Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Voltage - V - Salna-T-662-16-Order - and - Reasons OCR PDFDokument58 SeitenVoltage - V - Salna-T-662-16-Order - and - Reasons OCR PDFHoward KnopfNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
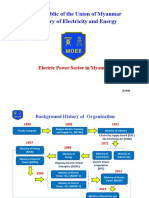
- Myanmar Power SystemDokument4 SeitenMyanmar Power Systemkayden.keitonNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Topic 5 FB Stability PDFDokument26 SeitenTopic 5 FB Stability PDFAbdulrahman NasserNoch keine Bewertungen
- Guidelines For Performance Task - LIVING MUSEUM PDFDokument2 SeitenGuidelines For Performance Task - LIVING MUSEUM PDFJoserie Barioga HernaneNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- ITS Quick Ref GuideDokument6 SeitenITS Quick Ref GuidedhanahbalNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- HydroAir™ Variable Radius Turbine - Dresser-RandDokument2 SeitenHydroAir™ Variable Radius Turbine - Dresser-RandLeoPérezNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- 9500MPR - MEF8 Circuit Emulation ServicesDokument5 Seiten9500MPR - MEF8 Circuit Emulation ServicesedderjpNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Sports Collection CatalogueDokument31 SeitenSports Collection CataloguesitarazmiNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Miser'S T/R Loop Antenna: MiserlyDokument3 SeitenThe Miser'S T/R Loop Antenna: MiserlyTariq ZuhlufNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Android VersionsDokument7 SeitenAndroid VersionsEdna Mae Salas GarciaNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- V1 001 PDFDokument20 SeitenV1 001 PDFG100% (2)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- CMR900Dokument6 SeitenCMR900Time To Use BrainNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Xcortech XT301 Compact Airsoft Tracer Unit Manual: Setup ProcessDokument3 SeitenXcortech XT301 Compact Airsoft Tracer Unit Manual: Setup ProcessrobertoNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- ExcavationDokument18 SeitenExcavationBogdan-Gabriel SchiopuNoch keine Bewertungen
- Euro Guard BrochureDokument28 SeitenEuro Guard BrochureNazia SodawalaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- E85005-0126 - FireShield Plus Conventional Fire Alarm Systems PDFDokument8 SeitenE85005-0126 - FireShield Plus Conventional Fire Alarm Systems PDFLuis TovarNoch keine Bewertungen
- Family Surveyed 2017 - TimberDokument26 SeitenFamily Surveyed 2017 - TimberAlibasher Macalnas0% (1)
- 8) Pengolahan Data DIESEL 1 Katup Gas Konstan-DikonversiDokument47 Seiten8) Pengolahan Data DIESEL 1 Katup Gas Konstan-DikonversiIndra Arvito ArmanNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Abbbaileyinfi 90Dokument17 SeitenAbbbaileyinfi 90Vipper80Noch keine Bewertungen
- Nueva Ecija University of Science and Technology Gapan Academic Extension CampusDokument4 SeitenNueva Ecija University of Science and Technology Gapan Academic Extension CampusErmercadoNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Quotation For Blue Star Printek From Boway2010 (1) .09.04Dokument1 SeiteQuotation For Blue Star Printek From Boway2010 (1) .09.04Arvin Kumar GargNoch keine Bewertungen
- Telenor Organization Structure and CultureDokument29 SeitenTelenor Organization Structure and CultureAli Farooqui85% (20)
- Pre - FabricationDokument23 SeitenPre - FabricationMahaveer Singh100% (1)
- Oracle Secure BackupDokument294 SeitenOracle Secure BackupCarlos ValderramaNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- A-VIP Compressor BrochureDokument6 SeitenA-VIP Compressor BrochureHans Hans SadzNoch keine Bewertungen
- Synopsis (Alumni Association)Dokument17 SeitenSynopsis (Alumni Association)vishygNoch keine Bewertungen
- Report On Siddartha Bank LimitedDokument24 SeitenReport On Siddartha Bank LimitedSanim AmatyaNoch keine Bewertungen
- Ao-90265ba Pci CardDokument46 SeitenAo-90265ba Pci CardFrancisco Javier PérezNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Last - kmsg-2016-11-17 10 29 34Dokument588 SeitenLast - kmsg-2016-11-17 10 29 34Anonymous HpW3UcqNoch keine Bewertungen
- Brochure A35g A40g t4f en 22 20050840 DDokument20 SeitenBrochure A35g A40g t4f en 22 20050840 DRengga PratamaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)