Das könnte Ihnen auch gefallen
- UCCNC Software Installation and User's GuideDokument93 SeitenUCCNC Software Installation and User's GuideDanny PetoNoch keine Bewertungen
- Install Oracle Primavera PPM 6.2.1 StandaloneDokument9 SeitenInstall Oracle Primavera PPM 6.2.1 StandalonesakkhanNoch keine Bewertungen
- Benchtop Programmer - DRBIII Winflash II - User's Guide v3.0 PDFDokument35 SeitenBenchtop Programmer - DRBIII Winflash II - User's Guide v3.0 PDFNitsuga Oñesirb SavirNoch keine Bewertungen
- How to Install and Use Adobe Zii PatcherDokument11 SeitenHow to Install and Use Adobe Zii PatcherMuusa SattiNoch keine Bewertungen
- WINGPC ManualDokument81 SeitenWINGPC ManualAndre CostaNoch keine Bewertungen
- OM Riele Photometer 4040 - V5Dokument22 SeitenOM Riele Photometer 4040 - V5Nghi NguyenNoch keine Bewertungen
- Ricoh Lan Fax User ManualDokument41 SeitenRicoh Lan Fax User ManualGiorgioFreshNoch keine Bewertungen
- PEAK Drivers - 4.x - Command Line User Manual - en UsDokument19 SeitenPEAK Drivers - 4.x - Command Line User Manual - en Usburak cikirkanNoch keine Bewertungen
- UCCNC Software Installation and User's GuideDokument87 SeitenUCCNC Software Installation and User's GuideJD Structural WorksNoch keine Bewertungen
- 600-RN-0012-Windows WBF 4 5 124 10 ValidityFMADokument4 Seiten600-RN-0012-Windows WBF 4 5 124 10 ValidityFMApamekeNoch keine Bewertungen
- UCCNC UsersmanualDokument76 SeitenUCCNC UsersmanualAnonymous 4aChpF1hZNoch keine Bewertungen
- App-V Recipe For Office 2010 RTM Deployment Kit v3Dokument10 SeitenApp-V Recipe For Office 2010 RTM Deployment Kit v3Hemanth RamNoch keine Bewertungen
- Viewer 5.11 - IML Viewer Software Quick Installation GuideDokument9 SeitenViewer 5.11 - IML Viewer Software Quick Installation GuideJacksonNoch keine Bewertungen
- UCCNC Software Installation GuideDokument82 SeitenUCCNC Software Installation GuideManuel RamírezNoch keine Bewertungen
- UCCNC UsersmanualDokument80 SeitenUCCNC UsersmanualcristinaNoch keine Bewertungen
- WatchPower User Manual-20160301Dokument47 SeitenWatchPower User Manual-20160301NOELGREGORIONoch keine Bewertungen
- Foxit PDF Editor Quick Guide11.0Dokument39 SeitenFoxit PDF Editor Quick Guide11.0HLHTN CLANoch keine Bewertungen
- Driver Firmware Instructions Manual EN - Web - 02 - MODokument26 SeitenDriver Firmware Instructions Manual EN - Web - 02 - MOMarcello AssunçãoNoch keine Bewertungen
- Caefatigue Vibration (CFV) : Installation and Operations GuideDokument40 SeitenCaefatigue Vibration (CFV) : Installation and Operations GuideOliver RailaNoch keine Bewertungen
- Bladerf Windows Install Guide: Installing Bladerf Software With Matlab Simulink SupportDokument23 SeitenBladerf Windows Install Guide: Installing Bladerf Software With Matlab Simulink SupportMike Marine100% (1)
- Pharos Control V1 UserGuide CPE210Dokument77 SeitenPharos Control V1 UserGuide CPE210ssa_joeNoch keine Bewertungen
- Help SIMARIS Project 3.1 enDokument61 SeitenHelp SIMARIS Project 3.1 enVictor VignolaNoch keine Bewertungen
- User Manual: Melag FTP ServerDokument16 SeitenUser Manual: Melag FTP ServerМаксим ШульгаNoch keine Bewertungen
- Bosch-ip-camera-configuration (2)Dokument192 SeitenBosch-ip-camera-configuration (2)Alexander Rodríguez BenavidesNoch keine Bewertungen
- Product Name(s) : Model Number(s) :: HP Laserjet Managed E50045 Series Firmware ReadmeDokument25 SeitenProduct Name(s) : Model Number(s) :: HP Laserjet Managed E50045 Series Firmware Readmeyassine gharssaliNoch keine Bewertungen
- 3101832-EN R008 FX-CU V4.41 and FX Panel Firmware V4.41 Release NotesDokument16 Seiten3101832-EN R008 FX-CU V4.41 and FX Panel Firmware V4.41 Release NotesmotaNoch keine Bewertungen
- Foxit PhantomPDF - Quick GuideDokument38 SeitenFoxit PhantomPDF - Quick Guidetotoymola8Noch keine Bewertungen
- Update Firmware and Parameter Set Released en USDokument14 SeitenUpdate Firmware and Parameter Set Released en USDanilo SilvaNoch keine Bewertungen
- Soft Manag InstalDokument8 SeitenSoft Manag InstalFernando ArdallaNoch keine Bewertungen
- Sinamics s120 Function ManualDokument560 SeitenSinamics s120 Function ManualIgnacio Pizarro MezaNoch keine Bewertungen
- CNC Usb ControllerDokument210 SeitenCNC Usb ControllerDarween RezaNoch keine Bewertungen
- Wa1684 Websphere Portal V6.1 Administration and DeploymentDokument35 SeitenWa1684 Websphere Portal V6.1 Administration and DeploymentdharmareddyrNoch keine Bewertungen
- UFT Install GuideDokument56 SeitenUFT Install GuideChinmay KumarNoch keine Bewertungen
- Pipenet InstallationDokument11 SeitenPipenet InstallationMani Kumar0% (1)
- Canalyzer: Installation & Quick Start GuideDokument84 SeitenCanalyzer: Installation & Quick Start GuideNitish Chiniwar100% (2)
- Morehouse Calibration Software Instruction Manual PM 4114Dokument29 SeitenMorehouse Calibration Software Instruction Manual PM 4114Jesse GarciaNoch keine Bewertungen
- WatchPower User ManualDokument47 SeitenWatchPower User Manualtongai100% (1)
- Manual Label Printer Windows Driver English V5.09Dokument35 SeitenManual Label Printer Windows Driver English V5.09Stephan SalmenNoch keine Bewertungen
- Service Software Instructions: Nokia Customer Care 2125/2125i/2126/2126i/2128i (RH-71) Mobile TerminalsDokument10 SeitenService Software Instructions: Nokia Customer Care 2125/2125i/2126/2126i/2128i (RH-71) Mobile TerminalsanjirponselNoch keine Bewertungen
- 1MA180 2e FSH4RemoteDokument16 Seiten1MA180 2e FSH4RemoteXcxcvc VvhghtNoch keine Bewertungen
- Software Release Note R5.5 ReleaseDokument3 SeitenSoftware Release Note R5.5 Releasetisak.kandijaNoch keine Bewertungen
- DPF Manager: User ManualDokument29 SeitenDPF Manager: User ManualCelas ChilliesNoch keine Bewertungen
- EasyPLC User Manual PDFDokument100 SeitenEasyPLC User Manual PDFMiguel A V FuscoNoch keine Bewertungen
- PDF Install Guide ShareScan Comprehensive CanonDokument45 SeitenPDF Install Guide ShareScan Comprehensive CanonmjquimpoNoch keine Bewertungen
- HP 3par Inform Operating System 3.1.1 Upgrade Pre-Planning GuideDokument22 SeitenHP 3par Inform Operating System 3.1.1 Upgrade Pre-Planning Guidenicknamedugo100% (1)
- M5200/M5300/M5400 SFRA Software: Marketing Release NoticeDokument7 SeitenM5200/M5300/M5400 SFRA Software: Marketing Release NoticeAshok PatelNoch keine Bewertungen
- UFT Install GuideDokument57 SeitenUFT Install GuideRavi RanjanNoch keine Bewertungen
- CNC Usb ControllerDokument138 SeitenCNC Usb ControllerNéstor Vargas100% (1)
- SolarPower User Manual For Hybrid 3-Phsase Inverter PDFDokument49 SeitenSolarPower User Manual For Hybrid 3-Phsase Inverter PDFALBEIRO DIAZ LAMBRAÑONoch keine Bewertungen
- Fleetco Manual EnglishDokument35 SeitenFleetco Manual EnglishMpho Daniel PuleNoch keine Bewertungen
- IPendant Customization Guideline Software EngineeringDokument119 SeitenIPendant Customization Guideline Software Engineeringerwin_teichmannNoch keine Bewertungen
- Suite 14-0 Quick Upgrade GuideDokument24 SeitenSuite 14-0 Quick Upgrade GuideAli AbdelnebiNoch keine Bewertungen
- 5010 Serial MonitorDokument17 Seiten5010 Serial Monitormohamed abdelzaherNoch keine Bewertungen
- Documentación FoxyPreviewerDokument57 SeitenDocumentación FoxyPreviewermijhailjmdNoch keine Bewertungen
- TrafficViewer Pro Software Manual - Aug 23, 2013Dokument60 SeitenTrafficViewer Pro Software Manual - Aug 23, 2013Miguel CudjoeNoch keine Bewertungen
- WorkCentre 6400 Internal Release Notes R14-09Dokument2 SeitenWorkCentre 6400 Internal Release Notes R14-09Isaac Velasco :DNoch keine Bewertungen
- UFT Install GuideDokument51 SeitenUFT Install GuideSqa HoNoch keine Bewertungen
- Patch Management For Red Hat Enterprise Linux User's Guide: IBM Endpoint ManagerDokument44 SeitenPatch Management For Red Hat Enterprise Linux User's Guide: IBM Endpoint Manageragarco1Noch keine Bewertungen
- Certifiable Software Applications 3: Downward CycleVon EverandCertifiable Software Applications 3: Downward CycleNoch keine Bewertungen
- Inside Officescan 11 Service Pack 1 Upgrade DocumentationVon EverandInside Officescan 11 Service Pack 1 Upgrade DocumentationNoch keine Bewertungen
- of BLDCDokument45 Seitenof BLDCsmhbNoch keine Bewertungen
- The Evolution of TurboMachinery DesignDokument46 SeitenThe Evolution of TurboMachinery DesignsmhbNoch keine Bewertungen
- Industrial Power Corruptor User Manual 1.00 RevDokument59 SeitenIndustrial Power Corruptor User Manual 1.00 RevsmhbNoch keine Bewertungen
- 02 12 16 146784Dokument11 Seiten02 12 16 146784Alejandro GilNoch keine Bewertungen
- Turbomachinery Design Tools For Teaching Design Concepts For Axial Flow Fans - Compressors and TurbinesDokument16 SeitenTurbomachinery Design Tools For Teaching Design Concepts For Axial Flow Fans - Compressors and TurbinessmhbNoch keine Bewertungen
- Motor CalculationsDokument8 SeitenMotor CalculationssmhbNoch keine Bewertungen
- MotorDokument45 SeitenMotorsmhbNoch keine Bewertungen
- DC Motor ControlDokument29 SeitenDC Motor ControlsmhbNoch keine Bewertungen
- Synchronous Machine Parameter Estimation Using Orthogonal Series ExpansionDokument14 SeitenSynchronous Machine Parameter Estimation Using Orthogonal Series ExpansionsmhbNoch keine Bewertungen
- Brushless DC MotorsDokument14 SeitenBrushless DC MotorsNeroGetsu100% (1)
- BLDC & Weapon SystemsDokument8 SeitenBLDC & Weapon SystemssmhbNoch keine Bewertungen
- CFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignDokument259 SeitenCFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignsmhbNoch keine Bewertungen
- Motor DriveDokument40 SeitenMotor DrivevinaybabaNoch keine Bewertungen
- Servo Motor Equations - Time ConstantsDokument7 SeitenServo Motor Equations - Time ConstantssmhbNoch keine Bewertungen
- Lecture For Complex VariablesDokument83 SeitenLecture For Complex VariablessmhbNoch keine Bewertungen
- The Evolution of TurboMachinery DesignDokument46 SeitenThe Evolution of TurboMachinery DesignsmhbNoch keine Bewertungen
- 3 V 3 For PenetrationDokument1 Seite3 V 3 For PenetrationsmhbNoch keine Bewertungen
- CFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignDokument259 SeitenCFD Simulation of Complex Flows in Turbomachinery and Robust Optimization of Blade DesignsmhbNoch keine Bewertungen
- F.C. Porto-Offensive and Defensive TransitionDokument4 SeitenF.C. Porto-Offensive and Defensive TransitionsmhbNoch keine Bewertungen
- Uef T Sept 2007 FullDokument65 SeitenUef T Sept 2007 FullsmhbNoch keine Bewertungen
- In and Out #2: Emphasis: Dribbling at Speed, Passing. Set-UpDokument1 SeiteIn and Out #2: Emphasis: Dribbling at Speed, Passing. Set-UpsmhbNoch keine Bewertungen
- In and Out #3: Emphasis: Dribbling at Speed, Change of Direction, Timing of Runs, Passing. Set-UpDokument1 SeiteIn and Out #3: Emphasis: Dribbling at Speed, Change of Direction, Timing of Runs, Passing. Set-UpsmhbNoch keine Bewertungen
- In and Out #1: Emphasis: Dribbling at Speed, Change of Direction, Passing. Set-UpDokument1 SeiteIn and Out #1: Emphasis: Dribbling at Speed, Change of Direction, Passing. Set-UpsmhbNoch keine Bewertungen
- Bordeaux, France-Functional TrainingDokument3 SeitenBordeaux, France-Functional TrainingsmhbNoch keine Bewertungen
- Total Soccer FitnessDokument163 SeitenTotal Soccer FitnesssmhbNoch keine Bewertungen
- English Premier League Academy-Attacking MovementsDokument2 SeitenEnglish Premier League Academy-Attacking MovementssmhbNoch keine Bewertungen
- VVV-Venlo Under 17's-Passing and PossessionDokument2 SeitenVVV-Venlo Under 17's-Passing and PossessionSorin ColceagNoch keine Bewertungen
- EPL Academy Tour Journal PDFDokument52 SeitenEPL Academy Tour Journal PDFsmhbNoch keine Bewertungen
- Sheff United Academy PDFDokument30 SeitenSheff United Academy PDFduncfearnhead100% (1)
- EPL Academy Tour06 PDFDokument37 SeitenEPL Academy Tour06 PDFsmhbNoch keine Bewertungen
- Meaghan Smith: Bachelor of Science Business Analytics and Information TechnologyDokument1 SeiteMeaghan Smith: Bachelor of Science Business Analytics and Information TechnologyMeaghan SmithNoch keine Bewertungen
- Power9 Performance Best Practices 0Dokument2 SeitenPower9 Performance Best Practices 0rajans1999Noch keine Bewertungen
- Revit Loading InstructionsDokument2 SeitenRevit Loading Instructionsjorge cruzNoch keine Bewertungen
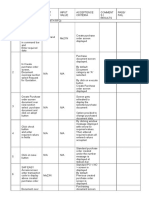
- Purchase Order - Test ScriptDokument14 SeitenPurchase Order - Test ScriptRAMAKRISHNA.GNoch keine Bewertungen
- Handbook: Your Linux SkillsDokument100 SeitenHandbook: Your Linux SkillsChrome TeeNoch keine Bewertungen
- INT402 Quiz (Unit 1 To 6)Dokument143 SeitenINT402 Quiz (Unit 1 To 6)Hancy NixonNoch keine Bewertungen
- bin/rm: Argument List Too Long (Find's Delete Flag!)Dokument3 Seitenbin/rm: Argument List Too Long (Find's Delete Flag!)stevetherrienBNoch keine Bewertungen
- CEREC 4.0 SW Operators ManualDokument72 SeitenCEREC 4.0 SW Operators Manualrickm36Noch keine Bewertungen
- Module IV Data Visualization Using Python v2.6Dokument21 SeitenModule IV Data Visualization Using Python v2.6KEESHANoch keine Bewertungen
- TIME TABLE MANAGEMENT SYSTEM A Mini Proj PDFDokument7 SeitenTIME TABLE MANAGEMENT SYSTEM A Mini Proj PDFSaranya Sa RaNoch keine Bewertungen
- Nuxeo Manual InstalarDokument6 SeitenNuxeo Manual InstalarGustavo MoreraNoch keine Bewertungen
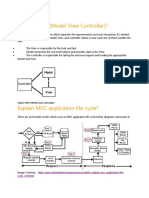
- MVC ShivprasadDokument44 SeitenMVC ShivprasadANoch keine Bewertungen
- Aman Agarwal ResumeDokument1 SeiteAman Agarwal ResumeAman AgarwalNoch keine Bewertungen
- Nikhil Sontakke PGConf India PGLogical Postgres-BDR PDFDokument22 SeitenNikhil Sontakke PGConf India PGLogical Postgres-BDR PDFANDALOUSNoch keine Bewertungen
- Rico Ajax EngineDokument10 SeitenRico Ajax EngineJulian MusicayamigosNoch keine Bewertungen
- CP2102 EkDokument8 SeitenCP2102 EkGeo BabuNoch keine Bewertungen
- OpenText Automatic Document Numbering 16.3.7 - Installation and Administration Guide English (LLESADN160307-IGD-EN-1)Dokument74 SeitenOpenText Automatic Document Numbering 16.3.7 - Installation and Administration Guide English (LLESADN160307-IGD-EN-1)MarcNoch keine Bewertungen
- Google Drive: Quick Reference GuideDokument3 SeitenGoogle Drive: Quick Reference GuideNabiila PutriNoch keine Bewertungen
- SAP How-To Guide - Extend The Search Result List For MDG For Business PartnerDokument14 SeitenSAP How-To Guide - Extend The Search Result List For MDG For Business Partnersap mmNoch keine Bewertungen
- Learn Computer Basics PartsDokument4 SeitenLearn Computer Basics PartsKim VenturaNoch keine Bewertungen
- A Detailed Lesson Plan in CSS 10Dokument8 SeitenA Detailed Lesson Plan in CSS 10ANTONIO A. SANTOSNoch keine Bewertungen
- Install & Enable OpenSSH On CentOS 7Dokument7 SeitenInstall & Enable OpenSSH On CentOS 7Ahmed chelsieNoch keine Bewertungen
- Dev Tools GuideDokument91 SeitenDev Tools GuidescriNoch keine Bewertungen
- ComicRack Manual (2nd Ed)Dokument124 SeitenComicRack Manual (2nd Ed)600WPMPONoch keine Bewertungen
- JENA-ARQ TutorialDokument49 SeitenJENA-ARQ Tutorialapi-19981384100% (2)
- Cheatsheet: Apache Server (HTTPD) Monitoring: More InfoDokument2 SeitenCheatsheet: Apache Server (HTTPD) Monitoring: More InfoDolores AntonioNoch keine Bewertungen
- Change LogzxxxxxxxxxxxxxxxDokument8 SeitenChange LogzxxxxxxxxxxxxxxxLatheesh V M VillaNoch keine Bewertungen
- 10DFDDokument1 Seite10DFDapi-26570979Noch keine Bewertungen
- Libero HRDokument48 SeitenLibero HRedayNoch keine Bewertungen