Das könnte Ihnen auch gefallen
- CAP 6 372 DDokument34 SeitenCAP 6 372 DMauricio TarquinoNoch keine Bewertungen
- Retratos Fase y OscilacionesDokument12 SeitenRetratos Fase y OscilacionesRicardo RMNoch keine Bewertungen
- Modelizacion y Simulacion de Sistemas DinamicosDokument41 SeitenModelizacion y Simulacion de Sistemas DinamicosZuriel MontielNoch keine Bewertungen
- D2 Subespacios Vectoriales-1Dokument27 SeitenD2 Subespacios Vectoriales-1Stefany Lioshy Aparicio HuamanNoch keine Bewertungen
- IPD410 Tarea 0 PetrowitschPablo2Dokument8 SeitenIPD410 Tarea 0 PetrowitschPablo2Pablo Petrowitsch CrignolaNoch keine Bewertungen
- Universidad Tecnica de Manabi AlgebraaaDokument15 SeitenUniversidad Tecnica de Manabi AlgebraaaKevin GanchozoNoch keine Bewertungen
- C13 Valores Vectores PropiosDokument37 SeitenC13 Valores Vectores PropiosGonzalo Salvador GuevaraNoch keine Bewertungen
- Ecuaciones Diferenciales OrdinariasDokument7 SeitenEcuaciones Diferenciales OrdinariasDaniel PazNoch keine Bewertungen
- Ecuación de CauchyDokument11 SeitenEcuación de CauchyRockeritap LindawNoch keine Bewertungen
- Tensores cartesianos transformaciones coordenadasDokument6 SeitenTensores cartesianos transformaciones coordenadascristianNoch keine Bewertungen
- Rotación cónicasDokument3 SeitenRotación cónicasalbertNoch keine Bewertungen
- Retratos de Fase y EstabilidadDokument18 SeitenRetratos de Fase y EstabilidadjoserayanNoch keine Bewertungen
- AL Esp Vect 9Dokument7 SeitenAL Esp Vect 9daya.vampire.nightNoch keine Bewertungen
- Elipses y Álgebra LinealDokument19 SeitenElipses y Álgebra LinealAmIn20122Noch keine Bewertungen
- Ecuaciones Diferenciales LinealesDokument10 SeitenEcuaciones Diferenciales LinealesOttoHinderNoch keine Bewertungen
- Unidad 4. (4.1-4.3) ChicosDokument8 SeitenUnidad 4. (4.1-4.3) ChicosadrianNoch keine Bewertungen
- Espacios VectorialesDokument14 SeitenEspacios VectorialesPedroNoch keine Bewertungen
- Transformación de Galileo a Lorentz: Teorías de la relatividadDokument5 SeitenTransformación de Galileo a Lorentz: Teorías de la relatividadFernando Aleisy GonzalezNoch keine Bewertungen
- Algebra Lineal BasicaDokument13 SeitenAlgebra Lineal BasicaEdmy IraisNoch keine Bewertungen
- AL2020 Cap2 3ra Parte SinpausasDokument36 SeitenAL2020 Cap2 3ra Parte SinpausaserikNoch keine Bewertungen
- Conferencia 4 - Espacios Vectoriales (Subespacio Combinación Lineal Dependencia)Dokument6 SeitenConferencia 4 - Espacios Vectoriales (Subespacio Combinación Lineal Dependencia)Alejandro Reyes batistaNoch keine Bewertungen
- Álgebra 27 - CBC - Capitulo - 4Dokument69 SeitenÁlgebra 27 - CBC - Capitulo - 4Bruno BarriosNoch keine Bewertungen
- Glosario TerminadoDokument7 SeitenGlosario Terminado009andreaNoch keine Bewertungen
- Page1 13Dokument13 SeitenPage1 13Juan GonzalesNoch keine Bewertungen
- Espacios VectorialesDokument15 SeitenEspacios Vectorialesvictor manuel vergara duarteNoch keine Bewertungen
- Algebra Lineal Parte 2ADokument26 SeitenAlgebra Lineal Parte 2AHeidi Fernanda Segura SánchezNoch keine Bewertungen
- PEC02 18s PDFDokument6 SeitenPEC02 18s PDFJorge SánchezNoch keine Bewertungen
- Ecuaciones Diferenciales Lineales de Segundo OrdenDokument30 SeitenEcuaciones Diferenciales Lineales de Segundo OrdenAnthony Gutierrez100% (1)
- Espacios VectorialesDokument17 SeitenEspacios VectorialesEsau osorioNoch keine Bewertungen
- 297 EcparcialesDokument13 Seiten297 EcparcialesRoberto DavilaNoch keine Bewertungen
- Sistemas de Ecuaciones 3eso Ramiro 2 1Dokument22 SeitenSistemas de Ecuaciones 3eso Ramiro 2 1aracely.sanchezgro21Noch keine Bewertungen
- Estabilidad LyapunovDokument10 SeitenEstabilidad LyapunovSantiago Vergara HernandezNoch keine Bewertungen
- Ecuaciones LinealesDokument19 SeitenEcuaciones LinealesJaime Sarmiento ZegarraNoch keine Bewertungen
- Clase 15 - 2020 Combinaciones Lineales - LI-LDDokument14 SeitenClase 15 - 2020 Combinaciones Lineales - LI-LDMar MoralesNoch keine Bewertungen
- Valores Frontera PDFDokument6 SeitenValores Frontera PDFAlesha WestNoch keine Bewertungen
- Demostracion AlgebraDokument3 SeitenDemostracion Algebrada1031soNoch keine Bewertungen
- Capítulo 6Dokument10 SeitenCapítulo 6Eduardo Gindel LadowskiNoch keine Bewertungen
- Algebra Lineal ROSARIO URIBE MARQUEZDokument9 SeitenAlgebra Lineal ROSARIO URIBE MARQUEZPierina NorabuenaNoch keine Bewertungen
- Unidad 4 Algebra LinealDokument14 SeitenUnidad 4 Algebra Linealjgortizfdez100% (2)
- Sistema de Ecuaciones Diferenciales: 1.1 IntroducciónDokument12 SeitenSistema de Ecuaciones Diferenciales: 1.1 IntroducciónJhostin Joel Alvarez VargasNoch keine Bewertungen
- Algrabra Unidad 5 - Espacios VectorialesDokument15 SeitenAlgrabra Unidad 5 - Espacios VectorialesHector PerezNoch keine Bewertungen
- Regresión Lineal Múltiple - RLMDokument14 SeitenRegresión Lineal Múltiple - RLMYober Arteaga IreneNoch keine Bewertungen
- Sistema de Ec. Lineales Diferenciales - Solución General y ParticualDokument14 SeitenSistema de Ec. Lineales Diferenciales - Solución General y ParticualAlo GragedaNoch keine Bewertungen
- Teoria SistemasDokument11 SeitenTeoria SistemasGorky Limachi CcapaNoch keine Bewertungen
- Tarea. Sistemas Discretos. Liapunov.Dokument10 SeitenTarea. Sistemas Discretos. Liapunov.Victor JuárezNoch keine Bewertungen
- AED-Tema 4-Espacios VectorialesDokument21 SeitenAED-Tema 4-Espacios VectorialesAndrés Fdo RomeroNoch keine Bewertungen
- Vectores, Rectas y PlanosDokument14 SeitenVectores, Rectas y PlanosLeonardo PiconNoch keine Bewertungen
- Espacios vectorialesDokument43 SeitenEspacios vectorialesKarla Isabel Salgado SánchezNoch keine Bewertungen
- Espacios VectorialesDokument11 SeitenEspacios Vectorialesapi-3746112100% (6)
- Pozo Cuadrado Fisica CuánticaDokument7 SeitenPozo Cuadrado Fisica CuánticaKevin CANoch keine Bewertungen
- Notas Teóricas Unidad 2Dokument18 SeitenNotas Teóricas Unidad 2Enrique Fernandini MatosNoch keine Bewertungen
- 6 DiagramaDokument7 Seiten6 DiagramaIleana ContrerasNoch keine Bewertungen
- Espacio Vectorial ACTUALIZADO (Autoguardado)Dokument45 SeitenEspacio Vectorial ACTUALIZADO (Autoguardado)Leonardo CamposNoch keine Bewertungen
- Espacios VectorialesDokument9 SeitenEspacios VectorialesJoel HuillcaNoch keine Bewertungen
- Redes Neuronales 04Dokument74 SeitenRedes Neuronales 04Jessica LilianNoch keine Bewertungen
- Mat IIIGuion P2Dokument6 SeitenMat IIIGuion P2Marcos BarcelonaNoch keine Bewertungen
- Espacios vectoriales: definición, ejemplos y subespaciosDokument6 SeitenEspacios vectoriales: definición, ejemplos y subespaciosMariaCamilaSanchezGomezNoch keine Bewertungen
- Ejercicios de Ecuaciones Diferenciales OrdinariasVon EverandEjercicios de Ecuaciones Diferenciales OrdinariasBewertung: 4 von 5 Sternen4/5 (1)
- DibujosDokument7 SeitenDibujosmardel11Noch keine Bewertungen
- EGGUIA2índices (081) ProfDokument4 SeitenEGGUIA2índices (081) Profmardel11Noch keine Bewertungen
- Cambio Do Mi Cilio TerceroDokument1 SeiteCambio Do Mi Cilio Terceromardel11Noch keine Bewertungen
- Syllabus Catolica Calculo Fisica MBasicaDokument10 SeitenSyllabus Catolica Calculo Fisica MBasicamardel11Noch keine Bewertungen
- Laborat3 (09 2)Dokument3 SeitenLaborat3 (09 2)mardel11Noch keine Bewertungen
- Tama o de MuestraDokument4 SeitenTama o de Muestramardel11Noch keine Bewertungen
- Laborat3 (09 2)Dokument3 SeitenLaborat3 (09 2)mardel11Noch keine Bewertungen
- Hugo Medina GuzmanDokument250 SeitenHugo Medina GuzmanYulander JimenezNoch keine Bewertungen
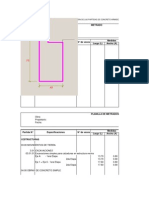
- Metrado IieeDokument11 SeitenMetrado Iieemardel11Noch keine Bewertungen
- Problemas Resueltos de Newton Sears Zemansky, Halliday Resnick, SerwayDokument106 SeitenProblemas Resueltos de Newton Sears Zemansky, Halliday Resnick, SerwayJunior84% (38)
- HMP PDFDokument14 SeitenHMP PDFAliaga Alvaro WilsonNoch keine Bewertungen
- EDICION235Dokument24 SeitenEDICION235mardel11Noch keine Bewertungen
- Ejercicio 2 SolverDokument14 SeitenEjercicio 2 SolverGabriel Jaime Vasco AyalaNoch keine Bewertungen
- Física PDFDokument110 SeitenFísica PDFJose Wilson Quintero Bedoya100% (2)
- Algebra Ejercicios ResueltosDokument109 SeitenAlgebra Ejercicios ResueltosDiego Terán100% (1)
- Exams Mates III LadeDokument132 SeitenExams Mates III LadeGabo Cruz NavarreteNoch keine Bewertungen
- EDICION236Dokument24 SeitenEDICION236mardel11Noch keine Bewertungen
- PROCEDIMIENTOPARAMETRARCONAUTOCAD2005Dokument6 SeitenPROCEDIMIENTOPARAMETRARCONAUTOCAD2005Carlos CastroNoch keine Bewertungen
- Est A Bi Lid AdDokument15 SeitenEst A Bi Lid AdbabachoNoch keine Bewertungen
- Metrados de Tratamiento ExteriorDokument16 SeitenMetrados de Tratamiento Exteriormardel11Noch keine Bewertungen
- Metrados de Tratamiento Exterior-Sin GraficosDokument9 SeitenMetrados de Tratamiento Exterior-Sin Graficosmardel11Noch keine Bewertungen
- Syllabus Catolica Calculo Fisica MBasicaDokument10 SeitenSyllabus Catolica Calculo Fisica MBasicamardel11Noch keine Bewertungen
- LogicaDokument90 SeitenLogicaRoyer Joél Cieza TicllaNoch keine Bewertungen
- Optimizacion - Programacion Lineal y No LinealDokument160 SeitenOptimizacion - Programacion Lineal y No LinealMiguel AcbNoch keine Bewertungen
- Calculo Diferencial Integral Func Una VarDokument688 SeitenCalculo Diferencial Integral Func Una VarLudmiller van MoranNoch keine Bewertungen
- Curso Basico de Teoria de La Medida-Roger MetzgerDokument87 SeitenCurso Basico de Teoria de La Medida-Roger MetzgerKevin Juan Román Rafaele100% (1)
- Semana 2 - ElasticidadesDokument15 SeitenSemana 2 - Elasticidadesmardel11Noch keine Bewertungen
- Hoja de Ejercicios Grado Recursos Civil MatematicasDokument83 SeitenHoja de Ejercicios Grado Recursos Civil MatematicasAlexandroARdzNoch keine Bewertungen
- Serie de PotenciasDokument17 SeitenSerie de Potenciasmardel11Noch keine Bewertungen
- Transformacion de CoordenadasDokument11 SeitenTransformacion de Coordenadasmardel11Noch keine Bewertungen
- Clase FundamentosDokument64 SeitenClase FundamentosZitlal-lin VictoriaNoch keine Bewertungen
- Procedimiento de Trabajo - Reparación de FisurasDokument12 SeitenProcedimiento de Trabajo - Reparación de FisurassaeedNoch keine Bewertungen
- Silabo Cirana IDokument7 SeitenSilabo Cirana IjassaNoch keine Bewertungen
- Teorias AtomicasDokument2 SeitenTeorias AtomicasHabacuc HernandezNoch keine Bewertungen
- Balance energía sistema abiertoDokument33 SeitenBalance energía sistema abiertoShedenka Mishel Perez LluscoNoch keine Bewertungen
- Ejercicios Complementarios #1 Ecuación No LinealDokument2 SeitenEjercicios Complementarios #1 Ecuación No LinealKathleen Ayala ConsueloNoch keine Bewertungen
- Evaluacion de RiesgosDokument10 SeitenEvaluacion de RiesgosElizabeth Marleni Gonzales CcantoNoch keine Bewertungen
- Estocastico DefinicionDokument5 SeitenEstocastico DefinicionMichelle IsabelNoch keine Bewertungen
- Examenes Compras y AprovisionamientoDokument26 SeitenExamenes Compras y AprovisionamientoGerencia EstrategicaNoch keine Bewertungen
- 2.6 Aplicaciones Ecuaciones Lineales y CuadráticasDokument29 Seiten2.6 Aplicaciones Ecuaciones Lineales y CuadráticaserikNoch keine Bewertungen
- Determinación de constantes de ionización y acidez en vino mediante titulaciones potenciométricasDokument11 SeitenDeterminación de constantes de ionización y acidez en vino mediante titulaciones potenciométricashugoNoch keine Bewertungen
- Fundamentos2013 HiperbolaDokument5 SeitenFundamentos2013 HiperbolaDavid BlancoNoch keine Bewertungen
- Arco Eléctrico PDFDokument19 SeitenArco Eléctrico PDFWillian TemocheNoch keine Bewertungen
- Análisis de Objeto Técnico El BoilerDokument12 SeitenAnálisis de Objeto Técnico El BoilerIng. Gerardo Sánchez Nájera100% (9)
- Suma de Vectores Por El Me Todo Anali Tico o Componentes RectangularesDokument22 SeitenSuma de Vectores Por El Me Todo Anali Tico o Componentes RectangularesedisoncampoverdeNoch keine Bewertungen
- Práctica 7 Acidez de Los Cationes MetalicosDokument5 SeitenPráctica 7 Acidez de Los Cationes MetalicosAndrés ArganisNoch keine Bewertungen
- 5 TamizadoDokument71 Seiten5 TamizadoDiegoAlejandroAvilaRinconNoch keine Bewertungen
- Posibilidad de Construccion Con Adobe en El Casco Urbano FinalDokument54 SeitenPosibilidad de Construccion Con Adobe en El Casco Urbano FinalllangiellNoch keine Bewertungen
- Factores de Gradiente AritmeticoDokument4 SeitenFactores de Gradiente AritmeticoValentina CedielNoch keine Bewertungen
- Tecnológico Nacional de México - Transferencia de CalorDokument3 SeitenTecnológico Nacional de México - Transferencia de CalorAdrian CastroNoch keine Bewertungen
- Evaluación Movimientos de La TierraDokument4 SeitenEvaluación Movimientos de La TierraClau GuzmánNoch keine Bewertungen
- Dimensionamiento Ubicacion Valvulas de Aire PDFDokument45 SeitenDimensionamiento Ubicacion Valvulas de Aire PDFJohn E Cutipa L0% (1)
- TPMG-2020 - 04 - Punto, Linea y FormaDokument9 SeitenTPMG-2020 - 04 - Punto, Linea y FormaSebastián PrevotelNoch keine Bewertungen
- Actividad de Aprendizaje 2 - Cuadro Comparativo de La Filosofía PresocráticaDokument2 SeitenActividad de Aprendizaje 2 - Cuadro Comparativo de La Filosofía PresocráticaJuan Carlos Gonzalez Requena88% (8)
- Ex Final TEMDokument3 SeitenEx Final TEMExams 1997Noch keine Bewertungen
- Estabilidad de Una BarcazaDokument8 SeitenEstabilidad de Una BarcazaAna Maria Gomez PlazasNoch keine Bewertungen
- Razones MetrologicaDokument6 SeitenRazones MetrologicaJonatan BuitragoNoch keine Bewertungen
- Solicitud de Factibilidad de Servicio y Punto de ConexiónDokument2 SeitenSolicitud de Factibilidad de Servicio y Punto de ConexiónMabel Lazo ArevaloNoch keine Bewertungen
- Movimiento Armonico Simple 2Dokument3 SeitenMovimiento Armonico Simple 2GermAn MuchavisoyNoch keine Bewertungen
- Termorociado PDFDokument130 SeitenTermorociado PDFJean Carlos CabreraNoch keine Bewertungen