Das könnte Ihnen auch gefallen
- Campo EléctricoDokument3 SeitenCampo Eléctricoorlandini2000Noch keine Bewertungen
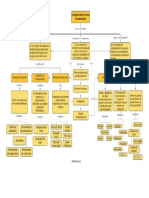
- Mapa Conceptual de HardwareDokument1 SeiteMapa Conceptual de Hardwareorlandini2000Noch keine Bewertungen
- Fisica Cantidad de MovimientoDokument1 SeiteFisica Cantidad de Movimientoorlandini2000Noch keine Bewertungen
- Ejercicios WriterDokument13 SeitenEjercicios Writerorlandini2000Noch keine Bewertungen
- Encontrar Objetos PerdidosDokument1 SeiteEncontrar Objetos Perdidosorlandini2000Noch keine Bewertungen
- Cuáles Son Los 50 Descubrimientos Más Importantes de La HistoriaDokument6 SeitenCuáles Son Los 50 Descubrimientos Más Importantes de La HistoriaPierreNoch keine Bewertungen
- Cartilla EbsaDokument60 SeitenCartilla EbsaOmar CorreaNoch keine Bewertungen
- Fisica Cantidad de MovimientoDokument1 SeiteFisica Cantidad de Movimientoorlandini2000Noch keine Bewertungen
- Taller de Repaso QuimicaDokument2 SeitenTaller de Repaso Quimicaorlandini2000Noch keine Bewertungen
- Los 50 Inventos Más ImportantesDokument3 SeitenLos 50 Inventos Más Importantesorlandini2000Noch keine Bewertungen
- Final Proyecto Lombricultivo UltimoDokument48 SeitenFinal Proyecto Lombricultivo Ultimoorlandini2000Noch keine Bewertungen
- Ejercicios McuDokument2 SeitenEjercicios Mcuorlandini2000Noch keine Bewertungen
- Normalizacion Metrologia Dibujo Tecnico Octavo Mayo 25Dokument1 SeiteNormalizacion Metrologia Dibujo Tecnico Octavo Mayo 25orlandini2000Noch keine Bewertungen
- Los 50 Inventos Más ImportantesDokument3 SeitenLos 50 Inventos Más Importantesorlandini2000Noch keine Bewertungen
- Inventos 6o Mayo 27 No FuiDokument1 SeiteInventos 6o Mayo 27 No Fuiorlandini2000Noch keine Bewertungen
- Leyes de Newton Fisica Decimo Mayo 24Dokument2 SeitenLeyes de Newton Fisica Decimo Mayo 24orlandini2000Noch keine Bewertungen
- Construccion Grado 7 Mayo 27 NFDokument1 SeiteConstruccion Grado 7 Mayo 27 NForlandini2000Noch keine Bewertungen
- Centrales Energia Noveno Mayo 25Dokument1 SeiteCentrales Energia Noveno Mayo 25orlandini2000Noch keine Bewertungen
- Ardunino Bloques Decimo Mayo 26Dokument2 SeitenArdunino Bloques Decimo Mayo 26orlandini2000Noch keine Bewertungen
- El Movimiento RectilíneoDokument2 SeitenEl Movimiento Rectilíneoorlandini2000Noch keine Bewertungen
- Octu BreDokument1 SeiteOctu Breorlandini2000Noch keine Bewertungen
- AbrilDokument1 SeiteAbrilorlandini2000Noch keine Bewertungen
- Calc Hoja de Calculo Marzo 9 OctavoDokument2 SeitenCalc Hoja de Calculo Marzo 9 Octavoorlandini2000Noch keine Bewertungen
- DiciembreDokument1 SeiteDiciembreorlandini2000Noch keine Bewertungen
- NoviembreDokument1 SeiteNoviembreorlandini2000Noch keine Bewertungen
- Decreto No 093 de 01mar2022Dokument8 SeitenDecreto No 093 de 01mar2022orlandini2000Noch keine Bewertungen
- AgostoDokument1 SeiteAgostoorlandini2000Noch keine Bewertungen
- SeptiembreDokument1 SeiteSeptiembreorlandini2000Noch keine Bewertungen
- Guia de LABORATORIO Ondas v3Dokument4 SeitenGuia de LABORATORIO Ondas v3Heyser coronel chinchayNoch keine Bewertungen
- Ejercicios ExcelDokument14 SeitenEjercicios ExcelRoberto Flores Chipana0% (1)
- Formulario - de - Registro - de - Materias - 2019 IST LOJADokument2 SeitenFormulario - de - Registro - de - Materias - 2019 IST LOJARony CalderonNoch keine Bewertungen
- OTOcam Guía Del UsuarioDokument20 SeitenOTOcam Guía Del UsuarioJuanito Zúñiga GarcíaNoch keine Bewertungen
- Pedro Frez Control Semana 2Dokument8 SeitenPedro Frez Control Semana 2Pedro Frez TorresNoch keine Bewertungen
- Modelos E ComerceDokument30 SeitenModelos E ComerceManFerSFNoch keine Bewertungen
- Balance de MateriaDokument16 SeitenBalance de Materiaraihrashebworld barahonaNoch keine Bewertungen
- Manual de Dungeons 2Dokument40 SeitenManual de Dungeons 2Brahian GarciaNoch keine Bewertungen
- Clase # 2 Electronica Digital Apicada AIEP 2019Dokument49 SeitenClase # 2 Electronica Digital Apicada AIEP 2019Christian Aros BobadillaNoch keine Bewertungen
- 13 Guia - de - Aprendizaje - AA4 PDFDokument11 Seiten13 Guia - de - Aprendizaje - AA4 PDFCarlos Esteban Alfaro DiazNoch keine Bewertungen
- PortabilidadDokument1 SeitePortabilidadgustavoNoch keine Bewertungen
- MovimientosDokument6 SeitenMovimientosDavid ParedesNoch keine Bewertungen
- Estudio Definitivo Puente El Tingo y AccesosDokument148 SeitenEstudio Definitivo Puente El Tingo y AccesosAnni LipaNoch keine Bewertungen
- Instalar Impresoras Automaticamente Desde Logon - VbsDokument2 SeitenInstalar Impresoras Automaticamente Desde Logon - VbsOrlando VerdugoNoch keine Bewertungen
- S1 - Tarea 1 Trabajo Individual de La SemanaDokument7 SeitenS1 - Tarea 1 Trabajo Individual de La SemanaCindy RoblesNoch keine Bewertungen
- Actividad 5 - Modulo 5Dokument2 SeitenActividad 5 - Modulo 5karen tocaria80% (5)
- Curso Electrónica Digital: Compuertas LógicasDokument23 SeitenCurso Electrónica Digital: Compuertas LógicasjemalizNoch keine Bewertungen
- Robótica: cuerpo y alma avanzanDokument6 SeitenRobótica: cuerpo y alma avanzanJOSE ALEXANDER REVOLLO MITANoch keine Bewertungen
- 02 Algebra 4ºDokument22 Seiten02 Algebra 4ºRaul Alcantara SanchezNoch keine Bewertungen
- Ciberdelitos en España: Impunidad del 95Dokument45 SeitenCiberdelitos en España: Impunidad del 95SIN PELOS EN LA LENGUA SisisissisNoch keine Bewertungen
- Informe #020-2021 - Comunico Inicio de ActividadDokument1 SeiteInforme #020-2021 - Comunico Inicio de ActividadAngel Cardenas YauriNoch keine Bewertungen
- PresasDokument14 SeitenPresasbetoaranoNoch keine Bewertungen
- Diferencias entre gráficos vectoriales y mapas de bitsDokument2 SeitenDiferencias entre gráficos vectoriales y mapas de bitsFabian RodriguezNoch keine Bewertungen
- Planificacion de Obras CivilesDokument4 SeitenPlanificacion de Obras CivilesCelestino Puma HuañecNoch keine Bewertungen
- Práctica #4 - Hidrocarburos AromáticosDokument13 SeitenPráctica #4 - Hidrocarburos AromáticossoledadNoch keine Bewertungen
- Configurar Servidor RAS o RIP Con DebianDokument9 SeitenConfigurar Servidor RAS o RIP Con DebianCarlos GarciaNoch keine Bewertungen
- Nº Acción Formativa: Crear Componentes Software Con Tecnologías de Desarrollo Orientadas A ObjetosDokument3 SeitenNº Acción Formativa: Crear Componentes Software Con Tecnologías de Desarrollo Orientadas A Objetoslantigua218716Noch keine Bewertungen
- Objetivos de William Hidalgo Septiembre 2017Dokument3 SeitenObjetivos de William Hidalgo Septiembre 2017William HidalgoNoch keine Bewertungen
- CurpDokument1 SeiteCurpNavi ZeiNoch keine Bewertungen
- Caso de Estudio Calidad de DatosDokument2 SeitenCaso de Estudio Calidad de DatosJonh SnowNoch keine Bewertungen
- Niveles y FlujosDokument25 SeitenNiveles y FlujosCEDRYNoch keine Bewertungen
- Manual ingreso expediente expulsiónDokument9 SeitenManual ingreso expediente expulsiónSecretaria AlterraNoch keine Bewertungen