gesture Recognition As An Interactive Interface For The Museum Robotic GuideandreNoch keine Bewertungen
- Study On Structural Modeling and Kinematics Analysis of A Novel Wheel-Legged Rescue RobotDokument17 SeitenStudy On Structural Modeling and Kinematics Analysis of A Novel Wheel-Legged Rescue RobotZehra ÇİFCİBAŞINoch keine Bewertungen
- Techniques of Helmet Removal From Injured Patients: April 1997Dokument2 SeitenTechniques of Helmet Removal From Injured Patients: April 1997Carlos RamirezNoch keine Bewertungen
- MDX650 Rotary TutorialDokument17 SeitenMDX650 Rotary TutorialCarlos RamirezNoch keine Bewertungen
- Actuator BrochureDokument6 SeitenActuator BrochureCarlos Ramirez100% (1)
- Acme Ball ScrewsDokument27 SeitenAcme Ball ScrewsCarlos Ramirez100% (1)
- Gasturbine Engines For Model AircraftDokument104 SeitenGasturbine Engines For Model AircraftSaransiri Wongsiri94% (16)
- Zeroing Xyz On MillDokument1 SeiteZeroing Xyz On MillCarlos RamirezNoch keine Bewertungen
- 17 ActuatorDokument1 Seite17 ActuatorCarlos RamirezNoch keine Bewertungen
- 2008 CatalogDokument99 Seiten2008 CatalogCarlos RamirezNoch keine Bewertungen
- 2006 Taper BitDokument1 Seite2006 Taper BitCarlos RamirezNoch keine Bewertungen
- MDX650 Rotary TutorialDokument17 SeitenMDX650 Rotary TutorialCarlos RamirezNoch keine Bewertungen
- KH56KDokument2 SeitenKH56KCarlos RamirezNoch keine Bewertungen
- Process Control Servo System SD 1664 Stepper Motor Training UnitDokument1 SeiteProcess Control Servo System SD 1664 Stepper Motor Training UnitCarlos RamirezNoch keine Bewertungen
- Waterjet CutterDokument4 SeitenWaterjet CutterCarlos RamirezNoch keine Bewertungen
- Torno t400 BrochureDokument4 SeitenTorno t400 BrochureCarlos RamirezNoch keine Bewertungen
- Process Control Servo SystemDokument16 SeitenProcess Control Servo SystemCarlos RamirezNoch keine Bewertungen
- The Art of Motion Control - SubcategoryDokument2 SeitenThe Art of Motion Control - SubcategoryCarlos RamirezNoch keine Bewertungen
- Torchmate Catalog 11-8-04Dokument29 SeitenTorchmate Catalog 11-8-04Carlos RamirezNoch keine Bewertungen
- mf70 PKGDokument19 Seitenmf70 PKGCarlos RamirezNoch keine Bewertungen
- Machine Data Sheet: Model G0519 Mill/Drill/Tapping MachineDokument2 SeitenMachine Data Sheet: Model G0519 Mill/Drill/Tapping MachineCarlos RamirezNoch keine Bewertungen
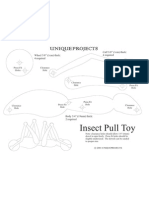
- Insect Pull Toy: Wheel 3/8" (1cm) Thick: 4 Required Calf 3/8" (1cm) Thick: 4 RequiredDokument1 SeiteInsect Pull Toy: Wheel 3/8" (1cm) Thick: 4 Required Calf 3/8" (1cm) Thick: 4 RequiredCarlos RamirezNoch keine Bewertungen
- Grizzly g0463 MDokument40 SeitenGrizzly g0463 MCarlos RamirezNoch keine Bewertungen
- Gencata 4 LDokument74 SeitenGencata 4 LCarlos RamirezNoch keine Bewertungen
- Cutter GuideDokument1 SeiteCutter GuideCarlos RamirezNoch keine Bewertungen
- Flying ShearDokument5 SeitenFlying ShearCarlos RamirezNoch keine Bewertungen
- Upper Reading FullTestDokument15 SeitenUpper Reading FullTestvnam_19Noch keine Bewertungen
- Robotiq Palletizing: SolutionDokument97 SeitenRobotiq Palletizing: SolutionKien Nguyen TrungNoch keine Bewertungen
- MagPi82 PDFDokument100 SeitenMagPi82 PDFAnonymous WNN7Hujl100% (1)
- The Threefold Conspiracy - Part 2 of 6 - Flight of The SleepersDokument68 SeitenThe Threefold Conspiracy - Part 2 of 6 - Flight of The SleepersLeonardo Souza AlvesNoch keine Bewertungen
- Design and Simulation of A Dual-Arm Robot For Manufacturing Operations in The Railcar IndustryDokument14 SeitenDesign and Simulation of A Dual-Arm Robot For Manufacturing Operations in The Railcar IndustryFelix AleNoch keine Bewertungen
- Welding Robots Technology System Issues and Applications - J Norberto PiresDokument76 SeitenWelding Robots Technology System Issues and Applications - J Norberto PireshetpinNoch keine Bewertungen
- Artificial Intelligence TutorialDokument14 SeitenArtificial Intelligence TutorialJohnNoch keine Bewertungen
- Annotated BibliographyDokument8 SeitenAnnotated BibliographyMichele Belue100% (1)
- Industrial RoboticsDokument19 SeitenIndustrial Roboticsthanh_cdt01Noch keine Bewertungen
- Session 5 English For LogisticsDokument7 SeitenSession 5 English For Logisticstuyetnganthpttanhiep2003Noch keine Bewertungen
- The Robots Are Coming The Robots Are ComingDokument5 SeitenThe Robots Are Coming The Robots Are Comingapi-272551013Noch keine Bewertungen
- CH1-Intro To Mobile Robot and LocomotionDokument51 SeitenCH1-Intro To Mobile Robot and LocomotionMuhammad Anaz'sNoch keine Bewertungen
- INSPECTOR SYSTEMS - Ultrasonic Inspection RobotsDokument2 SeitenINSPECTOR SYSTEMS - Ultrasonic Inspection RobotsboisolivierNoch keine Bewertungen
- Robot System SolutionDokument20 SeitenRobot System Solutionanon_670965762Noch keine Bewertungen
- IRC5-Getting Started 3HAC021564-001, Rev D, enDokument47 SeitenIRC5-Getting Started 3HAC021564-001, Rev D, enadriano_falavinha9186Noch keine Bewertungen
- Wo2018039337a1 PDFDokument62 SeitenWo2018039337a1 PDFVishnu WishNoch keine Bewertungen
- R-30iB PMC Manual (B-83254EN 01)Dokument520 SeitenR-30iB PMC Manual (B-83254EN 01)Sem FadeyNoch keine Bewertungen
- What Is Robotics History of Robotics Scope of Robotics Advantages Disadvantages ApplicationsDokument12 SeitenWhat Is Robotics History of Robotics Scope of Robotics Advantages Disadvantages Applicationss suhas gowdaNoch keine Bewertungen
- Master Thesis Topics in RoboticsDokument8 SeitenMaster Thesis Topics in Roboticsdpknvhvy100% (2)
- Wireless Bomb Defusing Robot With Camera InterfacingDokument4 SeitenWireless Bomb Defusing Robot With Camera InterfacingijsretNoch keine Bewertungen
- Analysis, Interpretation and Planning For The Impact of Artificial IntelligenceDokument8 SeitenAnalysis, Interpretation and Planning For The Impact of Artificial Intelligenceapi-562131193Noch keine Bewertungen
- I. How Will The Rise of Artificial Intelligence and Technology Be The End of CapitalismDokument39 SeitenI. How Will The Rise of Artificial Intelligence and Technology Be The End of CapitalismAndrea Gural De GuzmanNoch keine Bewertungen
- STS Chapter 7 Outline and ReviewerDokument5 SeitenSTS Chapter 7 Outline and ReviewerClarke MaxwellNoch keine Bewertungen
- Design and Development of One Degree of Freedom Upper Limb ExoskeletonDokument6 SeitenDesign and Development of One Degree of Freedom Upper Limb ExoskeletonWarnithaNoch keine Bewertungen
- LRMate 100 IDokument2 SeitenLRMate 100 IcalimovNoch keine Bewertungen
- Modeling and Simulation of A Moving Robot Arm Mounted On WheelchairDokument5 SeitenModeling and Simulation of A Moving Robot Arm Mounted On WheelchairM Rameez Ur RehmanNoch keine Bewertungen
- Task-Agnostic Self-Modeling MachinesDokument3 SeitenTask-Agnostic Self-Modeling MachinesYilei zhangNoch keine Bewertungen
- Automation and RoboticsDokument23 SeitenAutomation and RoboticsvvipmembersNoch keine Bewertungen
- Balancing RobotDokument5 SeitenBalancing RobotMilton MuñozNoch keine Bewertungen
- Conveyor Tracking Nx100 YaskawaDokument93 SeitenConveyor Tracking Nx100 YaskawaAnonymous 0WUktHN0Noch keine Bewertungen