Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Surface Treatments For Precifitation-Hardening Stainless SteelsDokument62 SeitenSurface Treatments For Precifitation-Hardening Stainless SteelssleonNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- CRM Tendril Sts Pacing Lead CatalogDokument2 SeitenCRM Tendril Sts Pacing Lead CatalogsleonNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- (FFSD-10-01-X-N SHOWN) : Decimals AnglesDokument2 Seiten(FFSD-10-01-X-N SHOWN) : Decimals AnglessleonNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Models SRS-WS, SRS-WM and SRS-WN: 2 Srs12Wm QZ Uu C1 +470L P MDokument2 SeitenModels SRS-WS, SRS-WM and SRS-WN: 2 Srs12Wm QZ Uu C1 +470L P MsleonNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- P091.063.CANopen - iPOS .UMDokument210 SeitenP091.063.CANopen - iPOS .UMsleonNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Attributes Acceptance Sampling Understanding How It WorksDokument72 SeitenAttributes Acceptance Sampling Understanding How It WorksdhtrungNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- How To Download 2D and 3D CAD Data From The THK Technical Support Site (TTS)Dokument7 SeitenHow To Download 2D and 3D CAD Data From The THK Technical Support Site (TTS)sleonNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Spectralon Diffuse Reflectance TargetsDokument3 SeitenSpectralon Diffuse Reflectance TargetssleonNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Vero Material Data SheetDokument3 SeitenVero Material Data SheetsleonNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Attributes Acceptance Sampling Understanding How It WorksDokument72 SeitenAttributes Acceptance Sampling Understanding How It WorksdhtrungNoch keine Bewertungen
- Bending Stress of BeamsDokument18 SeitenBending Stress of BeamsRambabu RNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- GL Huyett EngineeringHandbookDokument95 SeitenGL Huyett EngineeringHandbookSwetha PattelaNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Guia de Desinfecção CDC (EUA)Dokument163 SeitenGuia de Desinfecção CDC (EUA)Adriano BuenoNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Mil A 8625FDokument20 SeitenMil A 8625FarturofastNoch keine Bewertungen
- Contact Sensor: KeywordsDokument8 SeitenContact Sensor: KeywordssleonNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Fundamental Optics Optical Coatings PDFDokument112 SeitenFundamental Optics Optical Coatings PDFsleonNoch keine Bewertungen
- Plastic Injection Molding Tolerance GuideDokument2 SeitenPlastic Injection Molding Tolerance GuideRavindra ErabattiNoch keine Bewertungen
- 9984 Tis Nov2013Dokument2 Seiten9984 Tis Nov2013sleonNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Solenoids Principle of OperationDokument12 SeitenSolenoids Principle of OperationSorin RobertNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Acetal Vs DelrinDokument1 SeiteAcetal Vs DelrinsleonNoch keine Bewertungen
- Example 4: Cylindrical Four-Point BendingDokument3 SeitenExample 4: Cylindrical Four-Point Bendingirfanhilmanisme93Noch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Attributes Acceptance Sampling Understanding How It WorksDokument72 SeitenAttributes Acceptance Sampling Understanding How It WorksdhtrungNoch keine Bewertungen
- Documento5 82Dokument0 SeitenDocumento5 82okr15Noch keine Bewertungen
- Structural DesignDokument34 SeitenStructural Designdave4359Noch keine Bewertungen
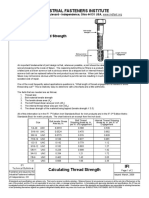
- Calculating Thread StrengthDokument2 SeitenCalculating Thread StrengthMauricio Riquelme0% (1)
- Engineering Fundamentals ThreadFasteners RalphShoberg SR1Dokument39 SeitenEngineering Fundamentals ThreadFasteners RalphShoberg SR1Juan RiveraNoch keine Bewertungen
- c544 Phosphor BronzeDokument2 Seitenc544 Phosphor BronzesleonNoch keine Bewertungen
- Atlas of Fatigue CurvesDokument534 SeitenAtlas of Fatigue CurvesДимитрина Киндова-Петрова92% (26)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Article - Screw Threads DesignDokument7 SeitenArticle - Screw Threads DesignjdfdfererNoch keine Bewertungen
- Camisas Refrigeracion Flowsleeves Pi-058 GB 2013-06-12Dokument38 SeitenCamisas Refrigeracion Flowsleeves Pi-058 GB 2013-06-12daniel2rialNoch keine Bewertungen
- Underground Construction TechnologyDokument74 SeitenUnderground Construction TechnologyChin Thau WuiNoch keine Bewertungen
- Commercial CO Refrigeration Systems: Guide For Subcritical and Transcritical CO ApplicationsDokument44 SeitenCommercial CO Refrigeration Systems: Guide For Subcritical and Transcritical CO ApplicationsChrise5502Noch keine Bewertungen
- Abdul Hamid CompiledDokument276 SeitenAbdul Hamid CompiledRanvir RajNoch keine Bewertungen
- 2.sensors & ActuatorsDokument30 Seiten2.sensors & Actuatorszakariyae el mourabit100% (1)
- Spare Parts Manual: Solidc PumpDokument12 SeitenSpare Parts Manual: Solidc PumpDaniel FernándezNoch keine Bewertungen
- 1-Relative Velocity in Special Relativity: Page898 CollegeDokument26 Seiten1-Relative Velocity in Special Relativity: Page898 CollegeAbdulrhman fNoch keine Bewertungen
- Anti Icing System Unikl Miat SlideDokument69 SeitenAnti Icing System Unikl Miat Slidemellon3duwenNoch keine Bewertungen
- AV Maintenance Manual - R1Dokument15 SeitenAV Maintenance Manual - R1Faiz MiserangNoch keine Bewertungen
- Surface Tension PDFDokument7 SeitenSurface Tension PDFNsBhasinNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Automated Drilling MachineDokument14 SeitenAutomated Drilling MachineVardhan ChipperNoch keine Bewertungen
- 004 VSL Datasheets US-ADokument22 Seiten004 VSL Datasheets US-Akmabd100% (1)
- Filter ElementsDokument8 SeitenFilter ElementsKing LongNoch keine Bewertungen
- 8-Baf - DP 3045 MT 234 Motor 1,2kw AtexDokument5 Seiten8-Baf - DP 3045 MT 234 Motor 1,2kw AtexSantiago RodaNoch keine Bewertungen
- Driver Manual Scania New - 1011 - en-GB PDFDokument905 SeitenDriver Manual Scania New - 1011 - en-GB PDFfajardiniant100% (7)
- CaracterizacióndeSalpicadurasSMAW Molleda 2007Dokument5 SeitenCaracterizacióndeSalpicadurasSMAW Molleda 2007Tamara Maria Ortiz MendezNoch keine Bewertungen
- 2016 FC-W Registered Four-Stroke-Cycle Marine OilsDokument2 Seiten2016 FC-W Registered Four-Stroke-Cycle Marine Oilschaca18Noch keine Bewertungen
- En 5 4 306 24011Dokument13 SeitenEn 5 4 306 24011Edvandro Dennis Iturri ArteagaNoch keine Bewertungen
- 7-6325-E (DL310-7) PDFDokument4 Seiten7-6325-E (DL310-7) PDFMax RojasNoch keine Bewertungen
- Supracell Circular Daf: Dissolved Air Flotation ClarifierDokument2 SeitenSupracell Circular Daf: Dissolved Air Flotation ClarifierKevin KeaneNoch keine Bewertungen
- Murray Roberts (Willy Cocquyt PR Eng 860106) Calculation Sheet Input SheetDokument23 SeitenMurray Roberts (Willy Cocquyt PR Eng 860106) Calculation Sheet Input SheetMbalekelwa MpembeNoch keine Bewertungen
- ATA 29-Hydraulic System: SCHOOL YEAR 2023-2024Dokument22 SeitenATA 29-Hydraulic System: SCHOOL YEAR 2023-2024Ruskee PatawaranNoch keine Bewertungen
- D8R PartsDokument570 SeitenD8R PartsMohamed BakheetNoch keine Bewertungen
- Gelbart Course Notes Part 1Dokument24 SeitenGelbart Course Notes Part 1Maciek K.Noch keine Bewertungen
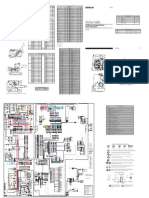
- 315B Forest Swing Machine Electrical System: 7RZ284-UPDokument2 Seiten315B Forest Swing Machine Electrical System: 7RZ284-UPGilvan JuniorNoch keine Bewertungen
- Navigating The New Aisc: Steel Construction ManualDokument31 SeitenNavigating The New Aisc: Steel Construction ManualAdhi ErlanggaNoch keine Bewertungen
- WWW - Manaresults.Co - In: B.Tech Ii Year I Semester (R13) Supplementary Examinations June 2016Dokument2 SeitenWWW - Manaresults.Co - In: B.Tech Ii Year I Semester (R13) Supplementary Examinations June 2016Noor IslamNoch keine Bewertungen
- Diagnostic Trouble Code (DTC) Charts and DescriptionsDokument176 SeitenDiagnostic Trouble Code (DTC) Charts and DescriptionsfredNoch keine Bewertungen
- Case Study On Design and Development of A Metal Matrix Composite For Aeronautical ApplicationsDokument13 SeitenCase Study On Design and Development of A Metal Matrix Composite For Aeronautical ApplicationsAruna MNoch keine Bewertungen
- Use of Basic Tools Tve 7 ModuleDokument13 SeitenUse of Basic Tools Tve 7 ModuleJocelyn C. DinampoNoch keine Bewertungen
- A Brief History of Time: From the Big Bang to Black HolesVon EverandA Brief History of Time: From the Big Bang to Black HolesBewertung: 4 von 5 Sternen4/5 (2193)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseVon EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseBewertung: 3.5 von 5 Sternen3.5/5 (69)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceVon EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceBewertung: 4 von 5 Sternen4/5 (51)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessVon EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessBewertung: 4 von 5 Sternen4/5 (6)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldVon EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldBewertung: 3.5 von 5 Sternen3.5/5 (64)
- Summary and Interpretation of Reality TransurfingVon EverandSummary and Interpretation of Reality TransurfingBewertung: 5 von 5 Sternen5/5 (5)