Das könnte Ihnen auch gefallen
- Internet Phone Services Simplified (VoIP)Dokument176 SeitenInternet Phone Services Simplified (VoIP)sumanth83137Noch keine Bewertungen
- A-level Physics Revision: Cheeky Revision ShortcutsVon EverandA-level Physics Revision: Cheeky Revision ShortcutsBewertung: 3 von 5 Sternen3/5 (10)
- USA v. Sussmann - Durham Filing - Motion On Potential Conflicts of InterestDokument13 SeitenUSA v. Sussmann - Durham Filing - Motion On Potential Conflicts of InterestWashington Examiner100% (3)
- Crane Loads N Wharf StructureDokument77 SeitenCrane Loads N Wharf StructureMichael Dixon100% (1)
- CHAIN CalculationDokument18 SeitenCHAIN CalculationDmitrijs MuhinsNoch keine Bewertungen
- Rotordynamics TutorialDokument59 SeitenRotordynamics TutorialAmbrish SinghNoch keine Bewertungen
- Dana Drive ShaftDokument32 SeitenDana Drive Shaftsskumar79Noch keine Bewertungen
- Motor Selection CalculatorDokument5 SeitenMotor Selection Calculatorjay100% (5)
- Bollard Pull CalculationsDokument7 SeitenBollard Pull CalculationsᎮᏂᎩᏗᎥ ᏇᏗᎥ ᏗᏬᏁᎶ75% (4)
- Chain Drive CalculationsDokument42 SeitenChain Drive CalculationsAchin67% (3)
- Selecting A Belt Slide: Technical InformationDokument3 SeitenSelecting A Belt Slide: Technical InformationawemetalNoch keine Bewertungen
- Indiabulls PILDokument64 SeitenIndiabulls PILPGurus100% (1)
- Power Press Design, BrakesDokument9 SeitenPower Press Design, Brakeszeynell70100% (2)
- Section16 - Motor Selection and SizingDokument5 SeitenSection16 - Motor Selection and Sizinganon_152069291100% (1)
- Guid For The Selection of Agitator, Design Formula and Scale UpDokument60 SeitenGuid For The Selection of Agitator, Design Formula and Scale Upscranderi100% (1)
- Type SAP Usage / Definition Example Procurement RotablesDokument4 SeitenType SAP Usage / Definition Example Procurement Rotablessabya1411Noch keine Bewertungen
- Lecture On Vehicle StructureDokument64 SeitenLecture On Vehicle StructureAvinash KumarNoch keine Bewertungen
- Calculation of Torque For Selection of MotorDokument6 SeitenCalculation of Torque For Selection of Motoratanughosh125100% (6)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlVon EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlBewertung: 5 von 5 Sternen5/5 (1)
- Motor Selection, Inertia PDFDokument6 SeitenMotor Selection, Inertia PDFIswar Rauf Aboo 'AqilahNoch keine Bewertungen
- Crane Load-Chemical Storage ShelterDokument44 SeitenCrane Load-Chemical Storage ShelterAndreas HendiNoch keine Bewertungen
- Screw Jack CalculationsDokument6 SeitenScrew Jack CalculationsDaniel SherwinNoch keine Bewertungen
- 007 G.R. No. 162523 November 25, 2009 Norton Vs All Asia BankDokument5 Seiten007 G.R. No. 162523 November 25, 2009 Norton Vs All Asia BankrodolfoverdidajrNoch keine Bewertungen
- Miscellaneous Calculations: 1 Sea Transport Forces On CargoDokument4 SeitenMiscellaneous Calculations: 1 Sea Transport Forces On CargoAgarry EmmanuelNoch keine Bewertungen
- Ball Screw Selection ExerciseDokument7 SeitenBall Screw Selection ExercisemaddyaugNoch keine Bewertungen
- Hydro Electric Project-Basic Layout For Francis, As Per Is, USBR and Other StandardsDokument15 SeitenHydro Electric Project-Basic Layout For Francis, As Per Is, USBR and Other Standardsबिपन गुलेरियाNoch keine Bewertungen
- Crane Loads & Wharf Structure DesignDokument79 SeitenCrane Loads & Wharf Structure DesignSatanapong ChantanakomNoch keine Bewertungen
- Oriental Motor Motor Sizing CalculationsDokument10 SeitenOriental Motor Motor Sizing CalculationsKha VeenNoch keine Bewertungen
- ABSTRACT (CG To Epichlorohydrin)Dokument5 SeitenABSTRACT (CG To Epichlorohydrin)Amiel DionisioNoch keine Bewertungen
- Note de Calcul Mécanique Convoyeur OCPDokument11 SeitenNote de Calcul Mécanique Convoyeur OCPAkram FerchichiNoch keine Bewertungen
- Martin Sprocket CalculationDokument3 SeitenMartin Sprocket CalculationKiran Kumar K T100% (1)
- Direct Drive and Servo MotorsDokument8 SeitenDirect Drive and Servo MotorsChandaKundaNoch keine Bewertungen
- 25.rotary Actuator CalculationDokument12 Seiten25.rotary Actuator Calculationcarthik_babu100% (1)
- Caculate Rotary LinearDokument3 SeitenCaculate Rotary LinearTrinh Luong MienNoch keine Bewertungen
- An Serv 002 PDFDokument20 SeitenAn Serv 002 PDFMario TapiaNoch keine Bewertungen
- Fms200806 Timing Belts Calc Methods 202 enDokument28 SeitenFms200806 Timing Belts Calc Methods 202 enbrviraniNoch keine Bewertungen
- 202-Fms Timing Belts Calc Methods enDokument28 Seiten202-Fms Timing Belts Calc Methods enYesenia AquilinaNoch keine Bewertungen
- Servo Motor SelectionDokument11 SeitenServo Motor Selectionanandparasu100% (1)
- Shaft DesignDokument5 SeitenShaft Designtsega melkeNoch keine Bewertungen
- PND1000-3 Technical DataDokument10 SeitenPND1000-3 Technical DataPartsGopher.comNoch keine Bewertungen
- Wheel DynamicsDokument8 SeitenWheel Dynamicslog46sriNoch keine Bewertungen
- Motor Specifications and Ratings Mhma: 500W To 1.5kW High Inertia, Medium CapacityDokument6 SeitenMotor Specifications and Ratings Mhma: 500W To 1.5kW High Inertia, Medium CapacitynvkjayanthNoch keine Bewertungen
- FORMATO MATPR EES 8-PagDokument8 SeitenFORMATO MATPR EES 8-Pagarlette caizaNoch keine Bewertungen
- Ac DrivesDokument36 SeitenAc DrivesSeshagirirao GalamNoch keine Bewertungen
- LNMDokument2 SeitenLNMAmirudin Suryo AtmojoNoch keine Bewertungen
- Ads RackselDokument4 SeitenAds Rackselmaruc08Noch keine Bewertungen
- Steering Subsystem CalculationsDokument12 SeitenSteering Subsystem CalculationsAbinandan PNoch keine Bewertungen
- Selection PaP1 1Dokument32 SeitenSelection PaP1 1RofochoNoch keine Bewertungen
- Torque Sensors: Common Sensing MethodsDokument32 SeitenTorque Sensors: Common Sensing MethodsvishiwizardNoch keine Bewertungen
- (1. Earthquake Analysis Results Per ASCE 7Dokument20 Seiten(1. Earthquake Analysis Results Per ASCE 7ankitNoch keine Bewertungen
- #2Dokument18 Seiten#2tsegaye2321Noch keine Bewertungen
- MD Handb2 Belt CalcDokument5 SeitenMD Handb2 Belt Calcoana2507Noch keine Bewertungen
- Exam Possible Questions: Velocity at HDokument31 SeitenExam Possible Questions: Velocity at HJake FryNoch keine Bewertungen
- Optimal Finite-Burn Interplanetary Injection From Earth Orbit (Fortran)Dokument20 SeitenOptimal Finite-Burn Interplanetary Injection From Earth Orbit (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- Mathcad - GeneralDokument17 SeitenMathcad - Generalapi-232034744Noch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Robot Manipulators: Modeling, Performance Analysis and ControlVon EverandRobot Manipulators: Modeling, Performance Analysis and ControlNoch keine Bewertungen
- LS7183 / LS7184: Encoder To Counter Interface ChipsDokument3 SeitenLS7183 / LS7184: Encoder To Counter Interface ChipsAgim ZilkicNoch keine Bewertungen
- Algorithms and Programming IDokument102 SeitenAlgorithms and Programming IGaurav UmarNoch keine Bewertungen
- Ukrainian Ministry of Education and ScienceDokument1 SeiteUkrainian Ministry of Education and ScienceJelena BauerNoch keine Bewertungen
- WWW Siliconinvestor ComDokument2 SeitenWWW Siliconinvestor ComJelena BauerNoch keine Bewertungen
- Engineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsDokument8 SeitenEngineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsJelena BauerNoch keine Bewertungen
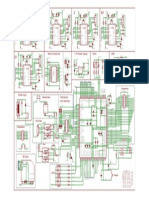
- 4pi SchematicDokument1 Seite4pi SchematicJelena BauerNoch keine Bewertungen
- Are ValoDokument4 SeitenAre ValoJelena BauerNoch keine Bewertungen
- Specification For Wrought Austenitic Stainless Steel Piping FittingsDokument10 SeitenSpecification For Wrought Austenitic Stainless Steel Piping FittingsAnilNoch keine Bewertungen
- SK Memorandum of AgreementDokument3 SeitenSK Memorandum of AgreementNORZEN LAGURANoch keine Bewertungen
- Is LNG Still Competitive With Other Liquid Fuels?: Proceedings, Ascope'97 ConferenceDokument18 SeitenIs LNG Still Competitive With Other Liquid Fuels?: Proceedings, Ascope'97 Conferencemanolo8catalanNoch keine Bewertungen
- Iata 2008 - Annex ADokument11 SeitenIata 2008 - Annex Agurungbhim100% (1)
- PneumaxDokument2 SeitenPneumaxandresNoch keine Bewertungen
- METHODOLOG1Dokument3 SeitenMETHODOLOG1Essa M RoshanNoch keine Bewertungen
- 24 Antiseizure DrugsDokument71 Seiten24 Antiseizure DrugsThea MallariNoch keine Bewertungen
- Lateral Pile Paper - Rev01Dokument6 SeitenLateral Pile Paper - Rev01YibinGongNoch keine Bewertungen
- GX Deloitte 2017 TMT PredictionsDokument60 SeitenGX Deloitte 2017 TMT PredictionsMontevideo PortalNoch keine Bewertungen
- ''Adhibeo'' in LatinDokument5 Seiten''Adhibeo'' in LatinThriw100% (1)
- File 1379580604 PDFDokument9 SeitenFile 1379580604 PDFMuhammad Salik TaimuriNoch keine Bewertungen
- DLL Health 10 Q1-W7Dokument8 SeitenDLL Health 10 Q1-W7Robert ManiboNoch keine Bewertungen
- UTAR Convocation Checklist For Graduands Attending Convocation (March 2019) - 1Dokument5 SeitenUTAR Convocation Checklist For Graduands Attending Convocation (March 2019) - 1JoyleeeeeNoch keine Bewertungen
- 17 Farley Fulache Vs ABS-CBN G.R. No. 183810Dokument7 Seiten17 Farley Fulache Vs ABS-CBN G.R. No. 183810SDN HelplineNoch keine Bewertungen
- Slates Cembrit Berona 600x300 Datasheet SirDokument2 SeitenSlates Cembrit Berona 600x300 Datasheet SirJNoch keine Bewertungen
- Create New Project CodeVision AVR (LED)Dokument5 SeitenCreate New Project CodeVision AVR (LED)calvinNoch keine Bewertungen
- Casio Aq140w UputstvoDokument1 SeiteCasio Aq140w UputstvoalazovicNoch keine Bewertungen
- A Cost Estimation Approach For IoT Projects PDFDokument9 SeitenA Cost Estimation Approach For IoT Projects PDFGuru VelmathiNoch keine Bewertungen
- CorpDokument14 SeitenCorpIELTSNoch keine Bewertungen
- Application Form ICDFDokument2 SeitenApplication Form ICDFmelanie100% (1)
- Accounting QuestionsDokument16 SeitenAccounting QuestionsPrachi ChananaNoch keine Bewertungen
- HVCB 0120Dokument70 SeitenHVCB 0120adeeNoch keine Bewertungen
- Sevana - Hospital Kiosk ConceptNoteDokument103 SeitenSevana - Hospital Kiosk ConceptNotemanojNoch keine Bewertungen
- CV - Oscar ChampionDokument3 SeitenCV - Oscar ChampionKarina Gamarra NinaNoch keine Bewertungen