Das könnte Ihnen auch gefallen
- Poema Del IngenieroDokument2 SeitenPoema Del IngenieroGabo Gómez100% (1)
- Teoria de FatigaDokument124 SeitenTeoria de FatigaAllison JonesNoch keine Bewertungen
- Estructura de Alma LlenaDokument35 SeitenEstructura de Alma LlenaJhonny SanchezNoch keine Bewertungen
- Formulario de VigasDokument30 SeitenFormulario de VigasHugo Sánchez100% (1)
- VigasDokument28 SeitenVigasCarlos DanielNoch keine Bewertungen
- Barba AzulDokument5 SeitenBarba AzulGabo GómezNoch keine Bewertungen
- El Gran Oso Pardo Que Nunca Se EnfadabaDokument10 SeitenEl Gran Oso Pardo Que Nunca Se EnfadabaGabo GómezNoch keine Bewertungen
- Presentacion 1Dokument4 SeitenPresentacion 1Gabo GómezNoch keine Bewertungen
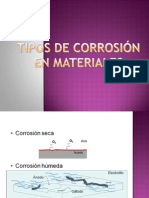
- Tipos de CorrosiónDokument36 SeitenTipos de CorrosiónGabo GómezNoch keine Bewertungen
- Los 3 CerditosDokument3 SeitenLos 3 CerditosGabo GómezNoch keine Bewertungen
- Barba AzulDokument5 SeitenBarba AzulGabo GómezNoch keine Bewertungen
- Abdula y El GenioDokument5 SeitenAbdula y El GenioGabo GómezNoch keine Bewertungen
- El OidoDokument1 SeiteEl OidoGabo GómezNoch keine Bewertungen
- Guia League of LegendsDokument85 SeitenGuia League of LegendsSusan Hughes100% (3)
- El Aseo PersonalDokument1 SeiteEl Aseo PersonalGabo GómezNoch keine Bewertungen
- Física Principios de Electricidad y Magnetismo - Héctor Barco, Edilberto RojasDokument341 SeitenFísica Principios de Electricidad y Magnetismo - Héctor Barco, Edilberto RojasEdrei R.S100% (2)
- Analisis Dimensional Academia Uni IngDokument4 SeitenAnalisis Dimensional Academia Uni IngJorge Sotomayor100% (3)
- EXCAM2Dokument2 SeitenEXCAM2Melissa VasquezNoch keine Bewertungen
- Bombas Turbina HMSS SV HidrostalDokument47 SeitenBombas Turbina HMSS SV HidrostalNolberto De la Cruz JimenezNoch keine Bewertungen
- 3E 2tema CalorDokument11 Seiten3E 2tema CalorJuan Pablo ContrerasNoch keine Bewertungen
- Guía Del Ensayo de TracciónDokument8 SeitenGuía Del Ensayo de TracciónKelvin ToasaNoch keine Bewertungen
- Combinados Mohr - ResueltoDokument14 SeitenCombinados Mohr - ResueltoJulian Humberto Guzman SanchezNoch keine Bewertungen
- Problema Tema 4Dokument15 SeitenProblema Tema 4ockes12Noch keine Bewertungen
- Corte Por Plasma ComparativaDokument6 SeitenCorte Por Plasma ComparativaEduardoNoch keine Bewertungen
- (MRUA) EjemploDokument14 Seiten(MRUA) EjemploCristian MolanoNoch keine Bewertungen
- CARATULADokument30 SeitenCARATULAAngel GonzalezNoch keine Bewertungen
- Tipos de Esfuerzos Miguel González Díaz 20100430 5FDokument5 SeitenTipos de Esfuerzos Miguel González Díaz 20100430 5FSebastián González diazNoch keine Bewertungen
- Tippens Fisica 7e Diapositivas 31bDokument29 SeitenTippens Fisica 7e Diapositivas 31bGabriel WardNoch keine Bewertungen
- Botadura Lateral PDFDokument198 SeitenBotadura Lateral PDFJonathan RamseyNoch keine Bewertungen
- Coriolis IsDokument5 SeitenCoriolis Isusers19Noch keine Bewertungen
- Electroiman InformeDokument8 SeitenElectroiman InformeCamilo Ortega ManjarresNoch keine Bewertungen
- Movimientos Johan Gregorio.Dokument10 SeitenMovimientos Johan Gregorio.Johan Gregorio BautistaNoch keine Bewertungen
- Cálculo de Caudal de Agua en TuberíaDokument9 SeitenCálculo de Caudal de Agua en TuberíachaquishcaNoch keine Bewertungen
- Informe de Práctica 6 - Ronny DomínguezDokument8 SeitenInforme de Práctica 6 - Ronny DomínguezRonny Alexander Dominguez UtrerasNoch keine Bewertungen
- Corriente EléctricaDokument14 SeitenCorriente EléctricaMiguel Luna PerezNoch keine Bewertungen
- Din Clase 0313 - Cinas de La Part - vCLASEDokument67 SeitenDin Clase 0313 - Cinas de La Part - vCLASEI H8 U DÉCÈSNoch keine Bewertungen
- Carrusel A Base de MotorDokument6 SeitenCarrusel A Base de MotorDIANA MARCELA SOTABAN ALFEREZNoch keine Bewertungen
- Evaluación Diagnóstica - FISICA II AreandidaDokument7 SeitenEvaluación Diagnóstica - FISICA II AreandidaAngi TorNoch keine Bewertungen
- Dinamica HidraulicaDokument42 SeitenDinamica HidraulicaAnonymous O45OKHlNoch keine Bewertungen
- Fisica I - Mcu - Mcuv - 24 EneDokument6 SeitenFisica I - Mcu - Mcuv - 24 EneAbiud Cruz VelasquezNoch keine Bewertungen
- Actividad #1 - Caída LibreDokument4 SeitenActividad #1 - Caída LibreBastian CarNoch keine Bewertungen
- Principios de ArquimidesDokument13 SeitenPrincipios de ArquimidesTatiana SantamaríaNoch keine Bewertungen
- U2-1 Análisis Dinámico de Sistemas de 1GDLDokument57 SeitenU2-1 Análisis Dinámico de Sistemas de 1GDLJORGE DE LA CRUZ GUTIERREZNoch keine Bewertungen
- Rotabilidad de Mecanismos (5878)Dokument20 SeitenRotabilidad de Mecanismos (5878)Angy HidalgoNoch keine Bewertungen
- Demostración de La Ecuación de Estado Van Der WaalsDokument4 SeitenDemostración de La Ecuación de Estado Van Der WaalsRonald Nilson CA100% (1)