Das könnte Ihnen auch gefallen
- Gmail Check List FinalDokument2 SeitenGmail Check List FinalJeyanthi GanesanNoch keine Bewertungen
- Power Quality Improvement of Grid Interconnected 3-Phase 4-Wire Distribution System Using Fuzzy Logic ControlDokument5 SeitenPower Quality Improvement of Grid Interconnected 3-Phase 4-Wire Distribution System Using Fuzzy Logic ControlJeyanthi GanesanNoch keine Bewertungen
- Check List TemplateweDokument3 SeitenCheck List TemplateweghilteaNoch keine Bewertungen
- GUI Testing ChecklistDokument16 SeitenGUI Testing ChecklistJeyanthi GanesanNoch keine Bewertungen
- Modern Power Electronics and AC Drives by Bimal KDokument738 SeitenModern Power Electronics and AC Drives by Bimal Kapi-3715281100% (4)
- DC Choppers: Prof. T.K. Anantha Kumar, E&E Dept., MSRITDokument84 SeitenDC Choppers: Prof. T.K. Anantha Kumar, E&E Dept., MSRITJeyanthi GanesanNoch keine Bewertungen
- Design, Simulation and Hardware Implementation ofDokument8 SeitenDesign, Simulation and Hardware Implementation ofInternational Journal of Research in Engineering and TechnologyNoch keine Bewertungen
- High Step Up Ratio DC DC Converters Part - IIDokument50 SeitenHigh Step Up Ratio DC DC Converters Part - IIAhmed58seribegawanNoch keine Bewertungen
- Control Systems Engineering - Nagrath I.J. and Gopal M.Dokument81 SeitenControl Systems Engineering - Nagrath I.J. and Gopal M.Amber Agrawal22% (9)
- 9133handy FormulaeforQuantitativeAptitudeProblemsDokument12 Seiten9133handy FormulaeforQuantitativeAptitudeProblemsJeyanthi GanesanNoch keine Bewertungen
- Eee V Modern Control Theory (10ee55) NotesDokument135 SeitenEee V Modern Control Theory (10ee55) NotesJeyanthi Ganesan100% (1)
- Shunmugam Ias Study Circle: Coimbatore, TirupurDokument2 SeitenShunmugam Ias Study Circle: Coimbatore, TirupurJeyanthi GanesanNoch keine Bewertungen
- General Studies Paper I: Maximum Marks: Number of Questions: Total Time: SyllabusDokument1 SeiteGeneral Studies Paper I: Maximum Marks: Number of Questions: Total Time: SyllabusJeyanthi GanesanNoch keine Bewertungen
- Power Semiconductor Device NptelDokument14 SeitenPower Semiconductor Device NptelMohammad Aminul IslamNoch keine Bewertungen
- IJERTV1IS5321Dokument9 SeitenIJERTV1IS5321Jeyanthi GanesanNoch keine Bewertungen
- Grid Interfacing InverterDokument8 SeitenGrid Interfacing InverterJeyanthi GanesanNoch keine Bewertungen
- InTech-Modeling Simulation of Hysteresis Current Controlled Inverters Using MatlabDokument27 SeitenInTech-Modeling Simulation of Hysteresis Current Controlled Inverters Using MatlabJeyanthi GanesanNoch keine Bewertungen
- Halvarsson Chalmers 2012 FinalDokument12 SeitenHalvarsson Chalmers 2012 FinalJeyanthi GanesanNoch keine Bewertungen
- Suliana Simulation Study Using SIMULINKMATLAB On THD For PV Grid Connected SystemDokument5 SeitenSuliana Simulation Study Using SIMULINKMATLAB On THD For PV Grid Connected SystemJeyanthi GanesanNoch keine Bewertungen
- Photoshop TutorialDokument8 SeitenPhotoshop Tutorialajay_hazraNoch keine Bewertungen
- Erts Chapter PPT by Vahid.Dokument39 SeitenErts Chapter PPT by Vahid.Boppudi Sasi BinduNoch keine Bewertungen
- CareersValley Jobs Help 2Dokument60 SeitenCareersValley Jobs Help 2Shyam GodboleNoch keine Bewertungen
- ch2 040802Dokument29 Seitench2 040802Praveen KarthigairajanNoch keine Bewertungen
- EC2304Dokument39 SeitenEC2304Ragu PathiNoch keine Bewertungen
- Multimedia Streaming Technology in 4G Mobile Communication SystemsDokument6 SeitenMultimedia Streaming Technology in 4G Mobile Communication SystemssasikanthkoppisettiNoch keine Bewertungen
- VHDL Modeling and Design FlowDokument455 SeitenVHDL Modeling and Design FlowPrabakaran RajendranNoch keine Bewertungen
- Innovative EEE Mini - Projects ListDokument8 SeitenInnovative EEE Mini - Projects Listkssohal1986Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Topik 6 - ConverterDokument20 SeitenTopik 6 - ConverterKartini M. Yusof NanaNoch keine Bewertungen
- Eee-305 Temperature BoxDokument33 SeitenEee-305 Temperature BoxKasshaf AhmadNoch keine Bewertungen
- Design A Logamp RF Pulse DetectorDokument5 SeitenDesign A Logamp RF Pulse DetectorEric SorensenNoch keine Bewertungen
- DSP Ese497Dokument90 SeitenDSP Ese497Nikhil Kumar SawNoch keine Bewertungen
- Embedded ControllerDokument516 SeitenEmbedded ControllerRamesh ReddyNoch keine Bewertungen
- CIE A2 Physics Paper 4 Notes V2Dokument26 SeitenCIE A2 Physics Paper 4 Notes V2saad100% (1)
- Dynamo-Powered LED Light Circuits For BicyclesDokument22 SeitenDynamo-Powered LED Light Circuits For BicyclesDharani KumarNoch keine Bewertungen
- SE ETc and Electronics Engg. 2019 Patt - 30.062020Dokument67 SeitenSE ETc and Electronics Engg. 2019 Patt - 30.062020skc_eceNoch keine Bewertungen
- Schmitt TriggerDokument11 SeitenSchmitt TriggerSwapnali JadhavNoch keine Bewertungen
- A Data SheetDokument36 SeitenA Data SheetThiago AlmeiNoch keine Bewertungen
- Vehicle Accident Detection and Prevention Using IoT and Deep LearningDokument6 SeitenVehicle Accident Detection and Prevention Using IoT and Deep LearningRENJITH GOPANNoch keine Bewertungen
- Reverse Engineering The Ipod Shuffle 3G Headphone Remote ProtocolDokument16 SeitenReverse Engineering The Ipod Shuffle 3G Headphone Remote ProtocolJohn ZhangNoch keine Bewertungen
- Course of Digital Techniques Lectures2 017 - PDF - 1Dokument51 SeitenCourse of Digital Techniques Lectures2 017 - PDF - 1juber mullaNoch keine Bewertungen
- Design of A Low Volage Low Power and High Speed CMOS ComparatorDokument26 SeitenDesign of A Low Volage Low Power and High Speed CMOS Comparatorsai projectNoch keine Bewertungen
- Polarised Mho RelayDokument11 SeitenPolarised Mho RelayPavan Gowda100% (2)
- SCHEME - E Fourth Semester - ED, EI, EJ, EN, ET, EXDokument40 SeitenSCHEME - E Fourth Semester - ED, EI, EJ, EN, ET, EXMrunal Tambe0% (1)
- Linear Circuits Lab (2) - Electronic Circuits Lab: SpecificationsDokument4 SeitenLinear Circuits Lab (2) - Electronic Circuits Lab: SpecificationsAlwi PutraNoch keine Bewertungen
- A Universal Adaptive Driving Scheme For Synchronous Rectification in LLC Resonant ConvertersDokument7 SeitenA Universal Adaptive Driving Scheme For Synchronous Rectification in LLC Resonant ConverterspowerpuffgalsxgNoch keine Bewertungen
- Description Features: High Accuracy, Dual Winding PSR AC-DC LED DriverDokument8 SeitenDescription Features: High Accuracy, Dual Winding PSR AC-DC LED Driverjohnbad36Noch keine Bewertungen
- Direct PWM Drive Brushless Pre-Driver For Household Appliance MotorsDokument17 SeitenDirect PWM Drive Brushless Pre-Driver For Household Appliance MotorsnguoidiquaNoch keine Bewertungen
- PS4 FonteDokument53 SeitenPS4 FonteEdson HenriqueNoch keine Bewertungen
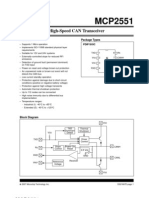
- MCP 2551Dokument24 SeitenMCP 2551senguttuvelNoch keine Bewertungen
- Extech 380562Dokument4 SeitenExtech 380562Ieremeiov VladimirNoch keine Bewertungen
- C339GDokument13 SeitenC339GHeriberto Flores AmpieNoch keine Bewertungen
- Dspic33epxxxgm3xx 6xx 7xx DatasheetDokument542 SeitenDspic33epxxxgm3xx 6xx 7xx DatasheetarolnNoch keine Bewertungen
- Uc 3845Dokument23 SeitenUc 3845Bahram RN100% (1)
- Lab 6 - Lock-In AmplifierDokument5 SeitenLab 6 - Lock-In Amplifierripon15Noch keine Bewertungen
- Class D Tutorial 2Dokument17 SeitenClass D Tutorial 2អំភ្លី សំលេង100% (1)
- ECE CSESyllabusDokument42 SeitenECE CSESyllabusVivekNoch keine Bewertungen