Das könnte Ihnen auch gefallen
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Analysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementDokument9 SeitenAnalysis and Assessment of STATCOM-based Damping Stabilizers For Power System Stability EnhancementabubakarNoch keine Bewertungen
- IEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerDokument7 SeitenIEEE Power System Paper-Analysis of Power System Linearized Model With STATCOM Based Damping StabilizerAnoop MathewNoch keine Bewertungen
- Impact of STATCOM and SSSC Based Compensation On Transmission Line ProtectionDokument6 SeitenImpact of STATCOM and SSSC Based Compensation On Transmission Line ProtectionjonnadulaNoch keine Bewertungen
- Stability Enhancement in HVDC System With STATCOM: Chan-Ki Kim, Jin-Young Kim, Sung-Doo Lee, Eung-Bo SimDokument10 SeitenStability Enhancement in HVDC System With STATCOM: Chan-Ki Kim, Jin-Young Kim, Sung-Doo Lee, Eung-Bo Simbaskaranjay5502Noch keine Bewertungen
- A Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridDokument4 SeitenA Novel Facts Compensation Scheme For Power Quality Improvement in Wind Smart GridbarneypseNoch keine Bewertungen
- Performance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerDokument4 SeitenPerformance Comparison Between SVC and STATCOM For Reactive Power Compensation by Using Fuzzy Logic ControllerShiva PaddamNoch keine Bewertungen
- Transient Stability Investigations of The Wind-Diesel Hybrid PowerDokument21 SeitenTransient Stability Investigations of The Wind-Diesel Hybrid Powerrasim_m1146Noch keine Bewertungen
- Cascaded Control of A Multilevel STATCOM For Reactive Power CompensationDokument13 SeitenCascaded Control of A Multilevel STATCOM For Reactive Power CompensationSudheer KethamreddyNoch keine Bewertungen
- An Optimal Location of A Capacitive Reactance Compensator in Electric Power SystemsDokument7 SeitenAn Optimal Location of A Capacitive Reactance Compensator in Electric Power SystemsТимур ХусбановичьNoch keine Bewertungen
- Optimal Placement of STATCOM in Power SystemsDokument4 SeitenOptimal Placement of STATCOM in Power SystemsWARSE JournalsNoch keine Bewertungen
- Dynamic Coordination Strategies Between HVDC and STATCOM: Chan-Ki Kim, Vijay Sood, and Seok-Jin LeeDokument11 SeitenDynamic Coordination Strategies Between HVDC and STATCOM: Chan-Ki Kim, Vijay Sood, and Seok-Jin LeeArmand NicheuNoch keine Bewertungen
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDokument7 SeitenModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNoch keine Bewertungen
- Global Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCDokument18 SeitenGlobal Voltage Stability Analysis of A Power System Using Network Equivalencing Technique in The Presence of TCSCblaagicaNoch keine Bewertungen
- Algorithm Allocation: System Security Improvement Differential EvolutionDokument6 SeitenAlgorithm Allocation: System Security Improvement Differential EvolutionPiyush AgnihotriNoch keine Bewertungen
- A Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersDokument10 SeitenA Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersAJER JOURNALNoch keine Bewertungen
- Design of A Fuzzy Logic Controller Based STATCOM For IEEEDokument6 SeitenDesign of A Fuzzy Logic Controller Based STATCOM For IEEEharini shivNoch keine Bewertungen
- 2 Ares - 1502.00215ggDokument6 Seiten2 Ares - 1502.00215ggMatheus MaiaNoch keine Bewertungen
- Transient Modelling of STATCOMDokument6 SeitenTransient Modelling of STATCOMSwechhya kafleNoch keine Bewertungen
- Shunt Compensation For Power Quality Improvement Using A Statcom ControllerDokument5 SeitenShunt Compensation For Power Quality Improvement Using A Statcom ControllericaroigorNoch keine Bewertungen
- Psat Wind FactDokument6 SeitenPsat Wind FactSandeep KumarNoch keine Bewertungen
- Dstatcom BessDokument7 SeitenDstatcom BessSYAHRUN MUBAROKNoch keine Bewertungen
- Transient Stability Improvement Using Upfc and SVCDokument8 SeitenTransient Stability Improvement Using Upfc and SVCSai Bhargav VeerabathiniNoch keine Bewertungen
- Application of HSA and GA in Optimal Placement of FACTS Devices Considering Voltage Stability and LossesDokument7 SeitenApplication of HSA and GA in Optimal Placement of FACTS Devices Considering Voltage Stability and LossesAbdulrazzaq F. AttoNoch keine Bewertungen
- Simulation of D-Q Control System For A Unified Power Flow ControllerDokument10 SeitenSimulation of D-Q Control System For A Unified Power Flow ControllerSyed Faizan AliNoch keine Bewertungen
- Dynamic Model For Power Systems With Multiple FACTS ControllersDokument11 SeitenDynamic Model For Power Systems With Multiple FACTS ControllersSyed Wajahat AliNoch keine Bewertungen
- Model-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsDokument11 SeitenModel-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsMaroju Santosh KiranNoch keine Bewertungen
- Comparing Impact of STATCOM and SSSC On The Performance of Digital Distance RelayDokument7 SeitenComparing Impact of STATCOM and SSSC On The Performance of Digital Distance RelayJimmy Alexander BarusNoch keine Bewertungen
- Custom9 PDFDokument7 SeitenCustom9 PDFVenkat SubramanianNoch keine Bewertungen
- Ijest11 03 08 291Dokument11 SeitenIjest11 03 08 291Izzat KamarudinNoch keine Bewertungen
- Research Article: Mitigation of Voltage Dip and Voltage Flickering by Multilevel D-STATCOMDokument11 SeitenResearch Article: Mitigation of Voltage Dip and Voltage Flickering by Multilevel D-STATCOMAhmed Mohamed HassanNoch keine Bewertungen
- Reducing Source Current Harmonics Due To Balanced and Un-Balanced Voltage Variation With Fuzzy Controlled D-StatcomDokument14 SeitenReducing Source Current Harmonics Due To Balanced and Un-Balanced Voltage Variation With Fuzzy Controlled D-StatcomJames MorenoNoch keine Bewertungen
- A Cascaded Converter-Based Statcom With Energy StorageDokument6 SeitenA Cascaded Converter-Based Statcom With Energy Storageamayac814Noch keine Bewertungen
- Power Quality Improvement of Grid Interconnected 3-Phase 4-Wire Distribution System Using Fuzzy Logic ControlDokument5 SeitenPower Quality Improvement of Grid Interconnected 3-Phase 4-Wire Distribution System Using Fuzzy Logic ControlJeyanthi GanesanNoch keine Bewertungen
- Design, Testing, and Analysis of STATCOM and TCSC For Real-Time SimulationDokument19 SeitenDesign, Testing, and Analysis of STATCOM and TCSC For Real-Time Simulationtien chau minhNoch keine Bewertungen
- Optimal Location and Reactive Power Injection of WDokument8 SeitenOptimal Location and Reactive Power Injection of WAzuan Abdul RazakNoch keine Bewertungen
- Power System Dynamic Performance With STATCOM Controller: Mfareed@kfupm - Edu.sa Ahrahim@kfupm - Edu.saDokument5 SeitenPower System Dynamic Performance With STATCOM Controller: Mfareed@kfupm - Edu.sa Ahrahim@kfupm - Edu.sapragatinareshNoch keine Bewertungen
- An Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageDokument10 SeitenAn Adaptive Power Oscillation Damping Controllerby STATCOM With Energy StorageChristian EmenikeNoch keine Bewertungen
- MainDokument6 SeitenMainRaviraj KumbharNoch keine Bewertungen
- Indirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewDokument4 SeitenIndirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewRavinder RangaNoch keine Bewertungen
- A Novel Feedback Linearizing Statcom Controller For Power System DampingDokument11 SeitenA Novel Feedback Linearizing Statcom Controller For Power System DampingHalim TlemçaniNoch keine Bewertungen
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Dokument8 SeitenIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNoch keine Bewertungen
- Ijreee 2013Dokument9 SeitenIjreee 2013kiranNoch keine Bewertungen
- 1 PBDokument9 Seiten1 PBRithveen Reddy GaddamNoch keine Bewertungen
- Tarun MittalDokument11 SeitenTarun MittalER Publications, IndiaNoch keine Bewertungen
- Fuzzy Logic Based Supervision of DC Link PI Control in A D-StatcomDokument8 SeitenFuzzy Logic Based Supervision of DC Link PI Control in A D-StatcomtheijesNoch keine Bewertungen
- A Novel Approach To Optimal Allocation of SVC Using Genetic Algorithms and Continuation Power FlowDokument5 SeitenA Novel Approach To Optimal Allocation of SVC Using Genetic Algorithms and Continuation Power FlowMadalena TrindadeNoch keine Bewertungen
- Kart HiDokument11 SeitenKart HiSivas SubramaniyanNoch keine Bewertungen
- Enhancement of Power System Dynamics Using A Novel Series Compensation SchemeDokument7 SeitenEnhancement of Power System Dynamics Using A Novel Series Compensation SchemeIJMERNoch keine Bewertungen
- Effect of STATCOM - ES On Distance Relay Operation in A Series Compensated SystemDokument8 SeitenEffect of STATCOM - ES On Distance Relay Operation in A Series Compensated SystemMoataz JabarNoch keine Bewertungen
- Modeling and Control of DC-DC Boost Converter Using K-Factor Control For MPPT of Solar PV SystemDokument6 SeitenModeling and Control of DC-DC Boost Converter Using K-Factor Control For MPPT of Solar PV SystemHoang ManhNoch keine Bewertungen
- keywords" content="call for paper 2012, hard copy of journal, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, IJERD, journal of science and technology, how to get a research paper published, publishing a paper, publishing of journal, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, Computer Science journal, how to submit your paper, peer reviw journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, hard copy of journal,Dokument8 Seitenkeywords" content="call for paper 2012, hard copy of journal, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, IJERD, journal of science and technology, how to get a research paper published, publishing a paper, publishing of journal, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, Computer Science journal, how to submit your paper, peer reviw journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, hard copy of journal,IJERDNoch keine Bewertungen
- Electrical Power and Energy SystemsDokument8 SeitenElectrical Power and Energy SystemsYoussef MajdoubNoch keine Bewertungen
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDokument8 SeitenImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanNoch keine Bewertungen
- Predictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsDokument6 SeitenPredictive Current Control of A Back-to-Back NPC Wind Energy Conversion System To Meet Low Voltage Ride-Through RequirementsjimylihNoch keine Bewertungen
- Paper 3Dokument6 SeitenPaper 3Aadit JeyasankarNoch keine Bewertungen
- Stabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomDokument5 SeitenStabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomAmit DebnathNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBewertung: 2 von 5 Sternen2/5 (1)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- 5-35 KV CablesDokument16 Seiten5-35 KV CablessirageldeenNoch keine Bewertungen
- Electrical Machines and EquipmentDokument76 SeitenElectrical Machines and EquipmentsirageldeenNoch keine Bewertungen
- 11 KV, Feeder, With, Statcom, ProjectDokument102 Seiten11 KV, Feeder, With, Statcom, ProjectsirageldeenNoch keine Bewertungen
- Power Quality Improvement by Using DSTATCOMDokument12 SeitenPower Quality Improvement by Using DSTATCOMsirageldeenNoch keine Bewertungen
- Agenda StatcomDokument61 SeitenAgenda StatcomsirageldeenNoch keine Bewertungen
- 02 Earthing SystemsDokument113 Seiten02 Earthing SystemsRameez ZafarNoch keine Bewertungen
- Power Quality Improvement by Using DSTATCOMDokument12 SeitenPower Quality Improvement by Using DSTATCOMsirageldeenNoch keine Bewertungen
- 4 LCD+TV+Service+Guide+Handbook ENGDokument61 Seiten4 LCD+TV+Service+Guide+Handbook ENGJorge Fernando de TivantaNoch keine Bewertungen
- 11 - 00HV Disconnecting Switches, Power Fuses, Air Load Break Switches, Instrument TransformersDokument55 Seiten11 - 00HV Disconnecting Switches, Power Fuses, Air Load Break Switches, Instrument TransformersHopNoch keine Bewertungen
- Operating Manual: Signal Converter SSI - Analog / SerialDokument30 SeitenOperating Manual: Signal Converter SSI - Analog / SerialDiana MIND AmayaNoch keine Bewertungen
- TR 2 TremoloDokument1 SeiteTR 2 TremoloFouquetNoch keine Bewertungen
- Optical Sensor Product Guide-LrDokument60 SeitenOptical Sensor Product Guide-LrLaurentiu IacobNoch keine Bewertungen
- S3 KTU-Solid State Devices Module 1Dokument15 SeitenS3 KTU-Solid State Devices Module 1nadheera ayisha67% (3)
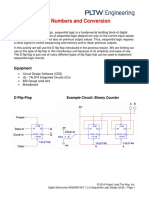
- 1.2.4.AK SequentialLogicDesign - Counters - DLBDokument7 Seiten1.2.4.AK SequentialLogicDesign - Counters - DLBSean MonahanNoch keine Bewertungen
- DemandaDokument1.038 SeitenDemandaNARONoch keine Bewertungen
- PWM Inverters With Common DC-DC Converter Supply: Stepped Wave Synthesis From Pre-ProgrammedDokument7 SeitenPWM Inverters With Common DC-DC Converter Supply: Stepped Wave Synthesis From Pre-ProgrammedSumit HarwaniNoch keine Bewertungen
- Ece-V-Information Theory & Coding (10ec55) - AssignmentDokument10 SeitenEce-V-Information Theory & Coding (10ec55) - AssignmentLavanya Vaishnavi D.A.Noch keine Bewertungen
- Advanced Mobile Communications Chapter1Dokument18 SeitenAdvanced Mobile Communications Chapter1Kondapalli LathiefNoch keine Bewertungen
- 7080 HandbookDokument139 Seiten7080 Handbookdony prabuNoch keine Bewertungen
- PHY547 - LAb Manual-2019Dokument26 SeitenPHY547 - LAb Manual-2019zulhaimirasheedNoch keine Bewertungen
- LogDokument3.202 SeitenLogriezl santosNoch keine Bewertungen
- 3 Phase Synchronous-Rectified Buck Contronller For Next Genenration CPU Core PowerDokument16 Seiten3 Phase Synchronous-Rectified Buck Contronller For Next Genenration CPU Core Powerpisquan8Noch keine Bewertungen
- Week 5 GP2Dokument5 SeitenWeek 5 GP2Marvin DamascoNoch keine Bewertungen
- Module 2 Notes - PSOCDokument24 SeitenModule 2 Notes - PSOCpriyaNoch keine Bewertungen
- Lightning Protection Using Lfa-MDokument20 SeitenLightning Protection Using Lfa-McheguweraNoch keine Bewertungen
- 3 Periodical Test in Science V: Councilor Nicolas Dais Elementary SchoolDokument6 Seiten3 Periodical Test in Science V: Councilor Nicolas Dais Elementary SchoolRed MariposaNoch keine Bewertungen
- dct4 Operator CodesDokument14 Seitendct4 Operator Codesapi-26122926Noch keine Bewertungen
- Ground Noise Isolation AmplifierDokument11 SeitenGround Noise Isolation AmplifierOmar FloresNoch keine Bewertungen
- Mosfet & Igbt: Ee3147 Power ElectronicsDokument16 SeitenMosfet & Igbt: Ee3147 Power ElectronicsHoàng TúNoch keine Bewertungen
- Dla-Aioxl11400s Datasheet Enus t7642332427Dokument4 SeitenDla-Aioxl11400s Datasheet Enus t7642332427Yosi DarmawansyahNoch keine Bewertungen
- Basic Passive RC FiltersDokument44 SeitenBasic Passive RC FiltersJohnPJojoNoch keine Bewertungen
- Closed and Open LoopDokument23 SeitenClosed and Open LoopsaraneeeNoch keine Bewertungen
- Cascade Control SE665Dokument20 SeitenCascade Control SE665NurulFarihahMohdZulkefleNoch keine Bewertungen
- The Electric Motor IIDokument6 SeitenThe Electric Motor IIGray Fox GarcíaNoch keine Bewertungen
- Mantenimiento y Operacion Asfatladora Dynapac f121 CDokument268 SeitenMantenimiento y Operacion Asfatladora Dynapac f121 CRobinson Guaneme100% (2)
- Visual Testing Topical Outline: FundamentalsDokument2 SeitenVisual Testing Topical Outline: FundamentalsGaurav ChopraNoch keine Bewertungen
- Alcatel 1000 Softswitch E10 Software Release 26Dokument2 SeitenAlcatel 1000 Softswitch E10 Software Release 26Jeff PowellNoch keine Bewertungen