INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET)
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
ISSN 0976 6464(Print) ISSN 0976 6472(Online) Volume 4, Issue 2, March April, 2013, pp. 217-224 IAEME: www.iaeme.com/ijecet.asp Journal Impact Factor (2013): 5.8896 (Calculated by GISI) www.jifactor.com
IJECET
IAEME
ARM7 MICROCONTROLLER BASED FUZZY LOGIC CONTROLLER FOR LIQUID LEVEL CONTROL SYSTEM
L. Shrimanth Sudheer, Immanuel J., P. Bhaskar, and Parvathi C. S. Department of Instrumentation Technology, Gulbarga University Post Graduate Centre, RAICHUR 584133, Karnataka, INDIA,
ABSTRACT Design and construction of a microcontroller based liquid level control system is presented in this paper. ARM7 (Philips LPC2129) microcontroller based system for the real time liquid level control is developed using the fuzzy logic controller (FLC). This controller has been applied to the water-in-tank level control of a continuous process. The controller is implemented in embedded C language to control the liquid level to the desired value. The performance of the proposed controller is compared with conventional PID controller. An accuracy of .1% is achieved in the control of liquid level over the range of 0 to 100cm. It is observed that the proposed scheme controls the tank level effectively not only in the steady state but also in the transient state. Keywords: ARM7, FLC, Liquid Level, Microcontroller. 1. INTRODUCTION
The nonlinear systems are frequently encountered in the process industries. Level of liquid being an important process parameter has to be maintained at the desired level for smooth running of the process and for better quality products. There have been many papers reported on the subject of controlling and monitoring liquid level in different industrial processes. M. Wang and F. Crusca [1] designed and implemented a gain scheduling controller for water level control in a tank. It was observed that the system achieved a better performance over the conventional controllers like P, PI, and PID. W. Zhang et al [2] proposed a new two-degree-of-freedom level control scheme for processes with dead time T. Heckenthaler and S. Engell [3] developed level controller for a nonlinear two-tank system based on fuzzy control. Similarly, application of fuzzy logic for water level control of small217
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
scale hydro-generating units was reported by T. Niimura and R. Yokoyama [4]. The recent work by W. Chatrattanawuth et al [5] reported a level control system using a fuzzy I-PD controller. Their simulation results shown that fuzzy I-PD controller performed better over conventional controller. C. Li and J. Lian [6] reported the application of genetic algorithm in PID parameter optimization for level control system. They simulated the proposed strategy on MATLAB and later tested using LabVIEW. Another LabVIEW based water level control is also reported by L. Gao and J. Lin [7]. The DCS based water level control of boiler drum is reported by Y. Qiliang et al [8]. A similar work is also reported by H-M Chen et al [9]. They designed a sliding mode controller for a water tank liquid level control system. Few authors reported various schemes and their implementation on different platforms such as PC/uP/DSP. Some of the reports were also based on simulation. But an attempt is made here to implement a fuzzy logic control algorithm on a microcontroller for real time level control of a water-in-tank system. This approach will reduce the cost and space of the system. We will address this issue by employing an advanced ARM7TDMI (PHILIPS LPC2129) processor. 2. DESIGN OF FUZZY LOGIC CONTROLLER
As the name itself suggests, a fuzzy logic controller incorporates fuzzy logic for decision making or rather to produce control action as required by the plant or process [10]. FLCs are knowledge based controllers consisting of linguistic IF-THEN rules that can be constructed using the knowledge of experts in the given field of interest. A two input and one output fuzzy logic controller is designed as shown in the Fig. 1. The error (e) and change-in-error (ce) are the two inputs, and control action (ca) is the corresponding output of the FLC. A triangular membership function with seven members (linguistic variables) termed as negative large (NL), negative medium (NM), negative small (NS), zero error (ZE), positive small (PS), positive medium (PM), and positive large (PL) are used to map the crisp input to universe of discourse (-1 to +1). The universe of discourse is the range over which the fuzzy variables are defined. The control rules are constructed to achieve the best performance of the FLC. With seven members, we obtain 49 rules. Mamdani inference engine is used [11]. The e input to the controller is obtained by subtracting measured value/process variable (y) from the reference (r), and the ce is difference between present and previous errors. The output of the controller i.e., change in control action (ca) is applied to the process. The r, which is also the desired value, is entered by the operator in the beginning. This is a closed loop control where the process variable is continuously monitored to maintain the error to zero.
z-1 + ce
Rule Base Inference Engine
Fig 1: Fuzzy logic control system
218
Defuzzifier
Fuzzifier
r + -
e=r-y
FLC
ca
Process/ Plant
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
3.
ARM7 MICROCONTROLLER BASED LEVEL CONTROL SYSTEM
The block diagram of proposed fuzzy logic controller scheme for liquid level control system is illustrated in Fig. 2. A cylindrical tank of 100cmX20cmX20cm dimension is considered. Level of the liquid (water) contained in a tank is measured and controlled at the desired value. The level is measured in terms of pressure developed in the capillary attached to the tank at the bottom. As the liquid level in tank increases the pressure developed inside the capillary also increases. Hence, the pressure, directly proportional to the liquid level, is sensed and converted into equivalent voltage by the integrated circuit differential pressure transducer (DPT) placed on the top of the tank. The microcontroller measures the liquid level through this sensor, signal conditioner, and on-chip analog to digital converter (ADC) and displays it on LCD in terms of cm. The inlet flow of water from a pump (motor) to the tank is controlled by a pneumatic control valve (PCV) which in turn controlled by the microcontroller through on-chip PWM unit, PWM to voltage converter, V/I converter, and current to pressure converter (IPC). The PWM technique is employed to precisely move the pneumatic valve.
ARM7 Microcontroller Desired Value Fuzzy +Logic Controller Measured Value e PWM Unit Output Signal Conditioner PCV Pump A/D Converter Input Signal Conditioner Process Tank Controlled Value
Reservoir
DPT
Fig 2: Block diagram of microcontroller based FLC for liquid level control system
4.
HARDWARE DETAILS
The actual hardware used to study the proposed control system is discussed here. The hardware consists of process-tank, reservoir tank, pump, level sensor, pneumatic actuator, compressor, input and output signal conditioning circuits, ARM7 microcontroller, and LCD. The photograph of complete hardware is shown in Fig. 3. 4.1 ARM7 Microcontroller
The LPC2129 from Philips Semiconductor [12] consists of an ARM7TDMI-S CPU with real-time emulation and 256KB of embedded high speed flash memory available in compact 64 pin package. The ARM7TDMI-S is a general purpose 32-bit microprocessor, which offers high performance and low power consumption. Its architecture is based on RISC principle. It includes; 16KB on-chip SRAM, 256KB Flash, 4-channel 10-bit ADC, 32-bit timers with PWM units and RTC, 46 GPIO ports, I2C bus interface, and on-chip crystal oscillator. This microcontroller is best suited for designing single-chip instruments.
219
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
Level Sensor Process Tank
Regulator IPC PCV
Reservoir
Pump
Fig 3: Photograph of level process 4.2 Level Sensor The level sensor SX05DN from SenSym [13] is used. It is basically an integrated circuit differential pressure transducer (DPT) consists of four strain gauges connected in Wheatstone bridge and are pasted on a diaphragm. The bridge is excited with a stable +5V DC. The sensor is provided with two input ports for applying either single ended or differential pressure. In this application, one port is closed, and another is connected to the bottom of the tank for single ended measurement. The input change in pressure, exerted on the diaphragm, is converted into corresponding change in resistance which is further converted to change in voltage. 4.3
Excitation Source In order to convert the change in resistance of the sensor to the corresponding change in voltage, a precise and constant excitation voltage of +5V is generated using LM329, LM308, and 2N2222 as shown in Fig. 4. LM329, a precision voltage source, produces 6.9V which is dropped down to +5V and connected to non-inverting terminal of op-amp LM308. An op-amp with npn-transistor 2N2222 at the output provides the enough current to the bridge. With a +5V excitation voltage, the sensor will produce an output of 1.5mV/cm. An offset-nullify circuit, using a potentiometer, is connected to bridge output to nullify the offset and make zero adjust in initial condition. Instrumentation Amplifier Sensor produces a small differential output voltage of 1.5mV/cm liquid height. So an instrumentation amplifier, AD620 [14] from Analog Devices, is used to pick, amplify, and convert it to single ended voltage compatible to be sampled by the on-chip ADC of LPC2129 microcontroller. A gain of 10 is set for the instrumentation amplifier to get 15mV/cm which is more than the resolution of ADC. 4.4
220
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
Analog to Digital Converter The output of instrumentation amplifier is acquired by on-chip ADC and converted into 10-bit binary word under program control. The resolution of ADC is 2.5mV at Vref =2.56V and conversion time is 2.44 Sec. LCD LCD provides better readability, reduced power consumption, and backlight during low light vision. A 16x2 line LCD [15] is used to display the measured level. It is interfaced to the microcontroller in nibble-mode with upper 4-bits (D3-D7) on the LCD to transfer the data with MSB first and LSB next mode. The data lines, D3 to D7, are connected to P0.4 to P0.7, and control lines RS (register select), and E (enable) are connected to P0.2 and P0.10 ports of microcontroller respectively as shown in Fig. 4. 4.6
4.5
Fig 4: Circuit schematic of the complete system 5. SOFTWARE DETAILS
The complete algorithm for data acquisition, measurement, display, and control of liquid level is developed in embedded C under KEILs integrated development environment (Vision 4.0). The flowchart of the complete routine is shown in Fig. 5. All the variables of controller and on-chip peripherals are initialized in the beginning. A serial program is also developed to transfer the data to PC through UART1 for further analysis of the data.
221
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
Start Call ADC and LCD subroutine to display current level in cm Declare & Initialize LCD, ADC, PWM, & FLC subroutines, local variables &
Find the error and substitute it in FLC algorithm
Initialize hardware (LCD, on-chip ADC, PWM, and
Scale FLC output & load in PWM register to generate control
Send valve-open & motor-on commands and display the initial level on LCD
Update FLC variables
Read set point level and display it on LCD
Store and send the control action to PC through UART1
Fig 5: Flowchart of level control system 6. RESULTS
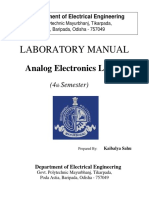
The real time implementation of FLC for liquid level control is tested for standard step input of 15 cm. A step input from initial value of 0 cm is applied to the controller. The performance of FLC is compared with the conventional PID controller for the same step of 15 cm. The plots in Fig. 6 show step input response of FLC and PIDC. It is evident from the plot that FLC performs superior over PIDC in terms of sharp rise time, and quick settling time. The comparison of both the controllers is made and the corresponding performance indices are tabulated in Table 1.
15
12
FL PID
Level in Cm
1 0 50 100 150 Time in Sec 200 250 300
Fig 6: Step input response for 15
222
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
Table 1: Performance comparison of controllers for a step of 15 cm Performance Indices Controller Type PIDC FLC tr (Sec) 65.37 59.55 ts (Sec) 108.4 101.91 ess (cm) 0.2 0 MP (cm) 0 0
7.
CONCLUSION
In this paper we have successfully designed and implemented a fuzzy logic controller on ARM7 microcontroller for a real-time liquid level control. The real time experimental results show that the proposed control scheme provides better transient as well as steady state response. More remarkably, the error response seems to be excellent in contrast to most available linear PID controller. Besides, the incorporation of ARM7 microcontroller made the system very compact and low cost. REFERENCES [1] M. Wang and F. Crusca, Design and implementation of a gain scheduling controller for a water level control system, ISA Transactions, vol.41, no.3, pp.323-331 2002. [2] W. Zhang, X. Xu, and Y. Xi, A new two-degree-of-freedom level control scheme, ISA Transactions, vol.41, no.3, pp.333-342, 2002. [3] T. Heckenthaler and S. Engell, Approximately time-optimal fuzzy control of a two-tank system, IEEE Control Systems, pp. 24-30, 1994. [4] T. Niimura and R. Yokoyama, Water level control of small-scale hydro-generating units by fuzzy logic, IEEE, pp. 2483-2487, 1995. [5] W. Chatrattanawuth et al, Fuzzy I-PD controller for level control, SICE-ICASE International Joint Conference 2006, Bexco, Busan, Korea, pp. 5649-5652, 2006. [6] C. Li and J. Lian, The application of immune genetic algorithm in PID parameter optimization for level control system, Proc. of the IEEE Int. Conf. On Automation and Logistics, Jinan, China, pp. 782-786, 2007. [7] L. Gao and J. Lin, LabVIEW and internet based remote water level control laboratory, IEEE, pp. 187-188, 2007. [8] Y. Qiliang et al, Water level control of boiler drum using one IEC61131-3 based DCS, Proc. of the 26th Chinese Control Conference, Zhangjiajie, Hunan, China, pp-252-255, 2007. [9] H-M Chen et al, Design of a sliding mode controller for a water tank liquid level control system, IEEE, pp. 234-240, 2007. [10] John Yen, Reza Langari, Fuzzy Logic: Intelligence, Control and Information, Prentice Hall, Englewood Cliffs, NJ, 1999. [11] R. M. Manjunath and S. Janaki Raman, Fuzzy adaptive PID for flow control system based on OPC, IJCA Special Issue on Computational Science New Dimensions & Perspectives NCCSE, 2011, pp. 5-8. [12] Philips LPC2129 user manual, 2004 at http://www.semiconductors.philips.com [13] SenSym SX05DN -ICPT Datasheet at http://www.sensortechnics.com 223
International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 6464(Print), ISSN 0976 6472(Online) Volume 4, Issue 2, March April (2013), IAEME
[14] Analog Devices AD620 Datasheet at http://www.analog.com [15] Oriole LCD Module User Guide [16] Jadhav Sumedh Damodhar and Phatale Aruna Prashant, Microcontroller Based Photovoltaic Battery Charging System With Buck Converter International Journal of Electrical Engineering & Technology (IJEET), Volume 3, Issue 1, 2012, pp. 123 - 130, ISSN Print: 0976-6545, ISSN Online: 0976 0976-6553. [17] VenkataRamesh.Edara, B.Amarendra Reddy, Srikanth Monangi and M.Vimala, Analytical Structures for Fuzzy PID Controllers and Applications, International Journal of Electrical Engineering & Technology (IJEET), Volume 1, Issue 1, 2010, pp. 1 - 17, ISSN Print: 0976-6545, ISSN Online: 0976 0976-6553. [18] T.Balamurugan, Dr.S.Manoharan , P.Sheeba and M.Savithri, Design a Photovolatic Array with Boost Converter Using Fuzzy Logic Controller, International Journal of Electrical Engineering & Technology (IJEET), Volume 3, Issue 2, 2012, pp. 444 - 456, ISSN Print: 0976-6545, ISSN Online: 0976 0976-6553.
224
Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Determinants Affecting The User's Intention To Use Mobile Banking ApplicationsDokument8 SeitenDeterminants Affecting The User's Intention To Use Mobile Banking ApplicationsIAEME PublicationNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Broad Unexposed Skills of Transgender EntrepreneursDokument8 SeitenBroad Unexposed Skills of Transgender EntrepreneursIAEME PublicationNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Voice Based Atm For Visually Impaired Using ArduinoDokument7 SeitenVoice Based Atm For Visually Impaired Using ArduinoIAEME PublicationNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Modeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyDokument14 SeitenModeling and Analysis of Surface Roughness and White Later Thickness in Wire-Electric Discharge Turning Process Through Response Surface MethodologyIAEME PublicationNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Impact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesDokument10 SeitenImpact of Emotional Intelligence On Human Resource Management Practices Among The Remote Working It EmployeesIAEME PublicationNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Analyse The User Predilection On Gpay and Phonepe For Digital TransactionsDokument7 SeitenAnalyse The User Predilection On Gpay and Phonepe For Digital TransactionsIAEME PublicationNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Study On The Reasons For Transgender To Become EntrepreneursDokument7 SeitenA Study On The Reasons For Transgender To Become EntrepreneursIAEME PublicationNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Visualising Aging Parents & Their Close Carers Life Journey in Aging EconomyDokument4 SeitenVisualising Aging Parents & Their Close Carers Life Journey in Aging EconomyIAEME PublicationNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Influence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiDokument16 SeitenInfluence of Talent Management Practices On Organizational Performance A Study With Reference To It Sector in ChennaiIAEME PublicationNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Attrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesDokument15 SeitenAttrition in The It Industry During Covid-19 Pandemic: Linking Emotional Intelligence and Talent Management ProcessesIAEME PublicationNoch keine Bewertungen
- Gandhi On Non-Violent PoliceDokument8 SeitenGandhi On Non-Violent PoliceIAEME PublicationNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaDokument9 SeitenA Study of Various Types of Loans of Selected Public and Private Sector Banks With Reference To Npa in State HaryanaIAEME PublicationNoch keine Bewertungen
- A Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurDokument7 SeitenA Study On The Impact of Organizational Culture On The Effectiveness of Performance Management Systems in Healthcare Organizations at ThanjavurIAEME PublicationNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Role of Social Entrepreneurship in Rural Development of India - Problems and ChallengesDokument18 SeitenRole of Social Entrepreneurship in Rural Development of India - Problems and ChallengesIAEME PublicationNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- A Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksDokument10 SeitenA Proficient Minimum-Routine Reliable Recovery Line Accumulation Scheme For Non-Deterministic Mobile Distributed FrameworksIAEME PublicationNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- A Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiDokument16 SeitenA Study On Talent Management and Its Impact On Employee Retention in Selected It Organizations in ChennaiIAEME PublicationNoch keine Bewertungen
- A Multiple - Channel Queuing Models On Fuzzy EnvironmentDokument13 SeitenA Multiple - Channel Queuing Models On Fuzzy EnvironmentIAEME PublicationNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Various Fuzzy Numbers and Their Various Ranking ApproachesDokument10 SeitenVarious Fuzzy Numbers and Their Various Ranking ApproachesIAEME PublicationNoch keine Bewertungen
- Knowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentDokument8 SeitenKnowledge Self-Efficacy and Research Collaboration Towards Knowledge Sharing: The Moderating Effect of Employee CommitmentIAEME PublicationNoch keine Bewertungen
- EXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESDokument9 SeitenEXPERIMENTAL STUDY OF MECHANICAL AND TRIBOLOGICAL RELATION OF NYLON/BaSO4 POLYMER COMPOSITESIAEME PublicationNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Application of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDDokument19 SeitenApplication of Frugal Approach For Productivity Improvement - A Case Study of Mahindra and Mahindra LTDIAEME PublicationNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Dealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsDokument8 SeitenDealing With Recurrent Terminates in Orchestrated Reliable Recovery Line Accumulation Algorithms For Faulttolerant Mobile Distributed SystemsIAEME PublicationNoch keine Bewertungen
- Optimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsDokument13 SeitenOptimal Reconfiguration of Power Distribution Radial Network Using Hybrid Meta-Heuristic AlgorithmsIAEME PublicationNoch keine Bewertungen
- Analysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsDokument13 SeitenAnalysis of Fuzzy Inference System Based Interline Power Flow Controller For Power System With Wind Energy Conversion System During Faulted ConditionsIAEME PublicationNoch keine Bewertungen
- Quality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceDokument7 SeitenQuality of Work-Life On Employee Retention and Job Satisfaction: The Moderating Role of Job PerformanceIAEME PublicationNoch keine Bewertungen
- A Review of Particle Swarm Optimization (Pso) AlgorithmDokument26 SeitenA Review of Particle Swarm Optimization (Pso) AlgorithmIAEME PublicationNoch keine Bewertungen
- Moderating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorDokument7 SeitenModerating Effect of Job Satisfaction On Turnover Intention and Stress Burnout Among Employees in The Information Technology SectorIAEME PublicationNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Financial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelDokument9 SeitenFinancial Literacy On Investment Performance: The Mediating Effect of Big-Five Personality Traits ModelIAEME PublicationNoch keine Bewertungen
- Prediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsDokument13 SeitenPrediction of Average Total Project Duration Using Artificial Neural Networks, Fuzzy Logic, and Regression ModelsIAEME PublicationNoch keine Bewertungen
- Analysis On Machine Cell Recognition and Detaching From Neural SystemsDokument9 SeitenAnalysis On Machine Cell Recognition and Detaching From Neural SystemsIAEME PublicationNoch keine Bewertungen
- Measurements and Instrumentation (ELE 3202)Dokument4 SeitenMeasurements and Instrumentation (ELE 3202)JithinNoch keine Bewertungen
- LISA III PORTABLE HEADPHONE AMPLIFIRE Operating ManualDokument18 SeitenLISA III PORTABLE HEADPHONE AMPLIFIRE Operating Manualapi-3701386Noch keine Bewertungen
- Design and Simulation of LNA Using Advanced Design Systems (ADS)Dokument6 SeitenDesign and Simulation of LNA Using Advanced Design Systems (ADS)GRD JournalsNoch keine Bewertungen
- Vibration: Type Level SwitchDokument8 SeitenVibration: Type Level SwitchHoàngViệtAnhNoch keine Bewertungen
- 4.222 Regarding Revised Syllabus For T.Y.B.sc - Physics Sem V VI A.Y. 2017 18Dokument20 Seiten4.222 Regarding Revised Syllabus For T.Y.B.sc - Physics Sem V VI A.Y. 2017 18AKSHAJ RANENoch keine Bewertungen
- Ibwave TutorialDokument3 SeitenIbwave TutorialArielNoch keine Bewertungen
- Suhr Riot Distortion User ManualDokument7 SeitenSuhr Riot Distortion User ManualFrancisco Carvalho100% (1)
- Power Electronics ProposalDokument4 SeitenPower Electronics ProposalTaimour ShamiNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- EE428 Industrial Process Control: Slides With Red Background Are Not Included in The SyllabusDokument54 SeitenEE428 Industrial Process Control: Slides With Red Background Are Not Included in The SyllabusUmer ImranNoch keine Bewertungen
- SD7 OperatingInstructions Amplifire e PDFDokument115 SeitenSD7 OperatingInstructions Amplifire e PDFkrishnaNoch keine Bewertungen
- Manual Ece 1201 OkDokument64 SeitenManual Ece 1201 OkAbraham AlemNoch keine Bewertungen
- M7 Single Quadrupole GC-MS - BrochureDokument6 SeitenM7 Single Quadrupole GC-MS - BrochureRafaelGerardoAgueroZamoraNoch keine Bewertungen
- Microlog Setup For Motor Current AnalysisDokument4 SeitenMicrolog Setup For Motor Current AnalysishaziqNoch keine Bewertungen
- Analog Electronics Lab Manual 4th SemDokument53 SeitenAnalog Electronics Lab Manual 4th SemErDeepak123Noch keine Bewertungen
- SubsystemDokument13 SeitenSubsystemShojol AhamedNoch keine Bewertungen
- Insulation ClassDokument2 SeitenInsulation ClassGanesh.MahendraNoch keine Bewertungen
- Esd5111 enDokument4 SeitenEsd5111 enMahdi Dehghankar100% (1)
- Planar4 System CatalogDokument194 SeitenPlanar4 System CatalogMohamed OmarNoch keine Bewertungen
- Eet - Student Text PDFDokument135 SeitenEet - Student Text PDFvinodNoch keine Bewertungen
- New Microsoft Office Word DocumentDokument21 SeitenNew Microsoft Office Word DocumentPankaj AttriNoch keine Bewertungen
- Data SheetDokument11 SeitenData SheetelgarinenseNoch keine Bewertungen
- WharfedaleeDokument4 SeitenWharfedaleeapi-276000758Noch keine Bewertungen
- Low Cost, Miniature Isolation Amplifiers AD202/AD204: High AccuracyDokument12 SeitenLow Cost, Miniature Isolation Amplifiers AD202/AD204: High AccuracyDiego I. HernándezNoch keine Bewertungen
- Explore Kef - c15, c25, c35, c45, c55, c65, c75, c85, c95, c200sw - Kef InternationalDokument5 SeitenExplore Kef - c15, c25, c35, c45, c55, c65, c75, c85, c95, c200sw - Kef InternationalLaur GoeNoch keine Bewertungen
- GM-800 Reference Manual EnglishDokument22 SeitenGM-800 Reference Manual EnglishMike usoNoch keine Bewertungen
- EAC of ALDDokument18 SeitenEAC of ALDAbhilash GhadeiNoch keine Bewertungen
- Slv-E580 630 727 730 735 780Dokument79 SeitenSlv-E580 630 727 730 735 780Paulo BishomeNoch keine Bewertungen
- ZTX 60Dokument3 SeitenZTX 60zeeshanshaNoch keine Bewertungen
- vc8b vc8w en Om A0Dokument2 Seitenvc8b vc8w en Om A0bobeloNoch keine Bewertungen
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchVon EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchBewertung: 4 von 5 Sternen4/5 (10)
- Certified Solidworks Professional Advanced Weldments Exam PreparationVon EverandCertified Solidworks Professional Advanced Weldments Exam PreparationBewertung: 5 von 5 Sternen5/5 (1)