
Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Experiments in Principles of Electronic Devices and Circuits (PDFDrive)Dokument321 SeitenExperiments in Principles of Electronic Devices and Circuits (PDFDrive)Ralph Jason Alvarez100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Design of Analog CMOS Integrated Circuits (Behzad Razavi) MarcadoDokument706 SeitenDesign of Analog CMOS Integrated Circuits (Behzad Razavi) MarcadoAminAbed100% (4)
- UAE University Electric Circuits Chapter SummaryDokument362 SeitenUAE University Electric Circuits Chapter SummaryPattem KedarnathNoch keine Bewertungen
- Switched Mode Power SupplyDokument153 SeitenSwitched Mode Power SupplyIvan222244Noch keine Bewertungen
- 1000w Inverter PURE SINE WAVE Schematic DiagramDokument153 Seiten1000w Inverter PURE SINE WAVE Schematic Diagramjeevapillay100% (4)
- Analog IC Design With Low-Dropout RegulatorsDokument374 SeitenAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- Semiconductor Manufacturing AustriamicrosystemsDokument47 SeitenSemiconductor Manufacturing Austriamicrosystemsmikeshinoda20110% (1)
- High-Efficiency Hybrid Resonant Converter for Wide PV Input RegulationDokument76 SeitenHigh-Efficiency Hybrid Resonant Converter for Wide PV Input RegulationVINAYNoch keine Bewertungen
- Analog Circuit Design Volume Three: Design Note CollectionVon EverandAnalog Circuit Design Volume Three: Design Note CollectionBewertung: 3 von 5 Sternen3/5 (2)
- Two-Stage Micro-Grid Inverter With High PDFDokument10 SeitenTwo-Stage Micro-Grid Inverter With High PDFacostaricciNoch keine Bewertungen
- Ee - Module 3 - April 2012Dokument3 SeitenEe - Module 3 - April 2012Znevba Quintano100% (2)
- Compact Models For Future Generation CMOSDokument170 SeitenCompact Models For Future Generation CMOSmikeshinoda2011Noch keine Bewertungen
- BuckConverter Design Jpe10Dokument13 SeitenBuckConverter Design Jpe10joviflocasNoch keine Bewertungen
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNoch keine Bewertungen
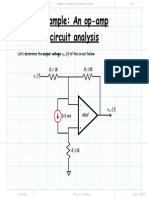
- Example An Op Amp Circuit Analysis LectureDokument23 SeitenExample An Op Amp Circuit Analysis LectureAthiyo MartinNoch keine Bewertungen
- Design and Analysis of Low Voltage Low Dropout RegulatorDokument4 SeitenDesign and Analysis of Low Voltage Low Dropout RegulatorIJSTENoch keine Bewertungen
- ThesisDokument75 SeitenThesishodeegits9526Noch keine Bewertungen
- Capacitor Less LdoDokument11 SeitenCapacitor Less LdoantharmukiNoch keine Bewertungen
- Current Source InverterDokument16 SeitenCurrent Source Inverterjp-sharma100% (1)
- Design of Cmos Low Drop-Out Regulators: A Comparative Study: Ashvani Kumar Mishra, Rishikesh PandeyDokument7 SeitenDesign of Cmos Low Drop-Out Regulators: A Comparative Study: Ashvani Kumar Mishra, Rishikesh PandeyrahmanakberNoch keine Bewertungen
- Full On-Chip CMOS Low-Dropout Voltage RegulatorDokument12 SeitenFull On-Chip CMOS Low-Dropout Voltage RegulatorashishmanyanNoch keine Bewertungen
- IET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under HighDokument10 SeitenIET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under HighTuấn Anh PhạmNoch keine Bewertungen
- Capless LDO DESIGNDokument6 SeitenCapless LDO DESIGNbhasin_hemantNoch keine Bewertungen
- A 6-UW Chip-Area-Efficient Output-Capacitorless LDO in 90-Nm CMOS TechnologyDokument10 SeitenA 6-UW Chip-Area-Efficient Output-Capacitorless LDO in 90-Nm CMOS Technology孙士祯Noch keine Bewertungen
- Capacitor Less Ldo ThesisDokument4 SeitenCapacitor Less Ldo Thesisevelyndonaldsonbridgeport100% (2)
- Self-calibrating output-capacitor-free LDO with wide range and fast responseDokument12 SeitenSelf-calibrating output-capacitor-free LDO with wide range and fast responseVani YamaniNoch keine Bewertungen
- Wide Range Soft Switching PWM Three-Level DC-DC Converters Suitable For Industrial ApplicationsDokument14 SeitenWide Range Soft Switching PWM Three-Level DC-DC Converters Suitable For Industrial Applicationsstrngr06Noch keine Bewertungen
- A Capacitor-Free CMOS Low-Dropout Regulator With Damping-Factor-Control Frequency CompensationDokument12 SeitenA Capacitor-Free CMOS Low-Dropout Regulator With Damping-Factor-Control Frequency Compensationtotoya38Noch keine Bewertungen
- Capacitorless LDO Voltage RegulatorsDokument14 SeitenCapacitorless LDO Voltage Regulatorsd_nikuNoch keine Bewertungen
- LDO Voltage Regulator by Sanjay Singh NIT KKRDokument9 SeitenLDO Voltage Regulator by Sanjay Singh NIT KKRSanjay SinghNoch keine Bewertungen
- Project ReportDokument37 SeitenProject ReportAmit SinghNoch keine Bewertungen
- Investigating Buck Converter With Hybrid LDO Mode For Improved Low-Load OperationDokument4 SeitenInvestigating Buck Converter With Hybrid LDO Mode For Improved Low-Load OperationInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- A Low-Power and High-Speed Voltage Level Shifter Based On A Regulated Cross-Coupled Pull-Up NetworkDokument5 SeitenA Low-Power and High-Speed Voltage Level Shifter Based On A Regulated Cross-Coupled Pull-Up Network15022000rskushalNoch keine Bewertungen
- ARCP Converter Enables Soft Switching Without Increased Device RatingsDokument8 SeitenARCP Converter Enables Soft Switching Without Increased Device RatingsAjit JainNoch keine Bewertungen
- Modified SEPIC Converter Literature ReviewDokument55 SeitenModified SEPIC Converter Literature ReviewHEERAVATHINoch keine Bewertungen
- Cascade Controller For DCDC Buck ConvertorDokument6 SeitenCascade Controller For DCDC Buck ConvertorCristóbal Eduardo Carreño MosqueiraNoch keine Bewertungen
- IEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeDokument4 SeitenIEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeKumar RajNoch keine Bewertungen
- (Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link CapacitanceDokument12 Seiten(Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link Capacitancesk.karimeeeNoch keine Bewertungen
- High-Efficiency Active-Clamp Forward Converter With Transient Current Build-Up (TCB) ZVS TechniqueDokument9 SeitenHigh-Efficiency Active-Clamp Forward Converter With Transient Current Build-Up (TCB) ZVS TechniquekerblaNoch keine Bewertungen
- Heavy Load Light Load Conversion ReportDokument41 SeitenHeavy Load Light Load Conversion ReportSanjivee SachinNoch keine Bewertungen
- Solid State Tap Changer PresentationDokument17 SeitenSolid State Tap Changer PresentationSujit GangurdeNoch keine Bewertungen
- Ultra-Low Quiescent Current CMOS LDO with Small Output VariationsDokument6 SeitenUltra-Low Quiescent Current CMOS LDO with Small Output VariationsMehanathan Maggie MikeyNoch keine Bewertungen
- Topic Assignment14Dokument6 SeitenTopic Assignment14cuongakamarineNoch keine Bewertungen
- Design and Optimization of On-Chip Voltage Regulators For High Performance ApplicationsDokument4 SeitenDesign and Optimization of On-Chip Voltage Regulators For High Performance ApplicationsBaluvu JagadishNoch keine Bewertungen
- IpcDokument4 SeitenIpcdbircs.wwwNoch keine Bewertungen
- A High Slew-Rate Push-Pull Output Amplifier For Low-Quiescent Current Low-Dropout Regulators With Transient-Response ImprovementDokument5 SeitenA High Slew-Rate Push-Pull Output Amplifier For Low-Quiescent Current Low-Dropout Regulators With Transient-Response ImprovementsonofalexanderNoch keine Bewertungen
- Integrated Current Balancing Transformer Based Input-Parallel Output-Parallel LLC Resonant Converter ModulesDokument8 SeitenIntegrated Current Balancing Transformer Based Input-Parallel Output-Parallel LLC Resonant Converter ModulesSh M AaqibNoch keine Bewertungen
- Single-Ended High-Efficiency Step-Up Converter Using The Isolated Switched-Capacitor CellDokument13 SeitenSingle-Ended High-Efficiency Step-Up Converter Using The Isolated Switched-Capacitor CellHarjinder SinghNoch keine Bewertungen
- SHORT CIRCUIT CURRENT LIMITATION TECHNIQUESDokument13 SeitenSHORT CIRCUIT CURRENT LIMITATION TECHNIQUESariefNoch keine Bewertungen
- A Low-Voltage, Low Quiescent Current, Low Drop-Out RegulatorDokument9 SeitenA Low-Voltage, Low Quiescent Current, Low Drop-Out RegulatorVinayNoch keine Bewertungen
- Designing PFC and PSFB Stages for EV Battery ChargersDokument5 SeitenDesigning PFC and PSFB Stages for EV Battery ChargersThien DinhNoch keine Bewertungen
- Sursa 200W, 470kHzDokument67 SeitenSursa 200W, 470kHzv_costelNoch keine Bewertungen
- High-speed voltage follower designDokument2 SeitenHigh-speed voltage follower designfatyfroisNoch keine Bewertungen
- New resonant DC link converter concept for static power conversionDokument9 SeitenNew resonant DC link converter concept for static power conversionSenthil KumarNoch keine Bewertungen
- Series Reactors in CLP NetworkDokument5 SeitenSeries Reactors in CLP NetworkAmberMeerabNoch keine Bewertungen
- An Out-Put Cap Free Adaptively Biased LDO PDFDokument13 SeitenAn Out-Put Cap Free Adaptively Biased LDO PDF孙士祯Noch keine Bewertungen
- Design Analysis of Low Drop-Out Voltage Regulator With Current Buffer CompensationDokument5 SeitenDesign Analysis of Low Drop-Out Voltage Regulator With Current Buffer Compensationkhang npNoch keine Bewertungen
- 9.eee Ijeee Two Phase Interleaved DC SumalathaDokument16 Seiten9.eee Ijeee Two Phase Interleaved DC Sumalathaiaset123Noch keine Bewertungen
- Fix3 33333333Dokument4 SeitenFix3 33333333doanminhtien030903Noch keine Bewertungen
- 2008 Yin Man Development of Single-Transistor-Control LDO PDFDokument10 Seiten2008 Yin Man Development of Single-Transistor-Control LDO PDFrahmanakberNoch keine Bewertungen
- A Fold-Back Current Limit Circuit With Load-Insensitive Quiescent Current For CMOS Low Dropout RegulatorDokument4 SeitenA Fold-Back Current Limit Circuit With Load-Insensitive Quiescent Current For CMOS Low Dropout Regulatorhjtseng1974Noch keine Bewertungen
- Analysis, Design, and Implementation of A High-Efficiency Full-Wave Rectifier in Standard CMOS TechnologyDokument11 SeitenAnalysis, Design, and Implementation of A High-Efficiency Full-Wave Rectifier in Standard CMOS TechnologymohsinmanzoorNoch keine Bewertungen
- 5 - 2015 ITRS 2.0 - More MooreDokument21 Seiten5 - 2015 ITRS 2.0 - More Mooremikeshinoda2011Noch keine Bewertungen
- 5 - 2015 ITRS 2.0 - More MooreDokument52 Seiten5 - 2015 ITRS 2.0 - More Mooremikeshinoda2011Noch keine Bewertungen
- 5 - 2015 ITRS 2.0 - More MooreDokument52 Seiten5 - 2015 ITRS 2.0 - More Mooremikeshinoda2011Noch keine Bewertungen
- MbanDokument74 SeitenMbanmikeshinoda2011Noch keine Bewertungen
- 7 - 2015 ITRS 2.0 Factory Integration PDFDokument80 Seiten7 - 2015 ITRS 2.0 Factory Integration PDFmikeshinoda2011Noch keine Bewertungen
- All-In-One Energy Harvesting and Storage DevicesDokument19 SeitenAll-In-One Energy Harvesting and Storage Devicesmikeshinoda2011Noch keine Bewertungen
- AtcpanDokument18 SeitenAtcpanmikeshinoda2011Noch keine Bewertungen
- 607 Lect 12 LDODokument58 Seiten607 Lect 12 LDOmikeshinoda2011Noch keine Bewertungen
- DvugDokument158 SeitenDvugmikeshinoda2011Noch keine Bewertungen
- ME1000 RF Circuit Design Lab 4 Filter Characterization Using Vector Network AnalyzerDokument6 SeitenME1000 RF Circuit Design Lab 4 Filter Characterization Using Vector Network Analyzermikeshinoda2011Noch keine Bewertungen
- ADC Performance Survey 1997-2015 Trends and LimitsDokument72 SeitenADC Performance Survey 1997-2015 Trends and Limitsmikeshinoda2011Noch keine Bewertungen
- High-Speed Digital Test & Measurement: Chris Allen (Callen@eecs - Ku.edu)Dokument21 SeitenHigh-Speed Digital Test & Measurement: Chris Allen (Callen@eecs - Ku.edu)mikeshinoda2011Noch keine Bewertungen
- 3D Low Frequency Wakeup Receiver: General DescriptionDokument49 Seiten3D Low Frequency Wakeup Receiver: General Descriptionmikeshinoda2011Noch keine Bewertungen
- Thesis Younis SOE PDFDokument123 SeitenThesis Younis SOE PDFmikeshinoda2011Noch keine Bewertungen
- ASEE - Thermoelectric Paper - FinalDokument12 SeitenASEE - Thermoelectric Paper - FinalmasakpNoch keine Bewertungen
- BSIM470 Manual PDFDokument184 SeitenBSIM470 Manual PDFmikeshinoda2011Noch keine Bewertungen
- Fourier 94Dokument9 SeitenFourier 94mikeshinoda2011Noch keine Bewertungen
- Ch6 7 ProblemsDokument82 SeitenCh6 7 Problemsmikeshinoda2011Noch keine Bewertungen
- AmsdmvDokument176 SeitenAmsdmvmikeshinoda2011Noch keine Bewertungen
- 1 and 2 Printings: MOS Transistor, 3d EditionDokument2 Seiten1 and 2 Printings: MOS Transistor, 3d Editionmikeshinoda2011Noch keine Bewertungen
- Voltage Regulator PDFDokument6 SeitenVoltage Regulator PDFSai KrishnaNoch keine Bewertungen
- Patent LeungDokument11 SeitenPatent Leungmikeshinoda2011Noch keine Bewertungen
- 93XX Series RTC Battery PDFDokument17 Seiten93XX Series RTC Battery PDFmikeshinoda2011Noch keine Bewertungen
- b16396 8Dokument32 Seitenb16396 8mikeshinoda2011Noch keine Bewertungen
- 120-08 Telemetry (TM) Radio Frequency (RF) HandbookDokument133 Seiten120-08 Telemetry (TM) Radio Frequency (RF) Handbookviveknarula295382Noch keine Bewertungen
- Modeling RF SystemsDokument41 SeitenModeling RF Systemsmikeshinoda2011Noch keine Bewertungen
- The Experimental Researches of Michael FaradayDokument368 SeitenThe Experimental Researches of Michael Faradaygazorninplotz100% (1)
- Sverker 760Dokument6 SeitenSverker 760Junior Ramirez ReyesNoch keine Bewertungen
- ProtectionDokument53 SeitenProtectionsantoshkumar100% (1)
- EE809: Analog Integrated Circuit Design: Week-4 4 - 8 Oct 2021Dokument24 SeitenEE809: Analog Integrated Circuit Design: Week-4 4 - 8 Oct 2021Muhammad FaizanNoch keine Bewertungen
- Back-to-Back Accelerometer CalibrationDokument3 SeitenBack-to-Back Accelerometer CalibrationAekDzLaiNoch keine Bewertungen
- Description Features: Ait Semiconductor IncDokument10 SeitenDescription Features: Ait Semiconductor IncMaktum KamatNoch keine Bewertungen
- AN10009 Differential Terminations Rev1.2Dokument18 SeitenAN10009 Differential Terminations Rev1.2eppramod3271Noch keine Bewertungen
- Electrical CircuitsDokument89 SeitenElectrical CircuitsManyam KummariNoch keine Bewertungen
- Network Theorems: Publishing As Pearson (Imprint) BoylestadDokument117 SeitenNetwork Theorems: Publishing As Pearson (Imprint) BoylestadMarion John OngNoch keine Bewertungen
- 博士班資格考 電子學題庫Dokument15 Seiten博士班資格考 電子學題庫Adil KhanNoch keine Bewertungen
- MOSFET Biasing TechniquesDokument33 SeitenMOSFET Biasing TechniquesKesani Venkat Narsimha ReddyNoch keine Bewertungen
- Pulse Oximeter DesignDokument31 SeitenPulse Oximeter DesignPraba KaranNoch keine Bewertungen
- Understanding Current Control Snva555Dokument30 SeitenUnderstanding Current Control Snva555boteem20070% (1)
- Erno Borbely Fet Articel 2Dokument5 SeitenErno Borbely Fet Articel 2Srdjan ProkicNoch keine Bewertungen
- Norton's Theorem ExplainedDokument19 SeitenNorton's Theorem ExplainedVedashree ShetyeNoch keine Bewertungen
- Network Filters Transmission LinesDokument11 SeitenNetwork Filters Transmission Linesmaacpie8353Noch keine Bewertungen
- CSI and VSI (ch-1) DifferenceDokument9 SeitenCSI and VSI (ch-1) DifferenceGoud SannyNoch keine Bewertungen
- TB62747AFG ToshibaDokument20 SeitenTB62747AFG ToshibavinNoch keine Bewertungen
- Norton's Theorem: Experiment No.7Dokument5 SeitenNorton's Theorem: Experiment No.7Abera DeressaNoch keine Bewertungen
- Slides - 17 - CH 18 - Network Theorems (Ac) - Updated - 2Dokument59 SeitenSlides - 17 - CH 18 - Network Theorems (Ac) - Updated - 2Tamim ANoch keine Bewertungen
- Electrical ElectronicsDokument92 SeitenElectrical ElectronicstechNoch keine Bewertungen
- Phase-Controlled Converter: ObjectivesDokument8 SeitenPhase-Controlled Converter: Objectiveskafle_yrsNoch keine Bewertungen
- Input-controlled Buck Converter Modeling for Photovoltaic ApplicationsDokument5 SeitenInput-controlled Buck Converter Modeling for Photovoltaic ApplicationsIlva Leandro ElenaNoch keine Bewertungen
- Power Electronics For RenewablesDokument22 SeitenPower Electronics For RenewablesShiv Prakash M.Tech., Electrical Engineering, IIT(BHU)Noch keine Bewertungen
- IEEE Journal Article Summary: A 10-b, 500-MSample/s CMOS DACDokument11 SeitenIEEE Journal Article Summary: A 10-b, 500-MSample/s CMOS DACBhavin DesaiNoch keine Bewertungen

























![IET Power Electronics Volume 4 Issue 9 2011 [Doi 10.1049_iet-Pel.2010.0363] Jung, J.-h.; Ahmed, S. -- Flyback Converter With Novel Active Clamp Control and Secondary Side Post Regulator for Low Standby Power Consumption Under High](https://imgv2-2-f.scribdassets.com/img/document/220209509/149x198/8baf096670/1429428106?v=1)

























































































