Das könnte Ihnen auch gefallen
- Atlas Copco - Curso Aire AcondicionadoDokument57 SeitenAtlas Copco - Curso Aire Acondicionadosalvador341100% (1)
- Convertidor de TorqueDokument27 SeitenConvertidor de Torquesalvador3410% (1)
- Guatematica 1 - Tema 9 - Suma y RestaDokument31 SeitenGuatematica 1 - Tema 9 - Suma y RestaRomy SalcedoNoch keine Bewertungen
- Material Estudiante Divisor de TorqueDokument15 SeitenMaterial Estudiante Divisor de Torquesalvador3410% (1)
- Gatling Pea PVZ Papertoy MIPDokument3 SeitenGatling Pea PVZ Papertoy MIPsalvador34133% (3)
- Ingles-Español - Diccionario TécnicoDokument170 SeitenIngles-Español - Diccionario Técnicosalvador341Noch keine Bewertungen
- Trabajo MicroondasDokument111 SeitenTrabajo Microondassalvador341Noch keine Bewertungen
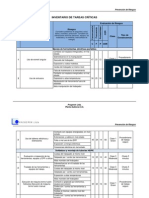
- INVENTARIO DE TAREAS CRÍTICA FinalDokument7 SeitenINVENTARIO DE TAREAS CRÍTICA Finalsalvador341100% (1)
- Hidráulica AvanzadaDokument104 SeitenHidráulica Avanzadasalvador34194% (31)
- Holgura de ValvulasDokument5 SeitenHolgura de ValvulasAnonymous NBbgrya0100% (1)
- Factor de AmortiguamientoDokument7 SeitenFactor de AmortiguamientoArturoo RoojasNoch keine Bewertungen
- Buses Datos y Bus Dir Calcula Tamaño MemoriaDokument10 SeitenBuses Datos y Bus Dir Calcula Tamaño MemoriacarlosNoch keine Bewertungen
- Actividad 2. Diodos y Sus UsosDokument15 SeitenActividad 2. Diodos y Sus Usosjuan ramirezNoch keine Bewertungen
- Bioinstrumentacion Reporte 3Dokument4 SeitenBioinstrumentacion Reporte 3mxj09Noch keine Bewertungen
- Guía IARU Reg 1 CastellanoDokument100 SeitenGuía IARU Reg 1 CastellanoCésar PazNoch keine Bewertungen
- Convertidor CACA Basado DSP JAVR PDFDokument118 SeitenConvertidor CACA Basado DSP JAVR PDFledesma_93Noch keine Bewertungen
- 3-Tipos de Antenas PDFDokument24 Seiten3-Tipos de Antenas PDFtopbedrtNoch keine Bewertungen
- Teorema de Thevenin y NortonDokument13 SeitenTeorema de Thevenin y NortonMaría Alexandra Aparicio RivasNoch keine Bewertungen
- Sistema de Bombeo Velocidad VariableDokument13 SeitenSistema de Bombeo Velocidad VariableCarlos VonNoch keine Bewertungen
- EOI P3 Morejon ProcelDokument3 SeitenEOI P3 Morejon ProcelKevin MorejonNoch keine Bewertungen
- Red 5GDokument3 SeitenRed 5GJohnKreamerNoch keine Bewertungen
- Control EjerDokument5 SeitenControl EjerGEORGE MICHAEL NUÑEZ BACANoch keine Bewertungen
- Televisión Inteligente: Set-Top BoxDokument16 SeitenTelevisión Inteligente: Set-Top BoxJeni MartínezNoch keine Bewertungen
- Laboratorio 1Dokument6 SeitenLaboratorio 1louisNoch keine Bewertungen
- Arjes Impaktor 250 - 06 - SeguridadDokument24 SeitenArjes Impaktor 250 - 06 - SeguridadSergio UrquizoNoch keine Bewertungen
- Lista de Precio Tu Super PC Agosto 1Dokument20 SeitenLista de Precio Tu Super PC Agosto 1manuelgonzalez1984Noch keine Bewertungen
- Importación de CelularesDokument9 SeitenImportación de CelularesJERALDINE CATALINA MURCIA REALNoch keine Bewertungen
- Sci-750-760p-770d Manual (Es) (PT) 20180129 WebDokument24 SeitenSci-750-760p-770d Manual (Es) (PT) 20180129 WebElman SharifovNoch keine Bewertungen
- Actividad BiosDokument2 SeitenActividad BiosMafeNoch keine Bewertungen
- Matriz Recursos TecnologicosDokument1 SeiteMatriz Recursos TecnologicosEliodoro Pernet Ubarne100% (4)
- Proyecto Conversor Analogo DigitalDokument5 SeitenProyecto Conversor Analogo DigitalsergiopastraNoch keine Bewertungen
- Dahua IpDokument14 SeitenDahua IpNicolas RiveraNoch keine Bewertungen
- 00 - Manual Calefon Acqua F 14-17-21Dokument34 Seiten00 - Manual Calefon Acqua F 14-17-21Fernando Frias GastaldiNoch keine Bewertungen
- Satellite C45-ASP4311FL Spec SP PDFDokument4 SeitenSatellite C45-ASP4311FL Spec SP PDFLucho Cohaila GuzmanNoch keine Bewertungen
- BUI330 Kiox MY19 US Ohne - En.es PDFDokument55 SeitenBUI330 Kiox MY19 US Ohne - En.es PDFErnesto PaterninaNoch keine Bewertungen
- Uso Del OsciloscopioDokument8 SeitenUso Del OsciloscopioMaximiliano Diaz ArancibiaNoch keine Bewertungen
- Descripción SolitecDokument22 SeitenDescripción Solitecfacu_falaNoch keine Bewertungen
- Manual Del LocutorDokument4 SeitenManual Del LocutorThaly Toño Sierra VasquezNoch keine Bewertungen
- Laboratorio 6Dokument10 SeitenLaboratorio 6KarenNoch keine Bewertungen
- TPLINK AV500 GuiaDokument3 SeitenTPLINK AV500 GuiaJACINTONoch keine Bewertungen