Das könnte Ihnen auch gefallen
- EF5A HDT Infra Bijali Paani PCB7 1669801048119Dokument43 SeitenEF5A HDT Infra Bijali Paani PCB7 1669801048119Zala DivyarajsinhNoch keine Bewertungen
- The Discrete Wavelet Transform Based Iris Recognition For Eyes With Non-Cosmetic Contact LensDokument10 SeitenThe Discrete Wavelet Transform Based Iris Recognition For Eyes With Non-Cosmetic Contact LensIAES IJAINoch keine Bewertungen
- Curriculam Vitae Ms. Mercy Theresa SagayarajDokument4 SeitenCurriculam Vitae Ms. Mercy Theresa SagayarajAaron RodriguesNoch keine Bewertungen
- IoB for Improving Customer ServicesDokument4 SeitenIoB for Improving Customer ServicesHannan GharadeNoch keine Bewertungen
- Jeevan Pramaan Face App 3.6Dokument5 SeitenJeevan Pramaan Face App 3.6Akash Reddy K0% (1)
- Project WKM Copy12111Dokument67 SeitenProject WKM Copy12111Leo SaimNoch keine Bewertungen
- XG-X Series: Communications Control ManualDokument918 SeitenXG-X Series: Communications Control ManualJesus R. Bernal SalazarNoch keine Bewertungen
- Financial Competency Assessment Model 2167 0234 1000317Dokument7 SeitenFinancial Competency Assessment Model 2167 0234 1000317sabetaliNoch keine Bewertungen
- Impact of Branding On Consumer Buying Behavior20191106 47784 Omm6sc With Cover Page v2Dokument13 SeitenImpact of Branding On Consumer Buying Behavior20191106 47784 Omm6sc With Cover Page v2Việt PhạmNoch keine Bewertungen
- Ai Presentation Ceps Webinar L. Sioli 23.4.21Dokument21 SeitenAi Presentation Ceps Webinar L. Sioli 23.4.21Miguel Angel LarrinagaNoch keine Bewertungen
- Merck IndianDokument752 SeitenMerck IndianAnurag KyalNoch keine Bewertungen
- Saraswati Science College: A Project Report OnDokument6 SeitenSaraswati Science College: A Project Report Ondeepak_143Noch keine Bewertungen
- NOTES - Quality ReviewDokument4 SeitenNOTES - Quality ReviewRahul KumarNoch keine Bewertungen
- BC AssignmentDokument22 SeitenBC AssignmentAnnapurna PurohitNoch keine Bewertungen
- Deep Learning for Efficient Sign Language RecognitionDokument48 SeitenDeep Learning for Efficient Sign Language Recognitionatul pontedNoch keine Bewertungen
- Bharart Ko JanoDokument183 SeitenBharart Ko JanoAGRIM UPADHYAYNoch keine Bewertungen
- D'Iberville SidewalkPedStudy ClientReview2Dokument66 SeitenD'Iberville SidewalkPedStudy ClientReview2leslie3mitchell3robeNoch keine Bewertungen
- Compliance With: Saudi NCA-ECC Based On ISO/IEC 27001Dokument8 SeitenCompliance With: Saudi NCA-ECC Based On ISO/IEC 27001Pratik BhaleraoNoch keine Bewertungen
- CYW20721 Bluetooth Audio SolutionDokument35 SeitenCYW20721 Bluetooth Audio SolutionNguyễn Bá DũngNoch keine Bewertungen
- Fusionex ADA (Day1) v3.1 2022Dokument106 SeitenFusionex ADA (Day1) v3.1 2022izzudinrozNoch keine Bewertungen
- A.D. Pearle - Surgical Technique and Anatomic Study of Latissimus Dorsi and Teres Major Transfers (2006)Dokument9 SeitenA.D. Pearle - Surgical Technique and Anatomic Study of Latissimus Dorsi and Teres Major Transfers (2006)João Pedro ZenattoNoch keine Bewertungen
- Receipt for Reservation Fee PaymentDokument1 SeiteReceipt for Reservation Fee PaymentSk NurhasanNoch keine Bewertungen
- Madurai Kamaraj University: Capital Market Efficiency and Development of Capital Market in IndiaDokument11 SeitenMadurai Kamaraj University: Capital Market Efficiency and Development of Capital Market in Indiachanus92Noch keine Bewertungen
- Functional Organization of Motoneuron Pool and Its InputsDokument85 SeitenFunctional Organization of Motoneuron Pool and Its InputsPabloNoch keine Bewertungen
- There's No Way This Isn't Racist - Daniels2018Dokument19 SeitenThere's No Way This Isn't Racist - Daniels2018elisaNoch keine Bewertungen
- A Socio-Ecological Study of Population, Migration, Urbanization, and Socio-Climate Variation in Andhra Pradesh and Telangana, IndiaDokument33 SeitenA Socio-Ecological Study of Population, Migration, Urbanization, and Socio-Climate Variation in Andhra Pradesh and Telangana, IndiaKousik D. MalakarNoch keine Bewertungen
- 2020 Ccaf Legal Regulatory Considerations ReportDokument50 Seiten2020 Ccaf Legal Regulatory Considerations ReportKarem MahmoudNoch keine Bewertungen
- Transparency and Algorithmic Governance PDFDokument57 SeitenTransparency and Algorithmic Governance PDFannas fahlevieNoch keine Bewertungen
- S W ?F Fe W 3 3 TS:, ',V Illii'Dokument290 SeitenS W ?F Fe W 3 3 TS:, ',V Illii'Crazy JattNoch keine Bewertungen
- Draft Report on Socio-Economic Development and Tourism Potential of LigligkotDokument34 SeitenDraft Report on Socio-Economic Development and Tourism Potential of Ligligkotroman poudyalNoch keine Bewertungen
- BankDokument32 SeitenBankBaby Prasanna Lakshmi KNoch keine Bewertungen
- Analysis On Customer Service Department Activities Of: HBL, Itahari BranchDokument50 SeitenAnalysis On Customer Service Department Activities Of: HBL, Itahari BranchSujan BajracharyaNoch keine Bewertungen
- Question BankDokument5 SeitenQuestion Bankmanisha mudgalNoch keine Bewertungen
- Business License Revocation Letter. Naomi I. Halter.1Dokument3 SeitenBusiness License Revocation Letter. Naomi I. Halter.1T RNoch keine Bewertungen
- Domain Engineering2Dokument507 SeitenDomain Engineering2darkHorseNoch keine Bewertungen
- Opm632 ErpDokument16 SeitenOpm632 ErpFARISYA HARMANNoch keine Bewertungen
- Managing Team Centricity in Modern Organizations-Information Age Publishing (2022)Dokument337 SeitenManaging Team Centricity in Modern Organizations-Information Age Publishing (2022)sappi13Noch keine Bewertungen
- Tata Motors Financial Analysis Case StudyDokument6 SeitenTata Motors Financial Analysis Case StudySoumendra RoyNoch keine Bewertungen
- Congenital Talipes (Clubfoot)Dokument222 SeitenCongenital Talipes (Clubfoot)Sampath MarasingheNoch keine Bewertungen
- Efficacy of Nano-Hydroxyapatite Coating On Osseointegration of Early Loaded Dental ImplantsDokument12 SeitenEfficacy of Nano-Hydroxyapatite Coating On Osseointegration of Early Loaded Dental ImplantsIJAR JOURNALNoch keine Bewertungen
- CRM Project-1: CRM Practices in FlipkartDokument14 SeitenCRM Project-1: CRM Practices in FlipkartKumar UtkarshNoch keine Bewertungen
- Statistics For MGMT I & IIDokument161 SeitenStatistics For MGMT I & IIewnetuNoch keine Bewertungen
- Report of Khushhali BankDokument20 SeitenReport of Khushhali BankZIA UL REHMANNoch keine Bewertungen
- Form 601-Partial Withdrawal Under NPSDokument3 SeitenForm 601-Partial Withdrawal Under NPSRanga Nayak PaltyaNoch keine Bewertungen
- Students' Council Involvement in Decision Making and Students' Discipline in Secondary Schools in Tongaren Sub County, KenyaDokument6 SeitenStudents' Council Involvement in Decision Making and Students' Discipline in Secondary Schools in Tongaren Sub County, KenyaEditor IJTSRDNoch keine Bewertungen
- SGS NT TRAINING MATERIAL - 1st EditionDokument48 SeitenSGS NT TRAINING MATERIAL - 1st EditionChigozie-umeh OgechukwuNoch keine Bewertungen
- Smart Irrigation System: Enhancing Agricultural SustainabilityDokument4 SeitenSmart Irrigation System: Enhancing Agricultural SustainabilityInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Design and Evaluation of A Smart-Glasses-based Service Support SystemDokument15 SeitenDesign and Evaluation of A Smart-Glasses-based Service Support SystemAl-Mahmudur RahmanNoch keine Bewertungen
- Book Shop System ManagementDokument18 SeitenBook Shop System ManagementFitim IbraimiNoch keine Bewertungen
- A Comparative Analysis On Customer Satisfaction Towards Reliance Jio and Airtel With Reference To AnantapurDokument12 SeitenA Comparative Analysis On Customer Satisfaction Towards Reliance Jio and Airtel With Reference To AnantapurEditor IJTSRDNoch keine Bewertungen
- Relevance of Laboratory On Teaching of Int - ScienceDokument83 SeitenRelevance of Laboratory On Teaching of Int - ScienceAdemolaNoch keine Bewertungen
- Scoring Package 3rd Eng 2021-22-1Dokument48 SeitenScoring Package 3rd Eng 2021-22-1Tayab TayabNoch keine Bewertungen
- JeebookDokument391 SeitenJeebookch100% (1)
- Application of Data ScienceDokument8 SeitenApplication of Data SciencepallaB ghoshNoch keine Bewertungen
- Resume With ExpDokument7 SeitenResume With ExprambabuNoch keine Bewertungen
- Bibliometric Analysis of The Research On Hydrogen Economy: An Analysis of Current Findings and Roadmap AheadDokument22 SeitenBibliometric Analysis of The Research On Hydrogen Economy: An Analysis of Current Findings and Roadmap AheadJoana SalgadoNoch keine Bewertungen
- NIU Transaction HandlingDokument20 SeitenNIU Transaction HandlingKriti Jain100% (2)
- Extent Managers Applied Inventory Control Approaches For Improving Operations of Small and Medium Scale Enterprises in South-East NigeriaDokument9 SeitenExtent Managers Applied Inventory Control Approaches For Improving Operations of Small and Medium Scale Enterprises in South-East NigeriaInternational Journal of Recent Innovations in Academic ResearchNoch keine Bewertungen
- Low-Cost Accelerometers For Robotic Manipulator PerceptionDokument7 SeitenLow-Cost Accelerometers For Robotic Manipulator PerceptionAbbé BusoniNoch keine Bewertungen
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerDokument8 SeitenOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyNoch keine Bewertungen
- Proc SPIE - Optra PaperDokument9 SeitenProc SPIE - Optra PapernorbdudeNoch keine Bewertungen
- Proc SPIE - 6304Dokument10 SeitenProc SPIE - 6304norbdudeNoch keine Bewertungen
- 2011 AO Li Y Risley Prisms Thick 2 Inverse ProblemXXDokument8 Seiten2011 AO Li Y Risley Prisms Thick 2 Inverse ProblemXXnorbdudeNoch keine Bewertungen
- 2010 - AO - 3D Scan - Telecentric Scanner and Double WedgesDokument21 Seiten2010 - AO - 3D Scan - Telecentric Scanner and Double WedgesnorbdudeNoch keine Bewertungen
- 2008 Appl Opt - Prism Interferometer - Small Angle DeviationDokument7 Seiten2008 Appl Opt - Prism Interferometer - Small Angle DeviationnorbdudeNoch keine Bewertungen
- 2009 Jbo Rat With SsoctDokument3 Seiten2009 Jbo Rat With SsoctnorbdudeNoch keine Bewertungen
- 2009 AO ND Filters With Risley PrismsDokument8 Seiten2009 AO ND Filters With Risley PrismsnorbdudeNoch keine Bewertungen
- 2011 AO Li Y Risley Prisms Thick XXDokument8 Seiten2011 AO Li Y Risley Prisms Thick XXnorbdudeNoch keine Bewertungen
- 2011 AO Li Y Risley Prisms Thick XXDokument8 Seiten2011 AO Li Y Risley Prisms Thick XXnorbdudeNoch keine Bewertungen
- 2008 OPEX Microprisms ArrayDokument11 Seiten2008 OPEX Microprisms ArraynorbdudeNoch keine Bewertungen
- 2009 SpringerOpt Review - OCT PT Carii DentareDokument6 Seiten2009 SpringerOpt Review - OCT PT Carii DentarenorbdudeNoch keine Bewertungen
- 2007 OPEX Baumann - FD OCT - No Phase ShiftersDokument13 Seiten2007 OPEX Baumann - FD OCT - No Phase ShiftersnorbdudeNoch keine Bewertungen
- Beat The Micros in 2012Dokument43 SeitenBeat The Micros in 2012norbdudeNoch keine Bewertungen
- 2010 AO - Lee - Rolland - Dual Detection FD OCTDokument3 Seiten2010 AO - Lee - Rolland - Dual Detection FD OCTnorbdudeNoch keine Bewertungen
- 7 Deadly Sins of Style Edition 2 PDFDokument47 Seiten7 Deadly Sins of Style Edition 2 PDFBagus ZakiNoch keine Bewertungen
- 2007 JBO Jenkins 4D Scan Avian Heart XDokument3 Seiten2007 JBO Jenkins 4D Scan Avian Heart XnorbdudeNoch keine Bewertungen
- 2005 Ao Lee Rolland FD OctDokument14 Seiten2005 Ao Lee Rolland FD OctnorbdudeNoch keine Bewertungen
- 2006 OPEX Miyazaki - Volumetric Display - 3D ScanningDokument10 Seiten2006 OPEX Miyazaki - Volumetric Display - 3D ScanningnorbdudeNoch keine Bewertungen
- 2003 - Taylor & Francis Chap - Montagu - GS and Resonant ScannersDokument53 Seiten2003 - Taylor & Francis Chap - Montagu - GS and Resonant ScannersnorbdudeNoch keine Bewertungen
- 2011 PRER Elsevier - Podoleanu - Retina OCTDokument36 Seiten2011 PRER Elsevier - Podoleanu - Retina OCTnorbdudeNoch keine Bewertungen
- Booklet Global Marketing - 2013Dokument12 SeitenBooklet Global Marketing - 2013norbdudeNoch keine Bewertungen
- Cross-Validation of Component Models: A Critical Look at Current MethodsDokument12 SeitenCross-Validation of Component Models: A Critical Look at Current MethodsDũng PhạmNoch keine Bewertungen
- OMAE2018 ProgramDokument124 SeitenOMAE2018 ProgramTahsin TezdoganNoch keine Bewertungen
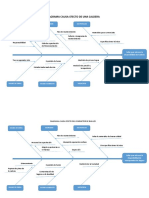
- Caldera causa-efecto diagrama mantenimiento fallasDokument2 SeitenCaldera causa-efecto diagrama mantenimiento fallasDaniel Will Morales GuerreroNoch keine Bewertungen
- Relevance of Research in Social WorkDokument15 SeitenRelevance of Research in Social WorkangelgijoNoch keine Bewertungen
- Hatch Cover Analysis of Capesize Bulk CarriersDokument6 SeitenHatch Cover Analysis of Capesize Bulk CarriersBasem TamNoch keine Bewertungen
- UV Visible SpectrosDokument8 SeitenUV Visible Spectrosbarani_autNoch keine Bewertungen
- AS (GCE) Instant Revision of ChemistryDokument130 SeitenAS (GCE) Instant Revision of ChemistryOlivia Panterka Vainilla100% (4)
- TR-4/2011 Hdb/Hds/Sdb/Pdb/Mrs Listed Materials PPI Listing ofDokument69 SeitenTR-4/2011 Hdb/Hds/Sdb/Pdb/Mrs Listed Materials PPI Listing ofDAVID GREGORIO FRANCO ANDRADENoch keine Bewertungen
- The Key To Extra Terrestrial Disclosure May Be The Lake Erie UFO's!Dokument34 SeitenThe Key To Extra Terrestrial Disclosure May Be The Lake Erie UFO's!Michael Lee Hill100% (1)
- United Institute of Technology: B-Tech (En Vii SEM-2014-15) Lecture PlanDokument2 SeitenUnited Institute of Technology: B-Tech (En Vii SEM-2014-15) Lecture PlanRudra Kumar MishraNoch keine Bewertungen
- Mass Transfer PartDokument54 SeitenMass Transfer Partoctoviancletus100% (3)
- 6 Materials Summary 2014Dokument31 Seiten6 Materials Summary 2014api-248740887Noch keine Bewertungen
- Airy FunctionDokument10 SeitenAiry Functionalokesh1982Noch keine Bewertungen
- Diffusivity Equation: 13 February 2008Dokument17 SeitenDiffusivity Equation: 13 February 2008Yaser RashedNoch keine Bewertungen
- Theory of Time MachineDokument127 SeitenTheory of Time MachineUday HiwaraleNoch keine Bewertungen
- Copia de GranulometriaDokument1 SeiteCopia de GranulometriaSantiago GiraldoNoch keine Bewertungen
- Precast Bridge DeckDokument4 SeitenPrecast Bridge DeckPaul_delgadoNoch keine Bewertungen
- TEC Novatop Terminal GBDokument79 SeitenTEC Novatop Terminal GBahmedNoch keine Bewertungen
- Hecke's L-FunctionsDokument102 SeitenHecke's L-FunctionsluisufspaiandreNoch keine Bewertungen
- Magnetic Field and Magnetic Effects of Current: Assignment 2Dokument2 SeitenMagnetic Field and Magnetic Effects of Current: Assignment 2HaRryNoch keine Bewertungen
- Geotechnical Aspects of Building Design (EN 1997) : Eurocode 2Dokument55 SeitenGeotechnical Aspects of Building Design (EN 1997) : Eurocode 2margitorsiNoch keine Bewertungen
- CAESAR II MAX Combination LoadCaseDokument2 SeitenCAESAR II MAX Combination LoadCasePrashant ChauhanNoch keine Bewertungen
- The Four Ethers: Contributions to Rudolf Steiner's Science of the EthersDokument33 SeitenThe Four Ethers: Contributions to Rudolf Steiner's Science of the EthersSolomanTrismosin100% (2)
- Buttwelding ProcedureDokument5 SeitenButtwelding ProcedurePrageeth Nalaka ArambegedaraNoch keine Bewertungen
- Engineering Design Guideline - Measurement Rev02webDokument16 SeitenEngineering Design Guideline - Measurement Rev02weblutfi awn0% (1)
- Friction PDFDokument32 SeitenFriction PDFKudzai MushunjeNoch keine Bewertungen
- Ordinary Level Heat NotesDokument44 SeitenOrdinary Level Heat Notespatrick omonyNoch keine Bewertungen
- V Notch PracticalDokument13 SeitenV Notch PracticalAnushaBheenuck0% (2)
- Soil Bearing CapacityDokument33 SeitenSoil Bearing CapacityAce JokerNoch keine Bewertungen
- Determination of The Surface Tension of Liquid Stainless SteelDokument5 SeitenDetermination of The Surface Tension of Liquid Stainless SteelĐào ThườngNoch keine Bewertungen