Das könnte Ihnen auch gefallen
- Process Control System A Complete Guide - 2020 EditionVon EverandProcess Control System A Complete Guide - 2020 EditionNoch keine Bewertungen
- L1 Instrumentation CANDUDokument100 SeitenL1 Instrumentation CANDUIonescu ViorelNoch keine Bewertungen
- RSLOGIX5000 Programming A Clear and Concise ReferenceVon EverandRSLOGIX5000 Programming A Clear and Concise ReferenceNoch keine Bewertungen
- Commissioning Issues and Solutions: Teo Puay Yong Pepperl+Fuchs Pte LTD SingaporeDokument52 SeitenCommissioning Issues and Solutions: Teo Puay Yong Pepperl+Fuchs Pte LTD Singaporesolo AdoNoch keine Bewertungen
- dvc6000 Valve ControllerDokument46 Seitendvc6000 Valve Controllermcschuster6879Noch keine Bewertungen
- PLC Instruction ListDokument4 SeitenPLC Instruction ListPrestoneKNoch keine Bewertungen
- Use of OscilloscopeDokument13 SeitenUse of Oscilloscopesonja_ŽarićNoch keine Bewertungen
- Knowledge is "Real Power": Introduction to Power QualityVon EverandKnowledge is "Real Power": Introduction to Power QualityNoch keine Bewertungen
- DPT Smart Pressure TransmitterDokument15 SeitenDPT Smart Pressure Transmitterprasanta_bbsrNoch keine Bewertungen
- ABB PLC-2 System 1772Dokument170 SeitenABB PLC-2 System 1772Mohsin Shaukat100% (1)
- Access Control System A Complete Guide - 2020 EditionVon EverandAccess Control System A Complete Guide - 2020 EditionNoch keine Bewertungen
- A Systematic Approach To Develop PLC Program For Automation of A Backwash Water Treatment PlantDokument6 SeitenA Systematic Approach To Develop PLC Program For Automation of A Backwash Water Treatment PlantOscar GaloNoch keine Bewertungen
- Distributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979Von EverandDistributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979T. J. HarrisonNoch keine Bewertungen
- Main Report DCSDokument26 SeitenMain Report DCSjoymotiNoch keine Bewertungen
- GFS-426B PACSystems ProgrammingDokument460 SeitenGFS-426B PACSystems ProgrammingElafanNoch keine Bewertungen
- 3.1 Fat Document BSL Tata Olp PLC SystemDokument6 Seiten3.1 Fat Document BSL Tata Olp PLC Systemkoushik42000Noch keine Bewertungen
- Wonderware FactorySuite A2 Deployment Guide PDFDokument392 SeitenWonderware FactorySuite A2 Deployment Guide PDFDeanLefebvre0% (1)
- Level ControllerDokument3 SeitenLevel ControllerPriasmoro Galih SantosoNoch keine Bewertungen
- Hand-Held Terminal: (Catalog Number 1747-PT1)Dokument465 SeitenHand-Held Terminal: (Catalog Number 1747-PT1)Daniel LaraNoch keine Bewertungen
- 02 - DCS - Introduction To DCSDokument27 Seiten02 - DCS - Introduction To DCSSyahir ZufayriNoch keine Bewertungen
- Topdoc ManualDokument275 SeitenTopdoc ManualGianny Marcos Fonseca AiresNoch keine Bewertungen
- Users Guide - 4 - 1Dokument126 SeitenUsers Guide - 4 - 1punwireNoch keine Bewertungen
- 1756-pm006 - En-P - Sequential Function ChartsDokument82 Seiten1756-pm006 - En-P - Sequential Function Chartsjediael.pjNoch keine Bewertungen
- CM44PDokument52 SeitenCM44PSadot GutierrezNoch keine Bewertungen
- Max DnaDokument17 SeitenMax DnaAdil ButtNoch keine Bewertungen
- Allen Bradley Power Monitor 3000 Manual PDFDokument356 SeitenAllen Bradley Power Monitor 3000 Manual PDFAndrewcaesar100% (1)
- Exp3 - Air Pressure ControlDokument8 SeitenExp3 - Air Pressure ControlDon LawrenceNoch keine Bewertungen
- Basic Temperature Control SystemDokument26 SeitenBasic Temperature Control SystemRajeev ValunjkarNoch keine Bewertungen
- Iom - 1-250Dokument250 SeitenIom - 1-250Eduardo JoseNoch keine Bewertungen
- Iasimp qr009 en P PDFDokument10 SeitenIasimp qr009 en P PDFToni PrattNoch keine Bewertungen
- Ipcs Automation: Preparing Students As Per The Industry DemandsDokument8 SeitenIpcs Automation: Preparing Students As Per The Industry DemandsGince GeorgeNoch keine Bewertungen
- Rockwell Automation Library of Process P - PIDEDokument70 SeitenRockwell Automation Library of Process P - PIDEjuanjovm77Noch keine Bewertungen
- 13 - Instrumentation & ControlDokument11 Seiten13 - Instrumentation & ControlNoman AslamNoch keine Bewertungen
- PlantPAx Distributed Control System - The Modern DCSDokument20 SeitenPlantPAx Distributed Control System - The Modern DCSVÕ QUỐC HIỆUNoch keine Bewertungen
- NW User ManualDokument51 SeitenNW User Manualscribdhas2006Noch keine Bewertungen
- Training Kit PEK 408 EngDokument38 SeitenTraining Kit PEK 408 EngSyed Mohammad NaveedNoch keine Bewertungen
- Allen Bradley Plant Wide Process ControlDokument2 SeitenAllen Bradley Plant Wide Process ControlEric DunnNoch keine Bewertungen
- UPS Maintenance GuidelinesDokument5 SeitenUPS Maintenance GuidelinessunilNoch keine Bewertungen
- AB Micrologix PLC PDFDokument50 SeitenAB Micrologix PLC PDFYasir100% (1)
- LT Radar-GWR Calibration FFDokument2 SeitenLT Radar-GWR Calibration FFKram Alim VillonNoch keine Bewertungen
- MBE Driver PDFDokument145 SeitenMBE Driver PDFDe NoniNoch keine Bewertungen
- Boiler Control OverviewDokument4 SeitenBoiler Control OverviewMAS98Noch keine Bewertungen
- Turbine Supervisory Instrumentation Selection Guide - RockwellDokument52 SeitenTurbine Supervisory Instrumentation Selection Guide - Rockwellhozipek100% (1)
- INTRON-D Plus: System Overview, Key Components, Networking Capabilities and MoreDokument28 SeitenINTRON-D Plus: System Overview, Key Components, Networking Capabilities and MoreEhsan RohaniNoch keine Bewertungen
- Fisher Fieldbus6200Dokument340 SeitenFisher Fieldbus6200Arun KumarNoch keine Bewertungen
- Instrucalc IIDokument27 SeitenInstrucalc IINorberto Soto100% (1)
- Flowgate: TM Software ManualDokument25 SeitenFlowgate: TM Software ManualCsar GarciaNoch keine Bewertungen
- PID Modullar ControllerDokument200 SeitenPID Modullar ControllerMohamed ElsayedNoch keine Bewertungen
- Product List: Pressure MeasurementDokument6 SeitenProduct List: Pressure MeasurementSr FarezNoch keine Bewertungen
- HJDokument4 SeitenHJShajil VazhakkalilNoch keine Bewertungen
- 980TD PLC User Manual (English Version)Dokument162 Seiten980TD PLC User Manual (English Version)Frank DazaNoch keine Bewertungen
- Above1kVInsulationsGuide BR en V01-DIG PDFDokument40 SeitenAbove1kVInsulationsGuide BR en V01-DIG PDFIsrael JosueNoch keine Bewertungen
- En ACS580 Standard Control Program FW C A5Dokument440 SeitenEn ACS580 Standard Control Program FW C A5joseNoch keine Bewertungen
- IIA NotesDokument143 SeitenIIA NotesJohn JNoch keine Bewertungen
- Boiler Instrumentation and ControlsDokument23 SeitenBoiler Instrumentation and Controlshayat umar bhat100% (4)
- Asymptotic Analysis Big-Oh: Basic Examples: Design and Analysis of Algorithms IDokument3 SeitenAsymptotic Analysis Big-Oh: Basic Examples: Design and Analysis of Algorithms IAbhinav GuptaNoch keine Bewertungen
- Asymptotic Analysis Big-Oh: Definition: Design and Analysis of Algorithms IDokument3 SeitenAsymptotic Analysis Big-Oh: Definition: Design and Analysis of Algorithms IAbhinav GuptaNoch keine Bewertungen
- X e e e X F: Birla Institute of Technology & Science, PilaniDokument1 SeiteX e e e X F: Birla Institute of Technology & Science, PilaniAbhinav GuptaNoch keine Bewertungen
- Zeb and Haniya Shantanu Moitra and Swanand Kirkire - Dewarists Song 2 LyricsDokument2 SeitenZeb and Haniya Shantanu Moitra and Swanand Kirkire - Dewarists Song 2 LyricsAbhinav GuptaNoch keine Bewertungen
- Asymptotic Analysis Big-Oh: Relatives (Omega & Theta) : Design and Analysis of Algorithms IDokument6 SeitenAsymptotic Analysis Big-Oh: Relatives (Omega & Theta) : Design and Analysis of Algorithms IAbhinav GuptaNoch keine Bewertungen
- Chapter 8Dokument34 SeitenChapter 8Abhinav GuptaNoch keine Bewertungen
- Chapter 9Dokument18 SeitenChapter 9Abhinav GuptaNoch keine Bewertungen
- Ac Bridges: AC Bridges Used For: - Impedance Measurement - Oscillator Circuit - Filtering Circuit - Frequency MeasurementDokument40 SeitenAc Bridges: AC Bridges Used For: - Impedance Measurement - Oscillator Circuit - Filtering Circuit - Frequency MeasurementAbhinav GuptaNoch keine Bewertungen
- APPLICATION GUIDE - PID FunctionDokument43 SeitenAPPLICATION GUIDE - PID FunctioniedmondNoch keine Bewertungen
- Ebook - Eng - Electronics - Theory - Operational AmplifiersDokument35 SeitenEbook - Eng - Electronics - Theory - Operational AmplifiersVijay SurendranNoch keine Bewertungen
- Digital Oscilloscope CharacteristicsDokument11 SeitenDigital Oscilloscope CharacteristicsAbhinav GuptaNoch keine Bewertungen
- Variable AttenuatorDokument9 SeitenVariable AttenuatorAbhinav GuptaNoch keine Bewertungen
- Digital Storage Digital Storage OscilloscopeDokument21 SeitenDigital Storage Digital Storage OscilloscopeAbhinav GuptaNoch keine Bewertungen
- AttenuatorsDokument20 SeitenAttenuatorsAbhinav GuptaNoch keine Bewertungen
- Peak Reading Voltmeter: +Vp +Vp +Vp Vp π 2 π ωt Vp π 2 π ωt ωt +VpDokument30 SeitenPeak Reading Voltmeter: +Vp +Vp +Vp Vp π 2 π ωt Vp π 2 π ωt ωt +VpAbhinav GuptaNoch keine Bewertungen
- Wheatstone Bridge: R R R R R R R RDokument24 SeitenWheatstone Bridge: R R R R R R R RAbhinav GuptaNoch keine Bewertungen
- Digital Digital Meters MetersDokument30 SeitenDigital Digital Meters MetersAbhinav GuptaNoch keine Bewertungen
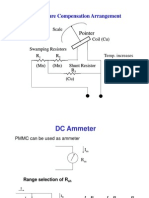
- Temperature Compensation Arrangement: Pointer PointerDokument16 SeitenTemperature Compensation Arrangement: Pointer PointerAbhinav GuptaNoch keine Bewertungen
- OscilloscopesDokument46 SeitenOscilloscopesAbhinav GuptaNoch keine Bewertungen
- Multimeter For Remote Sensing of Resistance: Two Wire Resistance MeasurementDokument35 SeitenMultimeter For Remote Sensing of Resistance: Two Wire Resistance MeasurementAbhinav GuptaNoch keine Bewertungen
- Specifications of Digital Meters: Display Digits and CountsDokument29 SeitenSpecifications of Digital Meters: Display Digits and CountsAbhinav GuptaNoch keine Bewertungen
- Electronic Instruments and Instrumentation Technology: Instr C355Dokument34 SeitenElectronic Instruments and Instrumentation Technology: Instr C355Abhinav GuptaNoch keine Bewertungen
- Welcome To Electronic Instruments and Instrumentation and Instrumentation Technology Gy Instr C355 Instr C355Dokument18 SeitenWelcome To Electronic Instruments and Instrumentation and Instrumentation Technology Gy Instr C355 Instr C355Abhinav GuptaNoch keine Bewertungen
- Eigen 2Dokument8 SeitenEigen 2Abhinav GuptaNoch keine Bewertungen
- Problem:: R R R R - 1V 10V 50V 100VDokument28 SeitenProblem:: R R R R - 1V 10V 50V 100VAbhinav GuptaNoch keine Bewertungen
- Electronic Analog MetersDokument25 SeitenElectronic Analog MetersAbhinav GuptaNoch keine Bewertungen
- Using The Internet in Eduaction: Ewa NawrotDokument23 SeitenUsing The Internet in Eduaction: Ewa NawrotAbhinav GuptaNoch keine Bewertungen
- Instr C312 90Dokument4 SeitenInstr C312 90Abhinav GuptaNoch keine Bewertungen
- RM08001 JLinkUSBProtocolDokument76 SeitenRM08001 JLinkUSBProtocolRahumath AliNoch keine Bewertungen
- Carburetor Troubleshooting Repair Guide For HondaDokument9 SeitenCarburetor Troubleshooting Repair Guide For HondaRoyal ENoch keine Bewertungen
- Techniques For Natural Gas SamplingDokument5 SeitenTechniques For Natural Gas Samplingmicroco4Noch keine Bewertungen
- Msds Ammonium BicarbonateDokument5 SeitenMsds Ammonium BicarbonateHayleyNoch keine Bewertungen
- Leslie 2101 Service ManualDokument22 SeitenLeslie 2101 Service ManualrichiesilvesterNoch keine Bewertungen
- Fan Selection HT63JM312-4616Dokument4 SeitenFan Selection HT63JM312-4616glennpanNoch keine Bewertungen
- 320D Control Van Schema PDFDokument52 Seiten320D Control Van Schema PDFAhmad Minangkabau100% (5)
- Solving Even-Parity Problems Using Traceless Genetic ProgrammingDokument7 SeitenSolving Even-Parity Problems Using Traceless Genetic ProgrammingMihai OlteanNoch keine Bewertungen
- Chemistry SPM Question Bank Chapter 14Dokument6 SeitenChemistry SPM Question Bank Chapter 14Abdul ManafNoch keine Bewertungen
- 0042-11 Injection Actuation Pressure Output FaultDokument1 Seite0042-11 Injection Actuation Pressure Output FaultHamilton Miranda100% (3)
- Steam Distillation ApparatusDokument4 SeitenSteam Distillation ApparatusAshish VermaNoch keine Bewertungen
- Jurnal SatelitDokument22 SeitenJurnal SatelitIsmu Nagh X-troneNoch keine Bewertungen
- Java SwingDokument7 SeitenJava SwingriteshyaaraaNoch keine Bewertungen
- Cantas Marine Catalogue 2016Dokument68 SeitenCantas Marine Catalogue 2016MohamedNoch keine Bewertungen
- Learn SQL - CodecademyDokument19 SeitenLearn SQL - CodecademyNeto UnoNoch keine Bewertungen
- Work in Substations - GeneralDokument25 SeitenWork in Substations - GeneralJulian Zuluaga0% (1)
- Yamaha - RX v620 - HTR 5460 - RX v620rds 1 PDFDokument84 SeitenYamaha - RX v620 - HTR 5460 - RX v620rds 1 PDFLuis BarreirinhasNoch keine Bewertungen
- Difference Between Emulsion and Distemper PaintsDokument3 SeitenDifference Between Emulsion and Distemper PaintsadkNoch keine Bewertungen
- Comparative Study Between Engineering Stripe and Feeder Stripe 2165 8064 1000346Dokument10 SeitenComparative Study Between Engineering Stripe and Feeder Stripe 2165 8064 1000346NahidulIslamHadiNoch keine Bewertungen
- Earthquake Resistant Building ConstructionDokument1 SeiteEarthquake Resistant Building ConstructionGenver HoraNoch keine Bewertungen
- K10 Quarter 1 Module 2 Activity No. 7Dokument2 SeitenK10 Quarter 1 Module 2 Activity No. 7Daniel TabingaNoch keine Bewertungen
- Operating Instructions: Version 11/11/2015 ©2015 Ps Automation GMBHDokument16 SeitenOperating Instructions: Version 11/11/2015 ©2015 Ps Automation GMBHJuan Manuel Gutierrez AguilarNoch keine Bewertungen
- Scissor Lift CalculatorDokument2 SeitenScissor Lift CalculatorKishore Bhat50% (4)
- PPDCL PQN Biomass FSD Ad 22122017Dokument1 SeitePPDCL PQN Biomass FSD Ad 22122017WaleedNoch keine Bewertungen
- 32ls3450 Chassis La25cDokument60 Seiten32ls3450 Chassis La25cioanamonicapaunNoch keine Bewertungen
- Bar Grating Anchoring & FastnersDokument2 SeitenBar Grating Anchoring & Fastnersseccion3dNoch keine Bewertungen
- Cryogenic Brochure 2015Dokument10 SeitenCryogenic Brochure 2015SAUGAT DUTTANoch keine Bewertungen
- Architectural Malinowski'S RESIDENTE 10-10-18Dokument12 SeitenArchitectural Malinowski'S RESIDENTE 10-10-18Denis HaurdicNoch keine Bewertungen
- Instructional Manual For Dead Weight Pressure Gauge TesterDokument6 SeitenInstructional Manual For Dead Weight Pressure Gauge TesterRAVI BARTIANoch keine Bewertungen
- ELCB - DISTRI BOARDS - ZE - TZ Series CatalogueDokument1 SeiteELCB - DISTRI BOARDS - ZE - TZ Series CatalogueAkun Iseng00001Noch keine Bewertungen
- University of Chicago Press Fall 2009 CatalogueVon EverandUniversity of Chicago Press Fall 2009 CatalogueBewertung: 5 von 5 Sternen5/5 (1)
- University of Chicago Press Fall 2009 Distributed TitlesVon EverandUniversity of Chicago Press Fall 2009 Distributed TitlesBewertung: 1 von 5 Sternen1/5 (1)