Das könnte Ihnen auch gefallen
- Description: 2009 Dodge Journey SE 2009 Dodge Journey SEDokument312 SeitenDescription: 2009 Dodge Journey SE 2009 Dodge Journey SEChristian Martinez100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Directional Control ValvesDokument28 SeitenDirectional Control ValvesKelvin YipNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- PV776 TSP23762 1Dokument70 SeitenPV776 TSP23762 1Benjamin Miranda FloresNoch keine Bewertungen
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGVon EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNoch keine Bewertungen
- Caesar II Applications GuideDokument308 SeitenCaesar II Applications Guidebanjinolimit8299100% (5)
- Design Practice For General Piping DesignDokument28 SeitenDesign Practice For General Piping DesignAnanto Yusuf WNoch keine Bewertungen
- MODULE 5 Pneumatic Control Circuits PDFDokument108 SeitenMODULE 5 Pneumatic Control Circuits PDFchandrashekar m100% (1)
- The Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementVon EverandThe Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementNoch keine Bewertungen
- Pneumatic Lab ReportDokument9 SeitenPneumatic Lab ReportAsyraf Yusoff71% (7)
- Basic Pneumatic Examen PDFDokument34 SeitenBasic Pneumatic Examen PDFRosalino Leonides Martinez Marquez100% (1)
- JKM Pneumatic CIRCUIT SystemDokument50 SeitenJKM Pneumatic CIRCUIT SystembeselamuNoch keine Bewertungen
- Exercise 13: Conveyor Belt: 1: Problem DescriptionDokument10 SeitenExercise 13: Conveyor Belt: 1: Problem DescriptionyashveerluvNoch keine Bewertungen
- Bean Size - Plug & Cage ChokeDokument5 SeitenBean Size - Plug & Cage ChokeNoircheval100% (2)
- Service Manual: F2 SeriesDokument36 SeitenService Manual: F2 SeriesPramono DamarNoch keine Bewertungen
- Arcelor - Catalog Cu Palplanse Metalice - 1 PDFDokument80 SeitenArcelor - Catalog Cu Palplanse Metalice - 1 PDFVG_victo100% (1)
- Module 3: Electropneumatics: Relay Control SystemDokument36 SeitenModule 3: Electropneumatics: Relay Control Systemanon_444174592Noch keine Bewertungen
- Plumbing & Fire Fighting Design & Construction - IPC & NFPA - Online Training CourseDokument10 SeitenPlumbing & Fire Fighting Design & Construction - IPC & NFPA - Online Training CourseNexus Inspectorate Private LimitedNoch keine Bewertungen
- Pneumatic Circuit DesignDokument17 SeitenPneumatic Circuit DesignSriram SastryNoch keine Bewertungen
- Electrohydraulic Actuators SKD.. enDokument32 SeitenElectrohydraulic Actuators SKD.. enfahd alawadhiNoch keine Bewertungen
- C2 - RevADokument16 SeitenC2 - RevAChirag ShahNoch keine Bewertungen
- Problems of Pneumatic Circuit DesignDokument13 SeitenProblems of Pneumatic Circuit Designvijay75% (4)
- TUTORIAL 2-NewDokument17 SeitenTUTORIAL 2-NewGeetha Sai KumarNoch keine Bewertungen
- C 1Dokument30 SeitenC 1stoleha100% (1)
- Pneumatics ProblemsDokument22 SeitenPneumatics ProblemsMatthew Laureano ResurreccionNoch keine Bewertungen
- A 6Dokument14 SeitenA 6stolehaNoch keine Bewertungen
- 4..circuits Design (Slides)Dokument48 Seiten4..circuits Design (Slides)ESLAM salahNoch keine Bewertungen
- Clamping Camera HousingDokument4 SeitenClamping Camera HousingNitin BuZz67% (3)
- EE18603 UNIT2 Part3 Pneumatic Circuit Design ClassicalmethodDokument53 SeitenEE18603 UNIT2 Part3 Pneumatic Circuit Design ClassicalmethodTHAMIZMANI S EEENoch keine Bewertungen
- Lecture 39 PDFDokument23 SeitenLecture 39 PDFmyusuf_engineerNoch keine Bewertungen
- V2 EXP2 Logic Valve and Sequence Control For Multiple Cylinder OperationDokument12 SeitenV2 EXP2 Logic Valve and Sequence Control For Multiple Cylinder OperationJane Ruby GonzalesNoch keine Bewertungen
- Partial Automation of An Internal Grinder: TP101 Festo DidacticDokument9 SeitenPartial Automation of An Internal Grinder: TP101 Festo DidacticKalana RanmalNoch keine Bewertungen
- PNEUMATICS Final ProjectDokument8 SeitenPNEUMATICS Final ProjectJeet ManesNoch keine Bewertungen
- V2 EXP2 Logic Valve and Sequence Control For Multiple Cylinder OperationDokument12 SeitenV2 EXP2 Logic Valve and Sequence Control For Multiple Cylinder OperationGeetha Sai KumarNoch keine Bewertungen
- Pneumatic Note UNIT 4Dokument12 SeitenPneumatic Note UNIT 4Syazrin Aklili Ab RahmanNoch keine Bewertungen
- Caso de EstudioDokument7 SeitenCaso de EstudioLuis AlexanderNoch keine Bewertungen
- Lecture - 16 - System - Design - Dev - Pneumatics and Hydraulics - Part5 - FinalDokument39 SeitenLecture - 16 - System - Design - Dev - Pneumatics and Hydraulics - Part5 - FinalRadwa MagdyNoch keine Bewertungen
- Sequencing of CylindresDokument5 SeitenSequencing of CylindreschtganduNoch keine Bewertungen
- Chapter 4Dokument24 SeitenChapter 4Razan Al AzzamNoch keine Bewertungen
- SDP Course MaterialDokument61 SeitenSDP Course Materialnikhilv90Noch keine Bewertungen
- Exercise 19 - Drilling Machine With Gravity Feed Magazine: 1. Abbreviated Notation 1A+ 2A+ 2A-1A - 3A+ 3ADokument5 SeitenExercise 19 - Drilling Machine With Gravity Feed Magazine: 1. Abbreviated Notation 1A+ 2A+ 2A-1A - 3A+ 3AyashveerluvNoch keine Bewertungen
- Advanced - Mechatronics Task InformationDokument3 SeitenAdvanced - Mechatronics Task InformationDianaMariskaNoch keine Bewertungen
- Input Station For Laser Cutter: TP101 Festo DidacticDokument13 SeitenInput Station For Laser Cutter: TP101 Festo Didacticsudesh_bhugaloo0% (1)
- PN 2100Dokument89 SeitenPN 2100cresjohnNoch keine Bewertungen
- Final Report: Sanchit Aggarwal ID No. 2012A4PS260G Dr. Sachin WaigaonkarDokument18 SeitenFinal Report: Sanchit Aggarwal ID No. 2012A4PS260G Dr. Sachin WaigaonkarSanchit AgarwalNoch keine Bewertungen
- Pneumatic Practice IV (Displacement-Dependent Control of A Double-Acting CylinderDokument4 SeitenPneumatic Practice IV (Displacement-Dependent Control of A Double-Acting CylinderF1011 MUHD NAJWAN MASRINoch keine Bewertungen
- Pneumatic Control and AutomationDokument21 SeitenPneumatic Control and AutomationMahendra SutarNoch keine Bewertungen
- Práctica GrafcetDokument11 SeitenPráctica GrafcetJaimeNoch keine Bewertungen
- Pneumatics ManualDokument19 SeitenPneumatics ManualAditya PratapNoch keine Bewertungen
- Directional Control Valves: Chapter B-4Dokument24 SeitenDirectional Control Valves: Chapter B-4stolehaNoch keine Bewertungen
- Electro-Hydraulic Actuators For Valves: Acvatix™Dokument31 SeitenElectro-Hydraulic Actuators For Valves: Acvatix™Imre NadjNoch keine Bewertungen
- annotated-LBYME4B EF2 Group204 Pneumatics2Dokument11 Seitenannotated-LBYME4B EF2 Group204 Pneumatics2catalan153709Noch keine Bewertungen
- Module 5 NotesDokument9 SeitenModule 5 NotesShashank ShastriNoch keine Bewertungen
- Pneumatics and EPneumatic Results and DiscussionDokument6 SeitenPneumatics and EPneumatic Results and DiscussionSyafiq SulaimanNoch keine Bewertungen
- Lab No 3 - Pressure Dependent Control and Time-Delay ValveDokument5 SeitenLab No 3 - Pressure Dependent Control and Time-Delay ValveMuhammad RafayNoch keine Bewertungen
- 005 Joystick 2Dokument8 Seiten005 Joystick 2JonathanDavidDeLosSantosAdornoNoch keine Bewertungen
- PN CircuitsDokument7 SeitenPN CircuitsJap IbeNoch keine Bewertungen
- LAB5 TransferStation PDFDokument10 SeitenLAB5 TransferStation PDFمبنيةنميب نتمبيةنNoch keine Bewertungen
- Maroti Kalganche 1904061Dokument5 SeitenMaroti Kalganche 1904061069-Arjun KharatNoch keine Bewertungen
- Mec2407: Electromechanics Fluid Power System - Pneumatic SystemDokument12 SeitenMec2407: Electromechanics Fluid Power System - Pneumatic SystemEdwin Jesu DassNoch keine Bewertungen
- Controlling of Pneumatic CylindersDokument3 SeitenControlling of Pneumatic Cylindersاحمد السيدNoch keine Bewertungen
- Lecture 13Dokument36 SeitenLecture 13salem bahsanNoch keine Bewertungen
- Chapter 5-Pneumatic System - Multi Actuator Circuit (Version 3)Dokument50 SeitenChapter 5-Pneumatic System - Multi Actuator Circuit (Version 3)Renz TyNoch keine Bewertungen
- ACM103 Central Switchbox Description22Dokument41 SeitenACM103 Central Switchbox Description22basem elhosanyNoch keine Bewertungen
- Automation Lab ManualDokument99 SeitenAutomation Lab Manualmanikandan_murugaiahNoch keine Bewertungen
- Ash Handling System Operetaion and Maintenance InstructionDokument162 SeitenAsh Handling System Operetaion and Maintenance InstructionHari PrasadNoch keine Bewertungen
- Soalan Lab Pneumatik 1Dokument6 SeitenSoalan Lab Pneumatik 1Kubheran SelvathuraiNoch keine Bewertungen
- Pneumatics Group 3Dokument8 SeitenPneumatics Group 3Maricel O GagalangNoch keine Bewertungen
- VibroflotationDokument3 SeitenVibroflotationEldhose JacobNoch keine Bewertungen
- E3120.07vratex - Pvcexcon 3F30 PG62 V07V20 As Ar Fa FR AtexDokument1 SeiteE3120.07vratex - Pvcexcon 3F30 PG62 V07V20 As Ar Fa FR AtexCustomer ServiceNoch keine Bewertungen
- Contourline / Pureline Warming Drawer: 8 Shown Above: Esw 6114Dokument5 SeitenContourline / Pureline Warming Drawer: 8 Shown Above: Esw 6114junjaxNoch keine Bewertungen
- CARRIER Chart PDFDokument1 SeiteCARRIER Chart PDFacmm59383Noch keine Bewertungen
- The Griffith Relation - A Historical Review: by Dietrich Munz and Theo FettDokument28 SeitenThe Griffith Relation - A Historical Review: by Dietrich Munz and Theo FettV.v. TaguisNoch keine Bewertungen
- P3E Choke: Valve SpecificationsDokument4 SeitenP3E Choke: Valve SpecificationsJairo andres Guarnizo SuarezNoch keine Bewertungen
- Analysis and Design of Prestressed Deck Slab Bridge With IRC 112-2011Dokument6 SeitenAnalysis and Design of Prestressed Deck Slab Bridge With IRC 112-2011Anonymous b9fkTYfEoRNoch keine Bewertungen
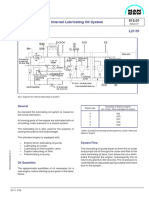
- Internal Lubricating Oil System: GeneralDokument3 SeitenInternal Lubricating Oil System: GeneralAtanasio PerezNoch keine Bewertungen
- Optimization of Recirculating Laminar Air FlowDokument6 SeitenOptimization of Recirculating Laminar Air FlowreiferNoch keine Bewertungen
- Punching Shear PDFDokument13 SeitenPunching Shear PDFmohamedadel100Noch keine Bewertungen
- Natural Convection Heat Transfer in Horizonal Cylindrical Cavities (ASME)Dokument4 SeitenNatural Convection Heat Transfer in Horizonal Cylindrical Cavities (ASME)jmpandolfiNoch keine Bewertungen
- Gen 00 104265 Qa 6050 00514 0000 03 PDFDokument11 SeitenGen 00 104265 Qa 6050 00514 0000 03 PDFchandana kumarNoch keine Bewertungen
- Kunci Jawaban Basic Ac MaterialDokument5 SeitenKunci Jawaban Basic Ac Materialdyan dyanNoch keine Bewertungen
- Machining and Machine Tool Operation PI GATE 2020 Previous Year With Ans KeyDokument21 SeitenMachining and Machine Tool Operation PI GATE 2020 Previous Year With Ans Keyhyper meshNoch keine Bewertungen
- Major Project ReportDokument58 SeitenMajor Project ReportHIMANSHU GANWANINoch keine Bewertungen
- 5114 21 03.kitDokument3 Seiten5114 21 03.kitTimon2005Noch keine Bewertungen
- MIP BOHLER DrysystemDokument8 SeitenMIP BOHLER DrysystemKarthi KeyanNoch keine Bewertungen
- 08y PDFDokument306 Seiten08y PDFFilmorePainNoch keine Bewertungen
- Strength of Material Chapter 3Dokument22 SeitenStrength of Material Chapter 3naserunnNoch keine Bewertungen
- Clutch Gp-TransmissionDokument10 SeitenClutch Gp-TransmissionLucas EduardoNoch keine Bewertungen