Das könnte Ihnen auch gefallen
- Peukert Equation Calculator Peukert's Exponent Batt Capacity at Hour Rating Peukert Total Amp Corrected Hours Time Amps Available Discharge Rate 1.4Dokument6 SeitenPeukert Equation Calculator Peukert's Exponent Batt Capacity at Hour Rating Peukert Total Amp Corrected Hours Time Amps Available Discharge Rate 1.4mrsploogeNoch keine Bewertungen
- Book: Power Electronics and Motor Control. Authors: W. Shepherd Et Al Edition: II Ed. Suggested Sections For ELEC 482Dokument2 SeitenBook: Power Electronics and Motor Control. Authors: W. Shepherd Et Al Edition: II Ed. Suggested Sections For ELEC 482mrsploogeNoch keine Bewertungen
- Motor Load InteractionDokument14 SeitenMotor Load Interactionmrsplooge0% (1)
- Phase Controlled DrivesDokument26 SeitenPhase Controlled DrivesmrsploogeNoch keine Bewertungen
- Switch LossesDokument24 SeitenSwitch LossesmrsploogeNoch keine Bewertungen
- Homework # 3 SolutionsDokument4 SeitenHomework # 3 SolutionsmrsploogeNoch keine Bewertungen
- s R L τ ms T: At 800 rpm,Dokument6 Seitens R L τ ms T: At 800 rpm,mrsploogeNoch keine Bewertungen
- Device DescriptionsDokument28 SeitenDevice DescriptionsmrsploogeNoch keine Bewertungen
- DC Motor Model and ControlDokument16 SeitenDC Motor Model and ControlmrsploogeNoch keine Bewertungen
- ErrataDokument1 SeiteErratamrsploogeNoch keine Bewertungen
- ELEC 482 Module # 5 Outline TOPIC: DC Chopper DrivesDokument38 SeitenELEC 482 Module # 5 Outline TOPIC: DC Chopper DrivesmrsploogeNoch keine Bewertungen
- DC Motor Model and ControlDokument16 SeitenDC Motor Model and ControlmrsploogeNoch keine Bewertungen
- ELEC 482 Module # 5 Outline TOPIC: DC Chopper DrivesDokument38 SeitenELEC 482 Module # 5 Outline TOPIC: DC Chopper DrivesmrsploogeNoch keine Bewertungen
- Lab 2Dokument132 SeitenLab 2mrsploogeNoch keine Bewertungen
- VPS Copy PasteDokument1 SeiteVPS Copy PastemrsploogeNoch keine Bewertungen
- Chiras Jan16Dokument30 SeitenChiras Jan16mrsploogeNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Low Voltage Switchgear and Control Gear Application GuideDokument152 SeitenLow Voltage Switchgear and Control Gear Application GuideAntonio MejiaNoch keine Bewertungen
- Alternator Transpo RegulatorDokument407 SeitenAlternator Transpo Regulatoruli12345678100% (4)
- Click Here To Join To Download Our App Follow Us On Facebook Follow Us On InstagramDokument12 SeitenClick Here To Join To Download Our App Follow Us On Facebook Follow Us On InstagramshilNoch keine Bewertungen
- August 2013Dokument23 SeitenAugust 2013MIRA JHON MICHAELNoch keine Bewertungen
- Mott Chapter 21Dokument29 SeitenMott Chapter 21kundayi shavaNoch keine Bewertungen
- AMIETE - ET (Current Scheme) : Code: Ae55 Subject: Principles of Electrical EngineeringDokument2 SeitenAMIETE - ET (Current Scheme) : Code: Ae55 Subject: Principles of Electrical EngineeringnavyaindynavyaindyNoch keine Bewertungen
- 1500reozm 0318Dokument3 Seiten1500reozm 0318Xuân Huy NguyễnNoch keine Bewertungen
- Mod 4Dokument41 SeitenMod 4Ayush AgarwalNoch keine Bewertungen
- GATE EE 2003 With SolutionsDokument72 SeitenGATE EE 2003 With SolutionssdmtsndNoch keine Bewertungen
- Magneti Marelli Motorsport Products 2016Dokument190 SeitenMagneti Marelli Motorsport Products 2016Jonathan FariasNoch keine Bewertungen
- CV Muhammad Harith Bin Abdul RahimDokument4 SeitenCV Muhammad Harith Bin Abdul RahimHarith NasrNoch keine Bewertungen
- Question Bank Ktu S7 EeeDokument56 SeitenQuestion Bank Ktu S7 EeeNihal Abdul Majeed PulathNoch keine Bewertungen
- Gep110 1104C Tag2 LL3014BDokument6 SeitenGep110 1104C Tag2 LL3014BDaniel EvansNoch keine Bewertungen
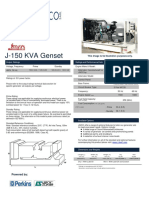
- J-150 KVA Genset: Output Ratings Ratings and Performance DataDokument4 SeitenJ-150 KVA Genset: Output Ratings Ratings and Performance DataSalehNoch keine Bewertungen
- Updated EE SyllabusDokument50 SeitenUpdated EE SyllabusHimanshu JainNoch keine Bewertungen
- Non - Conventional Sources of EnergyDokument277 SeitenNon - Conventional Sources of Energyadytza1260% (5)
- Diesel Generator Set Specifications Sheet-5 kVADokument2 SeitenDiesel Generator Set Specifications Sheet-5 kVARagz ChNoch keine Bewertungen
- Charging System k20z3Dokument34 SeitenCharging System k20z3Chanabodee KittidumrungsukNoch keine Bewertungen
- 3406 400kva STANDBY PDFDokument6 Seiten3406 400kva STANDBY PDFPablo Gaspar D'Agostini AmengualNoch keine Bewertungen
- Sanfoundry Induction MotorsDokument53 SeitenSanfoundry Induction MotorsHazel Grace del MonteNoch keine Bewertungen
- BacksTab 03Dokument155 SeitenBacksTab 03VaishnaviRaviNoch keine Bewertungen
- Sabp P 001Dokument26 SeitenSabp P 001KemoHNoch keine Bewertungen
- P501 1 (4PP) GB (0514)Dokument4 SeitenP501 1 (4PP) GB (0514)Trai Nhà NôngNoch keine Bewertungen
- EMF MethodDokument5 SeitenEMF Methodpurushg62Noch keine Bewertungen
- 3tnv88-Gge - Planta Gb-Ym12.5Dokument4 Seiten3tnv88-Gge - Planta Gb-Ym12.5jose cameloNoch keine Bewertungen
- (Catalog Microturbine) Elliott 243694440 Ta 100 PDFDokument2 Seiten(Catalog Microturbine) Elliott 243694440 Ta 100 PDFppourmoghaddamNoch keine Bewertungen
- Fault Finding Manual For Stamford AC Generators - July 2009 - CUMMINS Generator Technologies PDFDokument29 SeitenFault Finding Manual For Stamford AC Generators - July 2009 - CUMMINS Generator Technologies PDFpevare78% (9)
- Automotive Charging System: Chapter FourDokument23 SeitenAutomotive Charging System: Chapter FourIsaac TesfayeNoch keine Bewertungen
- 3516C 4160V 2250 KW Tier 4 PrimeDokument6 Seiten3516C 4160V 2250 KW Tier 4 PrimesprikitNoch keine Bewertungen
- Technical Data: 60Hz/1800R.P.M 3-Phase Power Factor Factor Cos Φ = 0.8 Emissions N/ADokument7 SeitenTechnical Data: 60Hz/1800R.P.M 3-Phase Power Factor Factor Cos Φ = 0.8 Emissions N/AJonathan CastilloNoch keine Bewertungen