Das könnte Ihnen auch gefallen
- 2012bukataphd PDFDokument200 Seiten2012bukataphd PDFMd Mustafa Kamal100% (1)
- Basic Instrumentation Measuring Devices and Basic Pid ControlDokument125 SeitenBasic Instrumentation Measuring Devices and Basic Pid ControlCuong Nguyen ChiNoch keine Bewertungen
- IJSC Vol2 Iss1 253 260 2 PDFDokument8 SeitenIJSC Vol2 Iss1 253 260 2 PDFMd Mustafa KamalNoch keine Bewertungen
- Help PDFDokument2 SeitenHelp PDFMd Mustafa KamalNoch keine Bewertungen
- 19Dokument42 Seiten19Bhavya SainiNoch keine Bewertungen
- Omega PID TunningDokument4 SeitenOmega PID TunningOwaisNoch keine Bewertungen
- Lars hagg2012PID PDFDokument6 SeitenLars hagg2012PID PDFMd Mustafa KamalNoch keine Bewertungen
- GA Speed Regulation of BLDCDokument6 SeitenGA Speed Regulation of BLDCdivinelightNoch keine Bewertungen
- Lecture15 PDFDokument34 SeitenLecture15 PDFMd Mustafa KamalNoch keine Bewertungen
- Best simple PID tuning rulesDokument27 SeitenBest simple PID tuning rulesstathiss11Noch keine Bewertungen
- Up ReportDokument26 SeitenUp ReportMaheshNoch keine Bewertungen
- OpticalDokument88 SeitenOpticalMd Mustafa KamalNoch keine Bewertungen
- 1 PDFDokument75 Seiten1 PDFMd Mustafa KamalNoch keine Bewertungen
- A PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorDokument5 SeitenA PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorMd Mustafa KamalNoch keine Bewertungen
- Xiachangliang 4 PDFDokument8 SeitenXiachangliang 4 PDFMd Mustafa KamalNoch keine Bewertungen
- Linux 2 Weeks Short CourseDokument2 SeitenLinux 2 Weeks Short CourseMd Mustafa KamalNoch keine Bewertungen
- TransDokument25 SeitenTransMd Mustafa KamalNoch keine Bewertungen
- Microprocessor Controlled Ac and DC DrivesDokument21 SeitenMicroprocessor Controlled Ac and DC DrivesMd Mustafa KamalNoch keine Bewertungen
- Hydro Power Plant EssentialsDokument41 SeitenHydro Power Plant EssentialsMd Mustafa Kamal100% (2)
- Microprocessor Controlled Ac and DC DrivesDokument21 SeitenMicroprocessor Controlled Ac and DC DrivesMd Mustafa KamalNoch keine Bewertungen
- Session-Animation and GraphicsDokument68 SeitenSession-Animation and GraphicsMd Mustafa KamalNoch keine Bewertungen
- Gain and Noise Figure of Erbium-Doped Fiber Amplifier (EDFADokument5 SeitenGain and Noise Figure of Erbium-Doped Fiber Amplifier (EDFAMd Mustafa KamalNoch keine Bewertungen
- Digital control of speed using SCRs and ADCDokument6 SeitenDigital control of speed using SCRs and ADCMd Mustafa KamalNoch keine Bewertungen
- The Fractional Fourier Transform and Its ApplicationsDokument26 SeitenThe Fractional Fourier Transform and Its ApplicationsCarlos Francisco HerreraNoch keine Bewertungen
- The Fractional Fourier Transform and Its ApplicationsDokument26 SeitenThe Fractional Fourier Transform and Its ApplicationsCarlos Francisco HerreraNoch keine Bewertungen
- BLDC FuzzyDokument6 SeitenBLDC FuzzyMd Mustafa KamalNoch keine Bewertungen
- Digital control of speed using SCRs and ADCDokument6 SeitenDigital control of speed using SCRs and ADCMd Mustafa KamalNoch keine Bewertungen
- Use of EDCA Access During HCF Polling: Mathilde Benveniste, Avaya LabsDokument5 SeitenUse of EDCA Access During HCF Polling: Mathilde Benveniste, Avaya LabsMd Mustafa KamalNoch keine Bewertungen
- 11 03 0293 00 000e CFB DeletionDokument3 Seiten11 03 0293 00 000e CFB DeletionMd Mustafa KamalNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Micro Shelter Product Description V5aDokument11 SeitenMicro Shelter Product Description V5aIan JaredNoch keine Bewertungen
- Lecture 1-5 Atomic and Molecular Physics by Nek M ShaikhDokument25 SeitenLecture 1-5 Atomic and Molecular Physics by Nek M Shaikh125-The Legend StarNoch keine Bewertungen
- FFA Furfural Fire and Health HazardsDokument2 SeitenFFA Furfural Fire and Health HazardsYuga Pria PungkasanNoch keine Bewertungen
- Preparation Exam API 510:N°01 QuestionsDokument3 SeitenPreparation Exam API 510:N°01 QuestionskorichiNoch keine Bewertungen
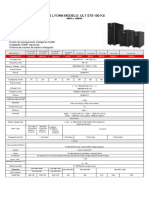
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADokument1 SeiteUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzNoch keine Bewertungen
- Reso Course PlannerDokument2 SeitenReso Course PlannerSnehasishGhosh100% (1)
- TR01B - Muhammad Aditya Prana Yoga - Analisa Listrik Chapter8.3Dokument3 SeitenTR01B - Muhammad Aditya Prana Yoga - Analisa Listrik Chapter8.3AzeedNoch keine Bewertungen
- AtmegaDokument22 SeitenAtmegaMUKILANNoch keine Bewertungen
- Quantitative Reasoning: Factors, HCF & LCM, FactorialsDokument2 SeitenQuantitative Reasoning: Factors, HCF & LCM, FactorialsNaman JainNoch keine Bewertungen
- Búsqueda Del Medio - RENR6305 - 994F Wheel Loader Power TrainDokument5 SeitenBúsqueda Del Medio - RENR6305 - 994F Wheel Loader Power TrainDavidCPNoch keine Bewertungen
- Citect V7.0 Error Codes PDFDokument13 SeitenCitect V7.0 Error Codes PDFWahyu PrakosoNoch keine Bewertungen
- Engineering Chemistry Lab Osmania UniversityDokument83 SeitenEngineering Chemistry Lab Osmania UniversityMujtaba khanNoch keine Bewertungen
- Bio PharmaceuticsDokument48 SeitenBio PharmaceuticsRajan Kashyap100% (2)
- Inverse Laplace Transformation Ex 11 2 Umer Asghar MethodDokument34 SeitenInverse Laplace Transformation Ex 11 2 Umer Asghar MethodSikandar Khan100% (1)
- 50-555circuits 2 PDFDokument102 Seiten50-555circuits 2 PDFAlfonso RamosNoch keine Bewertungen
- Reservoir Saturation ToolDokument19 SeitenReservoir Saturation ToolAli Jay JNoch keine Bewertungen
- 19Ma2Icmat Module 5 - Elementary Numerical MethodsDokument4 Seiten19Ma2Icmat Module 5 - Elementary Numerical Methods1DS19CH011 Jashwanth C RNoch keine Bewertungen
- Hydrogen in 1 ShotDokument86 SeitenHydrogen in 1 ShotSaloum Muhammed Islam0% (1)
- Materi Welding Defect IIDokument64 SeitenMateri Welding Defect IIsmartz inspectionNoch keine Bewertungen
- Grade 6 MathDokument12 SeitenGrade 6 Mathapi-264682510Noch keine Bewertungen
- Huawei E5885ls 93a Mobile Wifi DatasheetDokument22 SeitenHuawei E5885ls 93a Mobile Wifi DatasheetMohammed ShakilNoch keine Bewertungen
- DactylosDokument150 SeitenDactylosJay-r Pabualan DacoNoch keine Bewertungen
- Hkts 210 Sub/Hkts 200 Sub: SubwooferDokument6 SeitenHkts 210 Sub/Hkts 200 Sub: SubwooferDan PopNoch keine Bewertungen
- GGGDokument3 SeitenGGGAnkitNoch keine Bewertungen
- Timetable Saturday 31 Dec 2022Dokument1 SeiteTimetable Saturday 31 Dec 2022Khan AadiNoch keine Bewertungen
- G4pc50ud-Fd IgbtDokument10 SeitenG4pc50ud-Fd IgbtMiguel DuranNoch keine Bewertungen
- KUKA Sim 30 Installation enDokument49 SeitenKUKA Sim 30 Installation enRégis Naydo0% (1)
- Hassāniyya Arabic DialectDokument15 SeitenHassāniyya Arabic DialectTiddukla Tadelsant Imedyazen100% (1)
- Monitor AOC 24P3CW EnglishDokument32 SeitenMonitor AOC 24P3CW Englishflorinf_uNoch keine Bewertungen