Beruflich Dokumente
Kultur Dokumente
Review of Theoretical Approaches To Nonlinear Supercavitating Flows
Hochgeladen von
Afshin BiOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Review of Theoretical Approaches To Nonlinear Supercavitating Flows
Hochgeladen von
Afshin BiCopyright:
Verfügbare Formate
Review of T h eoretical A p p r oach es t o
Nonlinear Supercavitating Flows
G.M. Fridman
& A.S. Achkinadze
Department of Applied Mathematics & Mathematical Modelling
Department of Ship Theory
St.Petersburg State Marine Technical University
Lotsmanskaya str., 3
190008, St.Petersburg
Russia
Summary: The purpose of the paper is to present a brief review of basic theoretical approaches to two-
dimensional (2D) nonlinear supercavitating ows in the framework of theory of jets in an ideal uid. In this
connection discussed are Kirchho and Zhukovsky methods, Chaplygin method of singular points, method
of integral equation, etc. A simple model problem of a supercavitating (SC) at plate at zero cavitation
number = 0 is chosen to illustrate the core of the methods and their comparative eectiveness. Some
mathematical aspects of open and closed cavity closure schemes are studied as well with use of Chaplygin
method applied to a SC plate with a spoiler at nonzero cavitation number. An inuence is demonstrated of free
and solid boundaries onto the cavity volume and hydrodynamic characteristics of the plate. Mathematica 4.0
software is used as a main tool for the ow pattern visualization of the problems under consideration. An
analytical exact solution is presented to the 2D nonlinear ow problem of an arbitrary supercavitating foil and
numerical results are discussed.
1. Basic assumptions of theory of jets in an ideal uid
Theory of jets in an ideal uid is appeared to be one of the best-studied elds of theoretical hydrodynamics
dealing with ows conned by free and solid boundaries, the pressure constancy condition being satised on
the former. H. Helmholtz [8] and G. Kirchho [12] were the rst to formulate and solve some relatively simple
problems of the theory of jets. Nowadays one can nd brilliant surveys of the advances and development in the
theory in books by Birkho & Zarantanello [1], Gilbarg [5] and Gurevich [7] (see also English translation of the
book [6]). The works by Tulin [23], Terentev [21] and Maklakov [16] should also be distinguished.
As it follows from the name of the theory itself, we suppose a uid to be an ideal one. For simplicity we neglect
the gravity inuence and specify that the ow be 2D, steady and incompressible. The ow has a velocity
potential if
v = grad ,
where v = v
x
+iv
y
is the total velocity vector in the ow. The harmonic function (x, y) is the real part of an
analytical function of complex potential (or characteristic function) w(z) = +i, where z = x +iy and (x, y)
denote axes of rectangular Cartesian coordinate system. The imaginary part of w is called stream function ,
the velocity vector being given by
v
x
=
x
=
y
; v
y
=
y
=
x
.
Function has a constant value on each separate streamline including free surfaces while increases along a
streamline in downstream direction. A so called conjugate velocity can be introduced as follows
dw
dz
= v
x
+ iv
y
= v e
i
, (1)
which is a mirror image of velocity vector v with respect to y-axis. In formula (1) v denotes absolute value of
the vector v and is an angle made by the vector to x-axis.
As a result, a problem in question is considered to be solved when the complex potential function w(z) = w(x+iy)
is found. As is customary, on all the solid boundaries of a given topography the kinematic (ow tangency)
condition is applied, which requires the uid ow to be tangent to the surface of the boundary, that is derivative
of with respect to normal vector n be equal to zero. On the other hand the free streamline condition of
constant speed is satised on all the free surfaces. The main diculty of such free surface ow problems is
connected to nonlinearity of the boundary conditions which are, moreover, to be satised on the surfaces of
unknown geometry.
Paper presented at the RTO AVT Lecture Series on Supercavitating Flows, held at the von Krmn
Institute (VKI) in Brussels, Belgium, 12-16 February 2001, and published in RTO EN-010.
10-1
2. Model problem cavitating plate at zero cavitation number
Consider a 2D cavitating at plate in a uniform ow with velocity absolute value at innity v
and angle of
attack , see gure 1. The origin of the Cartesian coordinate system is taken at the plates trailing edge, xaxis
being directed downstream and y upwards. There is an incident stream with speed v
coming from the left.
The region occupied by the uid is bounded by the plate [AB] and by two semi-innite free surfaces (AC) and
(BC).
x
y
C
C
A
0
O
B
C
q
v
Figure 1: Flow pattern for the cavitating at plate at zero cavitation number.
Assume the velocity on the streamlines v
0
to be equal to v
and therefore the cavitation number
=
p
p
0
v
2
/2
= 0 ,
where p
and p
0
denote the pressure at innity and within the cavity correspondingly. It readily follows from
the Bernoulli equation for an upstream reference point and free surface-boundary point
p
0
+
1
2
v
2
0
= p
+
1
2
v
2
.
We render all the parameters of the problem nondimensional by a suitable choice of scale so that v
= 1 and
plate length equals to unit l = 1.
2.1. Kirchho method
To solve the problem under consideration, it is convenient to determine the function
(w) = v
dz
dw
(2)
rather than the complex potential w(z) = + i itself. Indeed, if function (w) is found then z(w) is easily
dened as
z =
1
v
_
v
dz
dw
dw =
1
v
_
dw. (3)
Note that its often no sense in reversing function z(w) to nd w(z), all the more so that the operation is rather
cumbersome.
So the erux of the problem is to determine w and as functions of the same single variable so that equation (3)
can be integrated. Since function (w) denes a conformal mapping of w-plane onto the -plane, one has to
determine these regions and map one to another.
If one choses the stream function to have the value zero on the dividing streamline (COAC) and (COBC) and
since all the streamlines are by denition lines of constant and therefore become lines parallel to the -axis,
then the w-plane has the form shown in gure 2. The platecavity combination appears as a semi-innite slit
in this plane. The velocity potential at the edges of the plate (points A and B) has the values
A
and
B
.
It is easy to see that
=
v
v
e
i
.
10-2
0
B
A C
C
w
O
q
q
Figure 2: The complex velocity potential w.
On [OA] one has = and v
/v ratio varies from innity at point O to unit value at point A. On the
-plane interval [OA] corresponds to a semi-innite line inclined at angle to the positive direction of x-axis
and starting from the point
A
= e
i
. A symmetrical line inclined at angle and starting from the point
B
= e
i
corresponds to another part of the plate [BO]. Angle varies from to zero and ratio v
/v = 1
on streamline (AC). Further on, on streamline (CA) angle increases from zero to and v
/v remains
the same. Thus free surface on the z-plane becomes a half-circle of unit radius on the -plane. The -plane is
depicted in gure 3. A stagnation point C on the z-plane corresponds to
C
= 1.
A
1
C
B
O
O
Re
Im
A
= e
i
B
= e
i
Figure 3: The plane.
To obtain a solution to the problem under consideration it is sucient to transform w-plane onto -plane, both
being given in gures 2 and 3. Such a problem is fairly simple and much easier than that of determining harmonic
function in the region z with unknown free boundaries. The substitution of the complicated boundary value
problem by a simple problem of conformal mapping is the core of the Kirchho method.
The appropriate w mapping can be found step by step.
First, one transforms -plane to the rst quadrant of the auxiliary -plane, see gure 4, by conformal mapping
= a
A
+
A
= a
e
i
+ e
i
.
q
q
B O A
C
B
a
0
i
Figure 4: The plane.
With the correspondence between and planes we have for point C
i = a
1 e
i
1 + e
i
, therefore a = cot
2
.
Second, a new variable
1
=
2
varies in the upper semi-plane, see gure 5.
10-3
q q q
B O A C B
1 0 a
2
Figure 5: The
1
plane.
q q q
C B O A C
B
0 1
Figure 6: The t plane.
On the other hand, transformation t =
_
w/
B
transforms w-plane onto the upper semi-plane, see gure 6.
Finally, all we need do is to transform t-plane onto
1
-plane by using formula
1
=
a
2
+t
1 t
,
which results in
=
A
a
_
w +
_
A
+
w
a
_
w
_
A
+
w
, (4)
where radical
w is positive on the interval [OB] and negative on [OA],
A
=
B
= e
i
and a = cot(/2).
Referring to gures 5 and 6, it is obvious that
_
B
= a
2
= cot
2
2
,
while parameter
A
remains still unknown.
To determine the unknown parameter we have a condition connected with plate length, see gure 1:
z
B
= l e
i()
.
That is why from equation (3) we nd
z
B
=
1
v
B
_
A
dw =
A
v
B
_
A
a
_
w +
_
A
+
w
a
_
w
_
A
+
w
dw.
It is a complicated integration but it is seen that
1
v
B
_
A
dw =
1
v
_
0
()
dw
dt
()
dt
d
1
()
d
1
d
() d ,
where
() =
A
a +
a
;
dw
dt
() = 2
B
2
a
2
2
+ 1
;
dt
d
1
() =
1 +a
2
(
2
+ 1)
2
;
d
1
d
() = 2
and the following relation holds:
l e
i()
= 4
A
B
v
(1 +a
2
)
_
0
( +a)
2
(
2
+ 1)
3
d .
10-4
As a result one obtains
B
= l v
2 sin
4
2
2 + sin
2
cos
2
. (5)
The total force F acting on the cavitating at plate is calculated by integration of pressure distribution coecient
C
p
F =
iv
2
2
zB
_
zA
C
p
dz , (6)
where
C
p
=
p p
v
2
/2
is given by Bernoulli equation
p p
=
2
(v
2
v
2
) =
v
2
2
_
1
1
||
2
_
.
Taking into account that dw = v
dz on the plate, we nd
F =
iv
2
B
_
A
_
1
1
||
2
_
dw.
Using the same technique as above, we arrive at the following expression for the force coecient
C
F
= C
D
+ i C
L
=
F
v
2
l/2
= = e
i(/2)
2 sin
4 + sin
. (7)
It is obvious from what was dealt with above that Kirchho method is quite complicated even for such a simple
problem of a cavitating at plate at zero cavitation number. Nevertheless it was the rst to enable one to solve
free surface ow problems. A new important step in this direction was made by N. Zhukovsky in 1890 [26]. He
proposed a new approach to solution of theory of jets in an ideal uid problem, which was signicantly improved
as compared to Kirchho one.
2.2. Zhukovsky method
A method proposed by Zhukovsky can be applied to the 2D free surface ow problems with 1-connected ow
region bounded by only straight solid boundaries. A new function (so-called Zhukovsky function)
= log = log
dw
v
dz
= log
v
v
+ i (8)
is introduced instead of Kirchhos = v
dz/dw function. Another improvement, following to Zhukovsky
method, is that one has to connect functions w and through variable t varying in the upper semi-plane rather
than directly determine a relationship between the two functions. Being aware of dependences w(t) and (t),
one can eliminate variable t and hence get a Kirchhos solution to the problem. However, this operation is
quite aimless because of the following relationships
= e
(t)
, z =
1
v
_
dw =
1
v
_
e
dw
dt
dt , (9)
enabling one to solve the problem.
The meaning of a novel approach is as follows. It was shown in the previous section that w-plane is bounded
by horizontal lines = const which are images of streamlines in the physical z-plane. On the other hand,
-plane is bounded by vertical and horizontal lines in the case of straight solid walls in z-plane. Indeed, such
solid boundaries are lines of constant , that is imaginary part of , while free surfaces, where pressure (speed)
constancy condition is satised, are lines of constant real part of . Therefore w and planes are bounded by
polygonal segments. As a result, both w and domains can be transformed onto the upper half of auxiliary
t-plane by using SchwarzChristoel transformation.
10-5
SchwarzChristoel formula allows one to transform half-plane t into interiority of a polygon with n vertexes
(n-gon) on the -plane. It is assumed that each vertex is of angle
i
2, i = 1, . . . , n and
n
i=1
i
= (n 2) .
It this case the formula is as follows:
= C
1
_
n
i=1
(t t
i
)
i/1
dt +C
2
, (10)
where points t
i
correspond to the polygon vertexes. If t
k
= then term (t t
k
)
k
/1
in the integrand should
be excluded. Right-hand side of formula (10) includes 2n + 3 unknowns, namely, n real parameters t
1
, . . . , t
n
,
n1 of n real parameters
i
, i = 1, . . . , n and four real parameters in two complex ones C
1
and C
2
. An n-gon is
totally described by 2n coordinates of its vertexes on -plane what generates 2n conditions. Therefore one can
arbitrarily chose three of 2n + 3 unknown parameters, say t
1
, t
2
and t
3
. This fact is a version of a well-known
postulate that any conformal mapping is determined by three preassigned boundary points.
Consider the same model problem of cavitating at plate at zero cavitation number formulated above.
We already have got the relationship between w and t planes, see gures 2 and 6:
w =
B
t
2
. (11)
It is to be emphasized that in a neighborhood of point t = 0
dw
dt
= 2
B
t = O(t) ,
where O(t) denotes a quantity which is of the same order of magnitude as t.
On streamline (AC), v = v
wherefrom log(v
/v) = 0 while angle increases from up to value zero and
therefore = log(v/v
) + i varies from i to 0. On streamline (BC) function varies from i( ) to
zero. On the interval [OA] of the cavitating plate imaginary part of is a constant: Im = while its real
part decreases from innity down to zero. At point C angle varies in a jumplike manner from up to
, see gure 7.
log
v
v
0
r
r
r
O
O A
C
B
Figure 7: The plane.
Thus, domain on -plane corresponding to a region occupied by the uid on z-plane is a triangle OAB with
zero angle at innite point O and right angles at points A and B. Assume that t
O
= 0, t
B
= 1 and t
C
= ,
see gure 6, (a postulate about three preassigned boundary points). Then SchwarzChristoel formula (10)
reduces to
(t) = C
1
t
_
1
dt
t
_
(t 1)(t +a
2
)
+C
2
,
where a
2
=
_
A
/
B
. At point B, (1) = i( ), that is why C
2
= i( ). The integral above yields
(t) = C
1
_
1
a
arcsin
(1 a
2
)t + 2a
2
(1 +a
2
) t
+
2a
_
+ i( )
10-6
At point A, (a
2
) = i, that is why C
1
= ia and, nally,
(t) = i arcsin
(1 a
2
) t + 2a
2
(1 +a
2
) t
+ i
_
2
_
. (12)
Using a relationship between the arc sine function and natural logarithm, expression (12) can be re-written as
(t) = log
(1 +a
2
) t
ia
2
(t 2) it + 2a
_
(t 1)(t +a
2
)
+ i
_
2
_
. (13)
The system of two nonlinear conditions
() = 0 ; and z
B
= l e
i()
allows the two unknowns
A
and
B
to be derived. The former gives
a =
4
_
B
= cot
2
,
while the latter merit some additional explanation. Equations (9), (11) and (13) can be combined to give
z
B
=
1
v
1
_
a
2
v
dz
dw
dw
dt
dt ,
wherefrom
l =
B
v
_
1 +
4
sin
_
sin
4
2
,
what coincides with expression (5).
The total force F acting on the cavitating at plate is calculated in a manner of the previous section
F =
iv
2
2
zB
_
zA
C
p
dz =
iv
2
2
1
_
a
2
C
p
dz
dw
dw
dt
dt ,
where
C
p
= 1
e
2(t)
and
dz
dw
=
1
v
e
(t)
and give the same result just as above.
Nowadays some modications of Zhukovsky method (so-called hodograph method) is widely used and, for
instance, was applied to ow domains bounded by not only polygonal segments but by smooth curves as
well [11]. Note that the rst adaptation of the classical Zhukovsky (hodograph) method to ow past a body
with a curved topography was considered by Levi-Civita [15] and Villat [24].
2.3. Mixed boundary value problem method
This method seems to be easy to understand and is very often used. The solution is derived in two steps.
The rst one allows us to nd complex potential w() or its derivative dw/d by mapping w-plane onto the
preassigned auxiliary -domain (in a manner of Zhukovsky method). In the case of a cavitating plate, using
w-plane (depicted in gure 2) and auxiliary upper half-plane, see gure 8, we get
dw
d
= N , (14)
where N denotes a real parameter to be determined.
The second step is formulation of a mixed boundary value problem for Levi-Civita [15] function
LC
= i log
dw
v
dz
= + i log
v
v
= + i . (15)
It is obvious that Levi-Civita function is a product of the imaginary unit i and Zhukovsky function (8).
10-7
r r r
C B O A C
0 b 1
= 0 = 0
=
=
Figure 8: The plane.
With the correspondence between physical z and auxiliary planes the mixed boundary value problem, see
gure 8, is:
= 0 as 1 and b
=
_
_
_
, as 1 0 ;
, as 0 b .
where b is a coordinate (to be determined) of image of point B in -plane.
The solution to the mixed boundary value problem (RiemannHilbert problem [17]) is obtained via formulae
proposed by Keldysh and Sedov [10]. The formulae are extremely useful for both nonlinear and linearized
cavitating ow problem and used also in many other elds of uid mechanics and so merit some additional
explanation.
Below presented are KeldyshSedov formulae in the case of the upper semi-plane. It can be readily re-written
for another -regions like circle, etc.
The RiemannHilbert problem is formulated for a function f(z) = u(z) + iv(z) which is holomorphic in upper
semi-plane z = x + iy, its real part u(z) being given on a set of segments [a
k
, b
k
], k = 1, . . . , N on the x-axis
and its imaginary part v(z) being given on the other portion of x-axis. Following to [10], three types of solution
to the problem exist:
solution unbounded at all points a
k
, b
k
( class):
f(z) =
1
i R(z)
_
_
_
N
k=1
b
k
_
a
k
u()R()
z
d + i
N
k=1
a
k+1
_
b
k
v()R()
z
d +P
N
(x)
_
_
_
, (16)
where a
1
= a
N
+1, P
N
(x) is a polynomial of degree N or N 1 depending on behaviour of f(z) at innity, and
R(z) =
_
N
k=1
(z a
k
)(z b
k
) ;
solution bounded at all points a
k
and unbounded at all b
k
(0 class) as f() = 0:
f(z) =
1
i
R
a
(z)
R
b
(z)
_
_
_
N
k=1
b
k
_
a
k
u()
z
R
b
()
R
a
()
d + i
N
k=1
a
k+1
_
b
k
v()
z
R
b
()
R
a
()
d
_
_
_
, (17)
where
R
a
(z) =
_
N
k=1
(z a
k
) , R
b
(z) =
_
N
k=1
(z b
k
) ;
solution bounded at all points a
k
, b
k
(0 0 class) as f() = 0:
f(z) =
R(z)
i
_
_
_
N
k=1
b
k
_
a
k
u()
z
d
R(z)
+ i
N
k=1
a
k+1
_
b
k
v()
z
d
R(z)
_
_
_
. (18)
10-8
The latter solution exists if and only if the relationship holds
N
k=1
b
k
_
a
k
u()
R(z)
d + i
N
k=1
a
k+1
_
b
k
v()
R(z)
d = 0 . (19)
Coming back to solution of the model problem, one has to use the latter formula (18) along with additional
condition (19) to derive
LC
() for the free surfaces detaches smoothly from the edges of the plate A and B and
therefore velocity absolute value is nite there. Thus, using boundary conditions, one arrives at the expression
LC
() =
1
_
( + 1)( b)
b
_
1
(t)
_
(1 +t)(b t)
dt
t
which yields
LC
() = i log
1 +
b +
1 +
. (20)
Condition (19) gives
+
2
+ arcsin
1 b
1 +b
= 0 , (21)
or b = tan
2
(/2).
Expressions (14) and (20) give analytical solution to the problem. Conformal mapping is
z() =
_
1
dw
d
exp(i
LC
()) d .
Condition z
B
= z(b) = l e
i()
enables one to nd unknown parameter N in the form
N =
8 l v
4 + sin
cos
4
2
.
Taking into account that
B
= w(b) = Nb
2
/2, one obtains the relationship coinciding with (5).
Note that the method of mixed boundary value problem is eectively applicable to free streamline problems
with curved topography of an obstacle. Actually in this case just (z) is given and function () = Re
LC
is
unknown on -axis because it is not a constant and the relationship z() is yet to be found. A special integral
equation is formulated is a manner presented below in section 5.
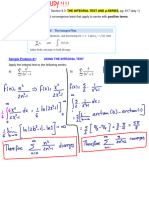
2.4. Chaplygin method of singular points.
Chaplygin method of singular points based on the idea of determining of a holomorphic function in ow domain
and therefore in auxiliary complex plane, the functions zeros and poles being known and Liuvilles theorem
applied. The theorem guarantees uniqueness of a solution obtained. The auxiliary region, being the image of
the ow region, is chosen to be bounded by straight lines, segments and circular arcs so that one could cover
all the auxiliary complex plane by mirror images of the initial domain of auxiliary variable range. Quadrants,
rectangles, disk sectors, etc. are usually used as such ranges depending on special features of a problem under
consideration.
To get the desired solution to the problem, one has to determine two analytical functions, namely derivatives
of the complex potential with respect of physical z and auxiliary u variables as functions of u:
dw
du
(u) and (u) =
dw
v
dz
=
v
v
e
i
.
Conformal mapping which transform ow region into an auxiliary one, then, is
z(u) =
_
dz
du
du =
_
dz
dw
dw
du
du .
10-9
Chaplygin practically introduced some basic postulates (though he had never published them) which of consid-
erable assistance while nding a derivative of w. If w(u) transforms w-region into u-region then:
a third-order pole of function dw/du corresponds to a jet of innite width;
a second-order pole of function dw/du corresponds to a jet of semi-innite width (that is, jet bounded by a
free or rigid surface). Such a semi-innite jet is called ocean in [1];
a rst order pole of function dw/du corresponds to a jet of a nite width;
in points of auxiliary u-plane corresponding to a vertex of solid wall bounding ow region, function (u) has
an exponential zero or singularity depending on angle of the vertex;
function dw/du has a zero, more precisely behaves like O(t t
0
), in point t
0
corresponding to a point on
physical z-plane where a streamline divides. It can be a stagnation point or leading edge of stagnation zone,
etc.;
conformality condition for derivative of complex potential dw/du often does not satised at points where free
streamlines spring from the body (jet detachment points). To avoid this, one has to chose a form of auxiliary
u-region so that its boundary in points corresponding to jet detachment points makes right angles.
function dw/du has a zero or pole (depending on specic features of the problem) in points where conformality
condition does not satised for w u transformation.
Now apply the method of singular point to the model problem considered above with Kirchho and Zhukovsky
methods, see gure 1. The rst quadrant of auxiliary u-plane is chosen as a region to be transformed into the
ow domain, see gure 9. As is customary, the coordinates of three points O, B and C on the boundary of
the rst quadrant of u-plane are chosen arbitrarily and location of point A is to be found. Actually the gure
coincides with gure 4 for -plane used in section Kirchho method.
q
q
B O A
C
B
a
0
i
u
Figure 9: The auxiliary u-plane.
Following to the main postulate of Chaplygin method, nd both derivatives of w with respect of z and u as
functions of u = + i.
Function (u) = dw/(v
dz) is a bounded function in the ow region. It becomes zero in just one stagnation
point O, where u = a. On the plate [AOB] corresponding to real -axis of u
arg (u) = (u) =
_
, as 0 u a ;
, as a u ,
while on free streamlines (AC) and (BC) (imaginary -axis of u), |(u)| = 1. Due to the Schwarz principle
of symmetry, all the zeros of (u) becomes zeros in corresponding mirror points with respect to the imaginary
axis and poles in corresponding mirror points with respect to the real axis. That is why, being continued onto
the whole u-plane, function (u) has a zero at point u = a and a pole in u = a. Then the following ratio
_
u a
u +a
_
(u)
_
is a bounded and holomorphic function everywhere including innite point and therefore is a constant due to
Liouville theorem. Thus
(u) =
dw
v
dz
=
v
v
e
i
= N
1
u a
u +a
,
where N
1
is a constant dened by condition (0) = e
i
which yields N
1
= e
i()
and nally
(u) =
dw
v
dz
= v e
i
= e
i()
u a
u +a
. (22)
10-10
Derivative dw/du has a third-order pole at innite point C, where u = i, and zeros at stagnation point O
(u = a) and at point A (u = 0) where conformality condition does not satised. There is no other pole or zero
in the rst quadrant of u-plane for dw/du. On continuation of the function into the whole u-plane by mirror
mapping of the rst quadrant with respect to real and imaginary axes of u (where = Imw = const) we get
additional third-order pole at point u = i and zero at point u = a. Just as above, the ratio
_
u(u
2
a
2
)
(u
2
+ 1)
3
_
dw
du
_
is a bounded and holomorphic function everywhere including innite point and therefore is a constant due to
Liouville theorem. Therefore
dw
du
= N
u(u
2
a
2
)
(u
2
+ 1)
3
, (23)
where N is a real constant.
Two expressions (22) and (23) allows one to solve the problem under consideration which has two unknown pa-
rameters a and N. With the correspondence between z-plane and u-plane, the conformal mapping transforming
latter into former is as follows
z(u) =
u
_
0
dz
dw
dw
du
du =
N
v
e
i()
u
_
0
u (u +a)
2
(u
2
+ 1)
3
du . (24)
Note that (23) and (24) can be readily integrated to give
w(u) =
N
4(1 +a
2
)
_
u
2
a
2
u
2
+ 1
_
2
; (25)
z(u) =
N
4v
e
i()
_
a arctanu +
u
_
u
3
+a(u
2
1) +a
2
u(u
2
+ 2)
_
(1 +u
2
)
2
_
. (26)
Two conditions
(i) = 1 , and z
B
= z() = l e
i()
generate the following nonlinear system in two unknowns
e
i()
i a
i +a
= 1 ;
N
v
u
_
0
u (u +a)
2
(u
2
+ 1)
3
du = l e
i()
which can be rewritten to yield
a = cot
2
; N = v
l sin
2
2
16
4 + sin
. (27)
It is seen from (25) that
B
= w() =
1
4
N sin
2
2
,
A
= w(0) =
1
4
N cos
2
2
cot
2
2
,
what coincides with expression (5).
Taking into account that on the plate [AB]
C
p
= 1
v
2
v
2
= 1 |(u)|
2
= 1
1
v
2
dw
dz
dw
dz
, (28)
the total force F can be derived (6):
F =
iv
2
2
zB
_
zA
C
p
dz
10-11
-1
-0.5
0
0.5
1
1.5
-1 -0.5 0 0.5 1 1.5
A
B
O
= 50
o
Figure 10: Flow pattern for the cavitating at plate at zero cavitation number and = 50
o
.
to give the force coecient in the form
C
F
=
i
l
_
0
_
1
1
v
2
dw
dz
dw
dz
_
dz
dw
dw
du
du =
i
l
_
_
_
0
dz
du
du
1
v
2
_
0
dw
du
dw
dz
du
_
_
=
=
i
l
_
_
z
B
z
A
1
v
2
_
0
dw
du
dw
dz
du
_
_
.
(29)
Using expressions (22) and (23) one easily obtains coecient C
F
, see (7).
0
0.2
0.4
0.6
0.8
1
0 15 30 45 60 75
39.26
o
C
L
(
) 0.514
, deg
C
L
C
D
Figure 11: Lift and drag coecients C
L
and C
D
versus angle of attack .
Flow pattern z(u) = x+iy can be calculated in a parametric form from expression (24) or (26). The coordinates
of the stagnation point O are as follows
z
O
= z(a) = l e
i()
sin
4 + sin
_
+ 2 cot
2
+ sin2
_
.
Flow pattern for the cavitating plate at = 50
o
and zero cavitation number is depicted in gure 10. Stagnation
point O is shown as well. Figure 11 illustrates behaviour of lift and drag coecients C
L
and C
D
versus angle
10-12
of attack. It is obvious that the lift equals to zero for = 0 and /2. The corresponding curve attains its
maximum value C
L
0.514 at
39.26
o
. Hydrodynamic neness
Q =
C
L
C
D
+C
f
where C
f
denotes friction coecient is shown in gure 12 for C
f
= 0.003 and 0.008. The former curve attains
its maximum (11.237) at
max 1
= 2.5
o
while the latter one (6.798) at
max 2
4.07
o
.
0
2
4
6
8
10
0 5 10 15
, deg
Q
Q =
C
L
C
D
+C
f
C
f
= 0.008
C
f
= 0.003
Figure 12: Hydrodynamic neness versus angle of attack for friction coecient C
f
= 0.003 and 0.008.
It is to be underlined that Chaplygin method of singular point appears to be the most eective while solving 2D
nonlinear problems of theory of jets in an ideal uid. It can be readily applied to considerably more complicated
problems than that discussed above and gives quite satisfactory results.
3. A variety of cavity closure schemes
Consider a at plate with attached cavity, the pressure within the cavity being p = p
0
. In the ow region the
following dynamic condition is satised p p
0
, or using Bernoulli integral
v = v
0
on the cavity boundary ; v < v
0
in the ambient uid.
Then the cavitation number can be rewritten as
=
p
p
0
v
2
/2
=
v
2
0
v
2
1 > 0 ,
where v
0
is an absolute velocity value on the cavity boundary. As a result, the cavity length becomes nite
because of the cavity pressure is less than ambient, including that at innity. The smaller the cavitation number,
the larger the cavity extent and in a limiting case, as 0, the cavitation ow coincides with a streamline one
considered above.
The Brillouin paradox [2] is well-known: cavity of nite length with closed continuous boundary is mathemati-
cally impossible. Indeed, if the upper and lower parts of the cavity make a closed contour then a stagnation point
should appear. That is impossible due to the requirement of a constant absolute velocity value on the cavity
boundary. That is why a set of cavity closure models has been developed, for the denitions and properties of
which reference may be made to [1, 5, 7, 23]. Each scheme has its own advantages and disadvantages from the
mathematical and physical viewpoint and should be chosen depending on specic features of the problem at
hand.
The section contains a set of analytical solutions to the nonlinear problem of a supercavitating ow past
a at plate of chord l, with angle of attack and cavitation number > 0, the cavity closure scheme being
varied. The schemes considered are as follows: TulinTerentev (single spiral vortex termination), EfrosKreisel
Gilbarg (re-entrant jet termination), Riabouchinsky (symmetrical plate termination), Tulin (double spiral vortex
termination), ZhukovskyRoshko (horizontal plates termination). All the analytical solution were derived via
Chaplygin method of singular points. Numerical results were obtained in Mathematica for Windows computer
mathematical environment.
10-13
3.1. TulinTerentev scheme: single spiral vortex termination
Consider a cavitating plate, see gure 13. A cavity closure scheme involving single spiral vortex is accepted as a
model of cavity termination. Tulin [23] was the rst to propose the scheme which was later thoroughly analysed
by Terentev [7]. In the point of cavity collapse the model requires
(w)
A
w
,
where A > 0.
x
y
A
B
C
+
C
D
z
O
D C
r
r
B O A
C
B
a
0
i
u
s
D (u
)
Figure 13: Flow pattern (z-plane) and auxiliary u-plane for the cavitating at plate, TulinTerentev scheme.
On the dividing (zero) streamline, where = 0, the following relationship holds in a neighborhood of point C
lim
_
arg
dw
dz
_
= ,
what corresponds to two spiral streamlines with centers at points C
+
and C
. Sketch of the ow in the region
of the cavity termination is shown in gure 14.
Figure 14: Schematics of the ow in the vicinity of the cavity termination, from [7].
Following to the main postulates of Chaplygin method, with the correspondence between physical z-plane and
rst quadrant of auxiliary u-plane, see gure 13, and applying Schwarz principle of symmetry to cover all the
u-plane, one obtains derivatives of complex potential w in the form
dw
dz
= v
0
e
i()
u a
u +a
exp
_
2bu
u
2
+ 1
_
;
dw
du
= N
u(u
2
+ 1)(u
2
a
2
)
(u
2
u
2
)
2
(u
2
u
2
)
2
,
(30)
10-14
wherefrom
z(u) =
N
v
0
e
i()
u
_
0
u(u
2
+ 1)(u +a)
2
(u
2
u
2
)
2
(u
2
u
2
)
2
exp
_
2bu
u
2
+ 1
_
du . (31)
It is easy to see that stagnation point O generates zeros at point u = a for both the derivatives, point at
innity D corresponding to u = u
i
nfty = c+id generates second-order pole of dw/du and at point u = i (image
of points C, C
+
and C
), dw/du = O(u i) and = O(u i)
1
.
Three conditions
dw
dz
(u
) = v
; z
B
= z() = le
i()
;
_
u
dz
du
du = 0
(32)
give a nonlinear system of ve equations in ve unknown parameters of the problem a, b, c, d and N to be
derived. The latter condition implies an existence of a contour completely surrounding the plate and the cavity
on the rst Riemann sheet and actually is a cavity closure condition. Terentev was the rst to propose such
a relationship [20] which can be used to tell so-called closed cavity closure schemes from open ones. All the
calculations are eectively accomplished with use of Mathematica for Windows software.
-0.2
0
0.2
0.4
0.6
0.8
-1 -0.75 -0.5 -0.25 0 0.25 0.5 0.75 1
A
B
O
C
+
C
C
L
= 1.158
C
D
= 0.668
= 30
o
= 1
Figure 15: Flow pattern for the cavitating at plate at = 1 and = 30
o
.
Force coecient C
F
is derived in a similar manner of formula (29):
C
F
= i
1 +
l
_
_
z
B
z
A
1
v
2
0
_
0
dw
du
dw
dz
du
_
_
(33)
Figure 15 illustrates the ow patter for = 30
o
and = 1. It is to be emphasized that single spirals at point C
shrink very rapidly and so the region of double-sheeted ow is quite small. The ow region in the vicinity of
point C
is shown in gure 16. Note that vertical distance between C
+
and C
is directly connected with
drag coecient C
D
:
C
D
= (1 +)
l
.
3.2. EfrosKreiselGilbarg model: re-entrant jet termination
The ow pattern is depicted in gure 17. The model proposed almost simultaneously by Efros, Kreisel and
Gilbarg [1] involves a re-entrant jet of unknown width and direction at innity point C which lies on
the second Riemann sheet. Gurevich [7] was the rst to successfully apply the scheme to the problem of a
supercavitating plate which is perpendicular to an inow. An additional stagnation point E is appeared in the
vicinity of the cavity trailing edge.
10-15
0.097
0.0971
0.0972
0.0973
0.0974
0.0975
0.0976
0.0977
0.0978
1.11 1.1105 1.111 1.1115
Figure 16: Flow region in the vicinity of lower single spiral vortex.
x
y
A
B
D
z
s
E
C
r
r
B O A
C
B
a
0
i
u
r
D (u
)
r
E (u
0
)
Figure 17: Flow pattern (z-plane) and auxiliary u-plane for the cavitating at plate, EfrosGilbarg scheme.
Adopting rst quadrant of auxiliary u-plane as an image of the ow region, with the correspondence between
physical z and auxiliary u planes (see gure 17) solution to the problem is as follows:
dw
dz
= v
0
e
i()
u a
u +a
(u u
0
)(u u
0
)
(u +u
0
)(u +u
0
)
;
dw
du
= N
u(u
2
a
2
)(u
2
u
2
0
)(u
2
u
0
2
)
(u
2
+ 1)(u
2
u
2
)
2
(u
2
u
2
)
2
,
(34)
where u
0
= b + ic and u
= d + if. These two expressions can be combined to give
z(u) =
N
v
0
e
i()
u
_
0
u(u +a)
2
(u
2
+ 1)
(u +u
0
)
2
(u +u
0
)
2
(u
2
u
2
)
2
(u
2
u
2
)
2
du . (35)
The same conditions (32) yield a nonlinear system of ve equations in six unknowns a, b, c, d, f and N. It is
easy to see that the solution is not unique for the number of unknowns is greater than the number of conditions.
Nevertheless, one can use an additional condition connected with the direction of the re-entrant jet at the point
of innity C, see gure 18. Both the asymptotic analysis and numerical results for the cavitating at plate have
shown angle not to signicantly aect the hydrodynamic coecients and even most of the ow pattern. That
is why it seems reasonable to consider the parameter as a given one. Thus, an additional condition is as follows
dw
dz
(i) = v
0
e
i
.
Using residue theory, one arrives at the following relationships (which are correct for an arbitrary cavitating
hydrofoil):
C
D
=
2q
v
l
_
1
v
0
v
cos
_
; C
L
=
2q
v
l
_
q
v
0
v
sin
_
, (36)
10-16
where q denotes the ow rate in the re-entrant jet C and is circulation along a large contour completely
surrounding the cavitating foil and the cavity and enclosing most of the ow. Note that
res =
_
u
dF
d
d = +iq
and, moreover,
q = N
(1 +a
2
)
_
(1 +b
2
c
2
)
2
+ 4b
2
c
2
_
2 ((1 +d
2
f
2
)
2
+ 4d
2
f
2
)
2
.
-0.2
0
0.2
0.4
0.6
0.8
-1 -0.5 0 0.5 1 1.5
E
A
B
O
C
C
L
= 1.151
C
D
= 0.664
= 30
o
, = 1
= 180
o
q = 0.092
Figure 18: Flow pattern for the cavitating at plate at = 1, = 30
o
and = 180
o
.
Another form of the force coecient is
C
F
=
2
v
l
_
1 + e
i
Im(res) + i res
_
. (37)
Flow pattern for the cavitating at plate at = 1 and = 30
o
is shown in gure 18 along with hydrodynamic
coecients and position of stagnation points O and E. The direction of re-entrant jet is chosen to be = 180
o
.
3.3. Riabouchinsky model: symmetrical plate termination
The model introduced by D. Riabouchinsky [19] assumes the ow region to be symmetric and so the cavity
terminates on the symmetrical plate. Another version of the scheme was proposed [21] with central symmetry,
see gure 19, which is more convenient from the viewpoint of mathematical analysis. Adopting this scheme,
transform ow region into the rectangular /2 ||/2, where is purely imaginary, on the auxiliary u-plane,
see gure 19.
y
A
B
D
z
r
D
A O B
A
||
2
0 a /2
r
r r r
r r
u
Figure 19: Flow pattern (z-plane) and auxiliary u-plane for the cavitating at plate, Riabouchinsky scheme.
10-17
Conjugate velocity dw/dz has constant absolute value v
0
of both vertical sides of the rectangular, while on
the horizontal sides its argument is a step function with a jump-like behaviour in stagnation points O and O
(argument varies by ). That is why dw/dz has zeros at points u = a and u = a + /2. Using Schwarz
principle of symmetry, one arrives at the conclusion that dw/dz is a doubly periodic elliptic function with
periods and . Basing on the Liouville theorem and accepting notation of Whittaker & Watson [25] one can
write down such a functions as a ratio of elliptic theta-function
i
, i = 1, . . . , 4 which nome 0 < q < 1 is real.
Function dw/du is real on horizontal sides of the rectangular and must be purely imaginary on vertical sides.
That is why this derivative is also a doubly periodic elliptic function with periods and . The point D
at innity becomes the rectangular center u = /4 + /4 where dw/du has a second order pole. Stagnation
points generates simple zeros and so do points where conformality condition does not satised, that is all the
rectangle vertexes.
-0.2
0
0.2
0.4
0.6
0.8
-1 -0.5 0 0.5 1 1.5
A
B
O
A
C
L
= 1.116
C
D
= 0.644
= 30
o
, = 1
Figure 20: Flow pattern for the cavitating at plate at = 1, = 30
o
.
The solution to the problem is as follows
dw
dz
= v
0
e
i()
1
(u a)
3
(u +a)
1
(u +a)
3
(u a)
.
dw
du
= N
1
(2u)
2
3
(2u)
1
(u a)
1
(u +a)
3
(u a)
3
(u +a) .
(38)
wherefrom
z(u) =
N
v
0
e
i()
u
_
0
1
(2u)
2
1
(u +a)
2
3
(u a)
2
3
(2u)
du . (39)
An advantage of the model proposed is that it always involves less number of unknown parameters then the other
schemes. Indeed, one has to determine just three unknowns a, and N in the problem under consideration
instead of 5 6 in other cases. Two former out of three conditions (32) give the nonlinear system of three
equations in three unknowns, where u
= /4 + /4, the latter condition (32) being satised due to the
central symmetry of the ow region.
Force coecient and ow pattern are calculated using expressions (33) and (39) correspondingly. Figure 20
illustrates some numerical results obtained in Mathematica package for the same set of the ow parameters
which was considered in the previous sections.
3.4. Tulin model: double spiral vortex termination
The scheme was proposed by M. Tulin [23] and involves two double spiral-like streamlines at the trailing edge
of the cavity. Such a double spiral vortex ow is known to be a unique opportunity to conjugate smoothly two
streamlines with dierent absolute velocity values [1], see gure 21. The scheme is appeared to be especially
ecient for conned streamline problems with one/two free surfaces which bounded the ow region [14, 22].
10-18
Figure 21: Flow pattern in the vicinity of a double spiral streamline, from [1].
In the case of the cavitating at plate, rst quadrant of auxiliary u-plane is chosen as image of the region
occupied by the uid in z-plane, see gure 22. The wake behind the cavity begins at points C and E and thins
continuously in the downstream direction.
Using Chaplygin method of singular points one obtains that function dw/du is real on -axis and purely
imaginary on -axis. It has zeros at stagnation point O (u = a) and at point A where conformality condition
does not satised and three-order pole at point at innity D (u = i).
x
y
A
B
D
z
D
C
E
z
v
0
v
r
r
B O A
D
B
a
0
i
u
ic
id
r
r
C
E
Figure 22: Flow pattern (z-plane) and auxiliary u-plane for the cavitating at plate, Tulin scheme.
Another derivative dw/dz has a zero at stagnation point O and behaves in a special manner at points C and E.
Consider a function
_
dw
dz
_
i
= e
+i log v
which is a step function on -axis. Tracing small semi-circles described about points C (u = ic and E (u = id) in
the counter-clockwise direction, one arrives at the conclusion that the argument of the function has an increment
(1/)(log(v
0
/v
) and (1/)(log(v
/v
0
) correspondingly. That is why
dw
dz
= v
0
e
i()
u a
u +a
_
u ic
u + ic
u + id
u id
_
dw
du
= N
u(u
2
a
2
)
(u
2
+ 1)
3
,
(40)
where
=
i
log
v
v
0
and
z(u) =
u
_
0
dz
dw
dw
du
du =
N
v
0
e
i()
u
_
0
u(u +a)
2
(u
2
+ 1)
3
_
u + ic
u ic
u id
u + id
_
du .
10-19
The problem involves four unknown parameters a, c, d and N. On the other hand, just two direct conditions
can be imposed:
dw
dz
(u
) = v
and z
B
= z() = le
i()
. (41)
Cavity closure condition applied in the previous sections
_
u
dz
du
du = 0
does not satised.
Thus this scheme is appeared to be the most indeterminate cavity closure model. Nevertheless, two additional
conditions should be formulated:
C
=
E
and
d
d
=1
= 0 (42)
to close the problem. The former implies the velocity potential to be the same at the end of the cavity at
upper and lower boundaries. The latter species the angle (direction of the velocity vector) along the wake
boundaries be minimal at point D. Note that both conditions are arbitrarily chosen and can be substituted by
a pair of others, for instance y
C
= y
E
and d
2
w/d
2
= 0 as = 1.
Numerical results obtained with use of conditions (41) and (42) are shown in gure 23.
-0.2
0
0.2
0.4
0.6
0.8
-1 -0.5 0 0.5 1 1.5
A
B
O
C
L
= 1.116
C
D
= 0.644
= 30
o
, = 1
Figure 23: Flow pattern for the cavitating at plate at = 1, = 30
o
.
3.5. ZhukovskyEpplerRoshko model: horizontal plates termination
The model is often called open one and assumes that free streamlines conjugate smoothly with two solid semi-
innite plates which are parallel to the inow. The absolute velocity value monotonically decreases from v
0
down to v
along this plate. This cavity closure model is very eective for streamline problems either under
gravity or with one/two solid boundaries [7]. Zhukovsky [26] was the rst to introduce the model.
Following to Chaplygin method, transform ow region into the rectangular /2 ||/2, where is purely
imaginary, on the auxiliary u-plane, see gure 24. Determining zeros and poles, one arrives at the following
solution to the problem
dw
dz
= v
0
e
i()
1
(u a)
1
(u +a)
;
dw
du
= N
1
(2u)
1
(u a)
1
(u +a)
3
4
(u b)
3
4
(u +b)
,
(43)
wherefrom
z(u) =
N
v
0
e
i()
u
_
0
1
(2u)
2
1
(u +a)
3
4
(u b)
3
4
(u +b)
du . (44)
10-20
x
y
A
B
D
z
O
C
E D
D
A O B
C D E
||
2
0
a /2
s
s s s
s s
u
b +
2
Figure 24: Flow pattern (z-plane) and auxiliary u-plane for the cavitating at plate, ZhukovskyRoshkoEppler
scheme.
-0.2
0
0.2
0.4
0.6
0.8
-1 -0.5 0 0.5 1 1.5
A
B
O
C D
E D
C
L
= 1.142
C
D
= 0.659
= 30
o
, = 1
Figure 25: Flow pattern for the cavitating at plate at = 1, = 30
o
.
First two out of three conditions (32) where u
= b +/2, along with two additional conditions
dw
dz
_
2
+
2
_
= v
and
_
dw
dz
_
u
(u
) = 0
allow four unknowns a, b, and N to be derived. The former of the additional conditions implies that the
semi-innite plates are horizontal and the latter specify the velocity absolute value be a monotone decreasing
function having its minimum at point D (u = u
).
The corresponding ow pattern and hydrodynamic coecients are shown in gure 25. Note that this open cavity
closure scheme give signicantly smaller cavity length than so called closed models, such as Riabouchinsky,
TulinTerentev, EfrosKreiselGilbarg. As a result, the hydrodynamic coecients become somewhat larger.
4. Free and solid boundaries
All the previous section has demonstrated an eectiveness of Chaplygin method of singular points applied to
nonlinear cavitating problems of theory of jets in an ideal uid. This section contains another documentation
of the fact dealing with two somewhat more complicated problems: rst one being that of the ow past a
cavitating at plate in the channel and second one cavitating plate in the uniform jet of nite width. It was
shown by Terentev [21] that ZhukovskyRoshko and Tulin (double spiral vortex) schemes are to be used for the
problems. We shall not dwell on the solution procedure and just describe the nal results and some limiting
cases.
10-21
4.1. Cavitating plate in a channel
The ow pattern z = x + iy and the auxiliary u-plane are depicted in gure 26. Given are the following
parameters: angle of attack , plate length l, channel width H, cavitation number and a distance between
the lower wall of the channel and point A (trailing edge of the plate). It is also assumed that velocity v
1
at
points D
1
and D
3
is the same (though it is an unknown value).
x
y
A
B
O
C
E
D
2
D
2
D
3
D
3
D
1
D
1
h
3
h
1
h
v
1
v
0
A O B
C D
1 E
||
2
0
a /2
s
s s s
s s
u
d
1
+
2
D
2
D
3
s s
d
2
+
2
d
3
+
2
Figure 26: Flow pattern (z-plane) and auxiliary u-plane for the cavitating at plate in the channel.
Figure 27: Some special cases of the problem for the cavitating plate in the channel.
The analytical solution to the problem is readily given by Chaplygin method [22]:
dw
dz
= v
0
e
i()
1
(u a)
1
(u +a)
;
dw
du
= N
1
(2u)
1
(u a)
1
(u +a)
3
i=1
4
(u d
i
)
4
(u +b
i
)
,
(45)
wherefrom
z(u) =
N
v
0
e
i()
u
_
0
1
(2u)
2
1
(u +a)
3
i=1
4
(u d
i
)
4
(u +b
i
)
du . (46)
Unknown parameters of the problem a, b
1
, b
2
, b
3
, N, q, velocity v
1
, widths h
1
and h
3
are derived from a quite
complicated system of transcendental equations obtained on the base of the following conditions
dw
dz
(u
) = v
;
dw
dz
(u
1
) = v
1
;
dw
dz
(u
2
) = v
1
; Hv
= v
1
(h
1
+h
3
) ; z
B
= z() = le
i()
;
1
2
_
u
dw
du
du = iv
H ;
1
2
_
u1
dw
du
du = iv
1
h
1
;
dw
dz
_
2
+
2
_
= v
0
; Imz
E
= i(h
1
h) ,
(47)
10-22
where u
= u
2
= d
2
+/2, u
i
= d
i
+/2, i = 1, 3.
After some algebra the number of unknowns (and equations) can be reduced from nine down to six and even
to four, but the system remains complicated.
The general problem has lots of interesting special cases as h
1
or h
3
tends to innity (one solid wall), d
1
= 0
and d
3
= /2 (Kirchho scheme in the channel, when point C coincides with D
3
and E with D
1
), etc., see
gure 27.
4.1. Cavitating plate in a jet of nite width
The ow region and the corresponding auxiliary u-plane are shown in gure 28. Tulin cavity closure model with
double spiral vortex is adopted for it seems to be the most ecient from the mathematical viewpoint. The jet
width is assumed to be H and submergence of the plate is h. Actually submergence is a distance between a
dividing streamline and the upper jet boundary far upstream. The velocity on the jet boundary is v
x
y
A
B
D
z
C
D
z
v
0
v
q
v
E
E
G
G
F
F
r
r
B O A
G
B
a
0
i
u
ic
id
r
r
C
D
ie
if
r
r
E
F
Figure 28: Flow pattern (z-plane) and auxiliary u-plane for the cavitating at plate in the jet of nite width.
If one choses a rst quadrant of the auxiliary u-plane as an image of the ow region, then solution to the problem
is found through Chaplygin method in the form:
dw
dz
= v
0
e
i()
u a
u +a
_
u ic
u + ic
u + id
u id
_
;
dw
du
= N
u(u
2
a
2
)
(u
2
+ 1)(u
2
+e
2
)(u
2
+f
2
)
,
(48)
where, as beforehand
=
i
log
v
v
0
and
z(u) =
u
_
0
dz
du
du =
u
_
0
dz
dw
dw
du
du .
Conditions
dw
dz
(u
) = v
; z
B
= z() = le
i()
; arg
dw
dz
(i) = arg
dw
dz
(ie) ;
w(id) = w(ic) ;
1
2
_
u
dw
du
du = iHv
;
1
2
_
ie
dw
du
du = ihv
allow the unknowns a, c, d, e, f and N/V
to be derived. Again, the third and fourth conditions (which specify
the velocity vector be of the same direction at points E and G at innity downstream and complex potential be
of the same value at the ends of the cavity C and D correspondingly) are quite articial and can be substituted
by other reasonable relationships.
10-23
-1.5
-1
-0.5
0
0.5
1
1.5
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
A
B
O
C
D C
L
= 0.605
C
D
= 0.349
= 30
o
, = 0.3
Figure 29: Flow pattern for the cavitating at plate in the jet.
Note that solution (48) produces a solution by Larock and Street [14] for the cavitating plate beneath the free
surface as its special case as H and f 1
+
. Solution for the cavitating plate in unbounded inow (40)
is also a special case if H , h and d , e 1
+
as well.
Figure 29 illustrates numerical results (ow pattern in the vicinity of the plate and hydrodynamic coecients)
obtained with use of Mathematica for the cavitating plate with a following set of given parameters: H = 2,
h = 0.75, = 30
o
, = 0.3.
5. Separated free streamline ow around a body with a curved boundary
5.1. Levi-Civita approach
Levi-Civita [15] was the rst to propose an approach to solution of the plane free surface ow problems for
obstacles of a curved topography. Such problems are signicantly more complicated than those with ow
regions bounded by polygonal segments. For the latter the imaginary part (u) of the Zhukovsky function (u)
is given on the portion of the auxiliary u-domain boundary corresponding to the straight solid walls and its real
part (velocity absolute value) is given on the other portion of the boundary. In the case of a curved obstacle
all information one possesses is just the function (z) on the wetted portion on the body (which is sometimes
also unknown) and velocity absolute value on free surfaces. The main diculty of the problem is that it is
impossible to set (u) without conformal mapping z(u), if (z) is not a step function.
Following to Levi-Civita approach, ow region z is transformed into the semi-circle in auxiliary u-plane (one
can also chose another domain as well) and Levi-Civita function (15) is written down in the form
LC
=
0
+ ,
where
0
denotes Levi-Civita function for a polygonal body. Additional term is
(u) =
k=n
A
k
u
k
,
where A
k
are real coecients to be found from the imposed conditions including Brillouin one (smooth detach-
ment condition).
Brodetsky [3] calculated a ow around a circular and elliptic cylinder for = 0, three coecients A
k
being
taken into account. In the case of circular cylinder the relationship holds
d
ds
= ,
where s denotes an arc coordinate of the body boundary and is its curvature. Collocation method can be
used to derive the coecients A
k
. Signicantly more detailed numerical analysis of the problem was done in [7]
by Terentev and Dmitrieva for an arbitrary cavitation number , more than 30 terms being taken into account.
Two points were determined satisfying the Brillouin condition. The points correspond to two maxima on curves
C
x
versus detachment angle for a given , see gure 30.
10-24
Figure 30: Drag coecient of a circular cylinder versus detachment angle , from [7].
5.2. Method of integral equation
This method is an adaptation of mixed boundary value problem method (see section 2.3) to ow around an
obstacle of a curved topography. By a conformal mapping of the ow region into the semi-plane (or semi-circle,
etc.), the solution to the problem is reduced to an integral (or integro-dierential) equation of Villat type [24]
for a function (u) characterizing the angle made by the uid velocity vector. Using another form of such an
integral equation, Nekrasov [18] was the rst to prove both existence and uniqueness of ows around a small
circular arc.
Consider the method applied to a free streamline problem for an arched contour, see gure 31, and transform
the region in z plane occupied by the uid into the upper semi-plane , see gure 8.
x
y
A
0
z
O
B
q
v
C
C
C
Figure 31: Flow pattern for the cavitating arc contour at zero cavitation number.
Then, again,
dw
d
= N , (49)
where N is a real parameter to be determined and the mixed boundary value problem for Levi-Civita func-
10-25
tion (15) arising in -plane:
= 0 as 1 and b
() =
_
_
_
() , as 1 0 ;
() , as 0 b .
where b is a coordinate (to be determined) of image of point B in -plane and () is the body angle at
point = , relationship (s) being given, where s is an arc coordinate of the contour, s = 0 at point A and
s = S at point B.
The KeldyshSedov formula gives the solution to this problem in the 0 0 class
LC
() =
1
_
( + 1)( b)
_
_
_
b
_
1
(t)
_
(1 +t)(b t)
dt
t
+
b
_
0
_
(1 +t)(b t)
dt
t
_
_
_
which exists if and only if
b
_
1
(t)dt
_
(1 +t)(b t)
+
2
arcsin
1 b
1 +b
= 0 . ()
It is seen that
= arctan
_
dy/ds
dx/ds
_
This equation can be used in conjunction with the equality
dz
ds
= exp(i )
to give
s() =
z
_
0
exp(i ) dz =
N
v
_
1
exp {i(t)} exp {i
LC
(t)} t dt .
Substituting the solution for
LC
into this equation nally gives
s() =
N
v
_
1
G(t, b) dt , (50)
where
G(t, b) =
2
_
b(1 +t)(b t) +t(b 1) + 2b
1 +b
exp
_
_
_
_
(1 + t)(b t)
v.p.
b
_
1
(t)
_
(1 +t)(b t)
dt
t
_
_
_
This integral equation along with relation () and an obvious condition
s(b) = S
allows unknown parameters b, N and function () to be determined.
5.3. Arbitrary 2D supercavitating hydrofoil: analytical solution
Both the Levi-Civita and integral equation methods are known to connect with signicant diculties while
considering a ow past an obstacle with a boundary of large curvature . At the same time, hydrofoils have
such a region in the vicinity of the leading edge. One can nd some theoretical analysis of the nonlinear problems
of an arbitrary supercavitating hydrofoil and numerical results as well in [9, 4].
That is why an approach proposed by Maklakov [16] for arbitrary cavitating hydrofoil, see gure 32, is of interest
as an improvement of Levi-Civita method.
10-26
Figure 32: Flow region around a cavitating hydrofoil (TulinTerentev cavity closure scheme).
Figure 33: Auxiliary -plane for cavitating hydrofoil.
Consider a cavitating hydrofoil which boundary is given by relation = F(s), where s arc coordinate (s = 0
at point A) and is the tangential angle to the foil. TulinTerentev cavity closure scheme with a single spiral
vortex model of cavity termination is adopted (subsection 3.1). Following to Maklakov, transform ow region z
into the upper semi-circle |t| 1, Im 0 on auxiliary plane t = + i, see gure 33. Stagnation point O
corresponds to t
0
= exp(i
0
), point C to the origin of the coordinate system in t-plane and point at innity D
has the image at t
= r
exp(i
).
Chaplygin method of singular points gives the derivative
dw
dt
= kv
0
f(t) =
kv
0
r
t(t
2
1)(t
2
2t cos
0
+ 1)
(t t
)
2
(t t
)
2
(t 1/t
)
2
(t 1/t
)
2
, (51)
where k is a real parameter to be determined.
Levi-Civita function is
LC
(t) =
0
(t) +M
t
2
1
t
+ (t) , (52)
where M denotes a real constant,
0
(t) is Levi-Civita function for a at plate at zero cavitation number
0
(t) =
0
+ i log
t exp(i
0
)
1 t exp(i
0
)
,
and (t) is analytic and continuous function in upper semi-circle. That is why conformal mapping can be
written as
z(t) =
t
_
1
dz
dw
dw
dt
dt =
t
_
1
exp
_
i
0
(t) + i M
t
2
1
t
+ i(t)
_
f(t) dt .
Levi-Civita method requires the expansion
(t) =
k=1
A
k
t
k
,
10-27
where A
k
are real coecients to be found. Maklakov [16] proposed another representation of . If
(e
i
) = () + i ()
then Schwarz formula for a circle gives a relation between and its real part given on the semi-circle boundary
(t) =
1 t
2
_
0
() d
1 2t cos +t
2
.
Imaginary part of (t) is
() = C =
1
2
_
0
_
() ()
_
_
cot
+
2
cot
2
_
d .
0.25 0.5 0.75
0
0.25
x
y
A
a)
0 1 2
100
0
100
o
s
b)
Figure 34: Zhukovsky hydrofoil (a) and relation = F(s).
Using expression ds/d = |dz/dt| and conformal mapping z(t) write down the relation between arc coordinate s
and polar angle :
s() = k
_
0
g() exp
_
C 2M sin
_
d ,
where
g() = 4 sin (1 cos( +
0
))
1
(1 +r
2
2r
cos(
))
2
1
(1 +r
2
2r
cos( +
))
2
.
It is easy to see that =
0
and therefore, nally, one arrives at the following integral equation
() =
0
+F
_
_
k
_
0
g() exp
_
C 2M sin
_
d
_
_
(53)
Five unknown parameters k, M,
0
, r
are derived from the conditions
_
t
dz
dt
dt = 0 ,
dw
dz
(t
) = v
, s(1) = S ,
10-28
Figure 35: Drag coecient C
D
versus wetted length S.
Figure 36: Lift coecient C
L
versus wetted length S.
where S denotes the whole (given) wetted length of the hydrofoil. The latter condition can be substituted by
Brillouin condition at point B which specify the curvature of the cavity and hydrofoil be the same at detachment
point B (t = 1). It was demonstrated [1] that this condition is equivalent to
(1) = 0 which yields [16]
tan
0
2
+
_
0
() tan
2
d = 2M .
Naturally, in this case the wetted length S is unknown because z-coordinates of point B are unknown as well.
Some numerical results for a supercavitating Zhukovsky hydrofoil are shown in gures 3436. Zhukovsky
hydrofoil of unit chord length is chosen to have maximum thickness 11.82%, perimeter P = 2.053 and curvature
radius at the leading edge = 0.016, see gure 34, where the foil geometry and relation = F(s) for the
tangential angle to the foil versus arc coordinate s are shown. Figures 35 and 36 demonstrate drag and lift
coecient versus wetted length S (Brilllouin condition is not imposed) in the case of angle of attack = 5
o
for
a set of cavitation number = 0, 0.1, 0.15, 0.3 and 0.5 (curves 1 corresponds to = 0). It was found that
drag (lift) coecient attains its maximum (minimum) value at points where Brilllouin condition was satised.
10-29
Conclusion
A brief review of the main theoretical approaches to problems of the theory of jets in an ideal uid was conveyed,
including hodograph (Kirchho and Zhukovsky) methods, Chaplygin method of singular points, mixed boundary
value problem method, some modications of Levi-Civita approach and method of integral equations. Every
analytical solution is illustrated by numerical results, including ow patterns.
References
[1] Birkhoff G. & Zarantonello E.H. 1957 Jets, wakes and cavities. Academic Press, New York.
[2] Brillouin M. Les surfaces de glissement de Helmholtz et la resistance des uides. Annual chemie et phys.,
vol. 23.
[3] Brodetsky S. 1923 Discounituous uid motion past circular and elliptic cylinders. Proc. Royal Soc.
London, S.A., vol. CII, No. A718.
[4] Furuya O. 1975 Nonlinear calculation of arbitrary shaped supercavitating hydrofoils near a free surface.
J. Fluid Mech., 68, 2140.
[5] Gilbarg D. 1960 Jets and Cavities. Handbuch der Physik, vol. 9, SpringerVerlag, 311 p.
[6] Gurevich M.I. 1965 Theory of jets in an Ideal uid, Academic Press, New York.
[7] Gurevich M.I. 1979 Theory of jets in an Ideal uid, Nauka Publishing, Moscow, 2-nd edition, (in Russian).
[8] Helmholtz H. 1868 Ueber discontinuirliche Fl ussigkeitsbewegungen. Monastber, Kongl. Akad. Wissen-
scheften, 215, Berlin.
[9] Ivanov A.N. 1979 Hydrodynamics of Supercavitating Flows. Sudostroenie Publ., Leningrad, USSR (in
Russian).
[10] Keldysh M.V. & Sedov L.I. 1937 An eective solution to some boundary problems for harmonic func-
tions. Dokladi Akademii Nauk SSSR, vol. XVI, No. 1.
[11] King A.C. & Bloor M.I.G. 1990 Free streamline ow over curved topography. Quarterly of Applied
Mathematics, vol. XLVII, pp. 281293.
[12] Kirchhoff G. 1869 Zur Theorie freier Fl ussigkeitsstrahlen. Borchardts Journal, Bd. 70, 289.
[13] K onhauser P. 1984 Berechnung zweidimensionaler Totwasserstromungen um vorgegeben Konturen. Dis-
sertation Institut A f ur Mechanik der Universit at Stuttgart.
[14] Larock B.E. & Street R.L. 1967 Cambered bodies in cavitating ow a nonlinear analysis and design
procedure. J. Ship Research, 12 (1), pp. 131139.
[15] Levi-Civita T. 1907 Scie e leggi de resistenza. Rend. Circolo Math. Palermo, vol. XXIII.
[16] Maklakov D.V. 1997 Nonlinear problems of potential ows with unknown boundaries. Yanus-K Publish-
ing, Moscow (in Russian).
[17] Muskhelishvili N.I. 1946 Singular integral equations. P. Noordho Ltd. Publ., Gr oningen, Holland.
[18] N.A. Nekrasov 1922 Sur la mouvement discontinu a deux dimensions de uid autour dun obstacle en
form darc de cercle. Publ. Plytechnical Institute of IvanovoVoznesensk (in Russian).
[19] Riabouchinsky D. 1920 On steady uid motion with free surfaces. Proceedings of London Mathematical
Society, vol. 19, ser. 2.
[20] Terentev A.G. 1976 On nonlinear theory of cavitating ows. Izvestia AN SSSR, Mekhanika zhidkosti i
gaza, vol. 1, pp. 158161.
[21] Terentev A.G. 1981 Mathematical problems of cavitation. Chuvash University Publishing, Cheboksary
(in Russian).
10-30
[22] Terentev A.G. & Lazarev V.A. 1969 Cavitating plate in a conned ow. In book Fizikotekhnicheskie
problemy, Chuvash University Publishing, Cheboksary (in Russian).
[23] Tulin M.P. 1964 Supercavitating ows small perturbation theory. J. Ship Res., 7 (3), 1637.
[24] Villat H. 1911 Sur la resistance des uides. Ann. Sci. Ecole Normal Superior, vol. 28 (3).
[25] Whittaker E.T. & Watson G.N. 1940 A course of modern analysis. 4-th edition, Cambridge University
Press.
[26] Zhukovsky N.E. 1890 An improvement of Kirchho method for determining the uid motion in two
dimensions for a constant speed given on unknown streamline. Matematichesky sbornik, vol. XV (in Rus-
sian).
10-31
This page has been deliberately left blank
Page intentionnellement blanche
Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Calculating The Inverse Z-TransformDokument10 SeitenCalculating The Inverse Z-TransformJPR EEENoch keine Bewertungen
- Totally Convex AlgebrasDokument31 SeitenTotally Convex AlgebrasOmaguNoch keine Bewertungen
- Summative Assessment 7.1.2Dokument4 SeitenSummative Assessment 7.1.2Hunop Chs100% (1)
- Math 9 1st Summative Test FinalDokument5 SeitenMath 9 1st Summative Test FinalMariel PastoleroNoch keine Bewertungen
- Mathematics SSC 1 Paper IIDokument16 SeitenMathematics SSC 1 Paper IIKumail LakraNoch keine Bewertungen
- 3001 Solution Ch3Dokument9 Seiten3001 Solution Ch3Ryan NgNoch keine Bewertungen
- Plato Practice Test 9th Grade JanDokument14 SeitenPlato Practice Test 9th Grade JanJacqueline TurciosNoch keine Bewertungen
- Geometrical Significance of X Coordinate, Y Coordinate, and Z Coordinate in SpaceDokument11 SeitenGeometrical Significance of X Coordinate, Y Coordinate, and Z Coordinate in SpaceHridyanshu Singh RoyNoch keine Bewertungen
- Math 10 q1 WK 8 Module 8 Polynomial EquationsDokument32 SeitenMath 10 q1 WK 8 Module 8 Polynomial EquationsClarissa FanilagNoch keine Bewertungen
- Bow Mathematics 7-10...Dokument37 SeitenBow Mathematics 7-10...era resusNoch keine Bewertungen
- New Zealand Mathematical Olympiad Commitee January SolutionsDokument1 SeiteNew Zealand Mathematical Olympiad Commitee January SolutionsRajiv KabadNoch keine Bewertungen
- 2019 JC1 H2 Math Anglo Chinese Junior CollegeDokument10 Seiten2019 JC1 H2 Math Anglo Chinese Junior CollegeCamellia HiltonNoch keine Bewertungen
- Matrices RotationsDokument10 SeitenMatrices RotationsBlackopsNoch keine Bewertungen
- MATH1.001 - Calculus I - Chapter 2 (Handout)Dokument66 SeitenMATH1.001 - Calculus I - Chapter 2 (Handout)Lê Thanh HằngNoch keine Bewertungen
- Grade 8 Math 2nd Q ActivitiesDokument2 SeitenGrade 8 Math 2nd Q ActivitiesMar Yel GriñoNoch keine Bewertungen
- Problem Set - Sequences and SumsDokument2 SeitenProblem Set - Sequences and SumsjohnNoch keine Bewertungen
- CBSE Class 10 Maths Sample Paper Set 1 PDFDokument8 SeitenCBSE Class 10 Maths Sample Paper Set 1 PDFMITHU RUDHUNoch keine Bewertungen
- Quiz 2Dokument6 SeitenQuiz 2dharmendra_kanthariaNoch keine Bewertungen
- IF2017Dokument4 SeitenIF2017drssagrawalNoch keine Bewertungen
- 9.3 Notes-AnswersDokument5 Seiten9.3 Notes-AnswersFausto SosaNoch keine Bewertungen
- 7.4 Operational Properties IIDokument8 Seiten7.4 Operational Properties IIFatimah Nik MazlanNoch keine Bewertungen
- MA108 ODE: Second Order Linear ODE's: Niranjan Balachandran IIT BombayDokument29 SeitenMA108 ODE: Second Order Linear ODE's: Niranjan Balachandran IIT BombayKing of KingsNoch keine Bewertungen
- Lessons 22-45Dokument179 SeitenLessons 22-45Shakeel NawazNoch keine Bewertungen
- Lesson 6: Functions of One and More VariablesDokument3 SeitenLesson 6: Functions of One and More VariablesBotnaru LaurentiuNoch keine Bewertungen
- Sample: !!CAUTION!! This Is Only A Sample PaperDokument15 SeitenSample: !!CAUTION!! This Is Only A Sample PaperDian Ayu UtamiNoch keine Bewertungen
- Cambridge IGCSE™: Mathematics 0580/43 May/June 2022Dokument11 SeitenCambridge IGCSE™: Mathematics 0580/43 May/June 2022hildebrandokNoch keine Bewertungen
- ReadmeDokument1 SeiteReadmekulim123Noch keine Bewertungen
- Dingle Morgan0Dokument17 SeitenDingle Morgan0Ciprian ComanNoch keine Bewertungen
- Basic Algebra Bridge CourseDokument24 SeitenBasic Algebra Bridge CourseongcristoffNoch keine Bewertungen
- Anino, Bonono, Yunzal Math100 Prelim M1 L2 For UploadingDokument16 SeitenAnino, Bonono, Yunzal Math100 Prelim M1 L2 For UploadingPhilip CabaribanNoch keine Bewertungen