Das könnte Ihnen auch gefallen
- Annie QuestionnaireDokument3 SeitenAnnie QuestionnaireAnnie RachelNoch keine Bewertungen
- Bob MRP QuessionnaireDokument5 SeitenBob MRP QuessionnaireAnnie RachelNoch keine Bewertungen
- (165406158) 1Dokument22 Seiten(165406158) 1Annie RachelNoch keine Bewertungen
- Bob Final Term PaperDokument9 SeitenBob Final Term PaperAnnie RachelNoch keine Bewertungen
- Impact of Advertisement On Consumer Buying Behaviour TowardsDokument16 SeitenImpact of Advertisement On Consumer Buying Behaviour TowardsAnnie RachelNoch keine Bewertungen
- Bob MRP QuessionnaireDokument5 SeitenBob MRP QuessionnaireAnnie RachelNoch keine Bewertungen
- Designing Salary Matrix for IBM (20 charactersDokument12 SeitenDesigning Salary Matrix for IBM (20 charactersAnnie RachelNoch keine Bewertungen
- (181282663) Din Article 2Dokument5 Seiten(181282663) Din Article 2Annie RachelNoch keine Bewertungen
- Bob SMT ReportDokument8 SeitenBob SMT ReportAnnie RachelNoch keine Bewertungen
- The Three Levels of Strategic PlanningDokument6 SeitenThe Three Levels of Strategic PlanningAnnie RachelNoch keine Bewertungen
- Brand LoyaltyDokument13 SeitenBrand LoyaltyAnnie RachelNoch keine Bewertungen
- The Three Levels of Strategic PlanningDokument6 SeitenThe Three Levels of Strategic PlanningAnnie RachelNoch keine Bewertungen
- Din Research ProposalDokument14 SeitenDin Research ProposalAnnie RachelNoch keine Bewertungen
- Designing Salary Matrix for IBM (20 charactersDokument12 SeitenDesigning Salary Matrix for IBM (20 charactersAnnie RachelNoch keine Bewertungen
- Designing Salary Matrix for IBM (20 charactersDokument12 SeitenDesigning Salary Matrix for IBM (20 charactersAnnie RachelNoch keine Bewertungen
- 3 Phase Transformer ConnectionsDokument7 Seiten3 Phase Transformer ConnectionsRishi Kant SharmaNoch keine Bewertungen
- Investment Decision Under Conditions of UncertainityDokument15 SeitenInvestment Decision Under Conditions of UncertainityjassubharathiNoch keine Bewertungen
- Measurements Lab Manual PDFDokument56 SeitenMeasurements Lab Manual PDFAnnie Rachel100% (2)
- Im ConstructionDokument11 SeitenIm ConstructionAnnie RachelNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 5-Unsymmetrical Fault AnalysisDokument5 Seiten5-Unsymmetrical Fault Analysisvirenpandya0% (1)
- Touareg FL Dimensions PDFDokument2 SeitenTouareg FL Dimensions PDFZeljko PekicNoch keine Bewertungen
- PFR Lime Kiln Process With Blast Furnace Gas and OxygenDokument4 SeitenPFR Lime Kiln Process With Blast Furnace Gas and OxygenVitor Godoy100% (1)
- Quantitative Reasoning: Factors, HCF & LCM, FactorialsDokument2 SeitenQuantitative Reasoning: Factors, HCF & LCM, FactorialsNaman JainNoch keine Bewertungen
- CNT SVX15D E4 1111Dokument60 SeitenCNT SVX15D E4 1111Mihai IavorschiNoch keine Bewertungen
- Advisor Webcast Exadata Disk Management and Troubleshotting Tips FinalDokument84 SeitenAdvisor Webcast Exadata Disk Management and Troubleshotting Tips FinalethenhuntNoch keine Bewertungen
- GH Chap 78 - Insulin, Glucagon and DMDokument16 SeitenGH Chap 78 - Insulin, Glucagon and DMShellz2428Noch keine Bewertungen
- Lab 2 ECADokument7 SeitenLab 2 ECAAizan AhmedNoch keine Bewertungen
- Carbohydrates Explained: Monosaccharides, Disaccharides and PolysaccharidesDokument21 SeitenCarbohydrates Explained: Monosaccharides, Disaccharides and PolysaccharidesJhayce Christian S. CapanayanNoch keine Bewertungen
- Holiday Assignment XDokument2 SeitenHoliday Assignment XMonis ShaikhNoch keine Bewertungen
- SE Unit - 1Dokument30 SeitenSE Unit - 1Sanketh KanuguNoch keine Bewertungen
- Historia de CatastroDokument7 SeitenHistoria de CatastroMiki Sulca SosaNoch keine Bewertungen
- AS TRONIC, The ZF-AS TRONIC Software Can Be: 4.7.6 EOL Programming Documentation of The EOL ProgrammingDokument3 SeitenAS TRONIC, The ZF-AS TRONIC Software Can Be: 4.7.6 EOL Programming Documentation of The EOL ProgrammingThylaneNoch keine Bewertungen
- Design of RC Building - ExerciseDokument6 SeitenDesign of RC Building - Exercisesajeerala100% (1)
- Beyond SVGFDokument66 SeitenBeyond SVGFLiliana QueiroloNoch keine Bewertungen
- HMT Data Book-kothandaramanDokument2 SeitenHMT Data Book-kothandaramanNikhil T G0% (1)
- KUKA Sim 30 Installation enDokument49 SeitenKUKA Sim 30 Installation enRégis Naydo0% (1)
- The Importance of Calculators in Math ClassDokument6 SeitenThe Importance of Calculators in Math Classchloe shanice bordiosNoch keine Bewertungen
- Philippine Electronics Code - Volume 1Dokument28 SeitenPhilippine Electronics Code - Volume 1Ishimaru Thor100% (1)
- Land Based SensorsDokument40 SeitenLand Based SensorsJ.MichaelLooneyNoch keine Bewertungen
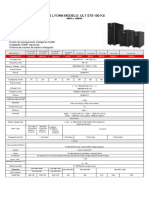
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADokument1 SeiteUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzNoch keine Bewertungen
- ATR 72 - Flight ManualDokument490 SeitenATR 72 - Flight Manualmuya78100% (1)
- Deformation of Ceramics and PolymersDokument41 SeitenDeformation of Ceramics and PolymersJane Erestain BuenaobraNoch keine Bewertungen
- Single Point of Failure (SPOF) Transmission - MaintenanceDokument10 SeitenSingle Point of Failure (SPOF) Transmission - MaintenanceInam M. KhanNoch keine Bewertungen
- HP Application Lifecycle Management Readme: What's New Installation InstructionsDokument36 SeitenHP Application Lifecycle Management Readme: What's New Installation InstructionsBrandon GarciaNoch keine Bewertungen
- HP LaserJet 5P - 6P Service Manual (Proper)Dokument116 SeitenHP LaserJet 5P - 6P Service Manual (Proper)maroudasp100% (1)
- PSAB Product ManualDokument4 SeitenPSAB Product ManualArnold StevenNoch keine Bewertungen
- MB Truck Explorer Manual GB PDFDokument117 SeitenMB Truck Explorer Manual GB PDFاحمد ابو عبداللهNoch keine Bewertungen
- Cagayan State University: Republic of The PhilippinesDokument21 SeitenCagayan State University: Republic of The PhilippinesblessaNoch keine Bewertungen
- 226 The O-CellDokument5 Seiten226 The O-CellEvandro SantiagoNoch keine Bewertungen