Das könnte Ihnen auch gefallen
- 1 2 3 4 PID Self-Tuner Simatic: User ManualDokument50 Seiten1 2 3 4 PID Self-Tuner Simatic: User Manualdlario22Noch keine Bewertungen
- PID Control Manual 6540Dokument26 SeitenPID Control Manual 6540Lizandro ZapataNoch keine Bewertungen
- CH 8Dokument81 SeitenCH 8kfaliNoch keine Bewertungen
- Simatic Standard PID Control: First Steps in CommissioningDokument6 SeitenSimatic Standard PID Control: First Steps in CommissioningPunit LadaniNoch keine Bewertungen
- 1772-6 6 3Dokument68 Seiten1772-6 6 3jvalle210Noch keine Bewertungen
- Qcpu SFCDokument66 SeitenQcpu SFCLê PhướcNoch keine Bewertungen
- Unit-2 Case Study Embedded System For Automatic Washing MachineDokument11 SeitenUnit-2 Case Study Embedded System For Automatic Washing Machinesujith84% (19)
- PID Modullar ControllerDokument200 SeitenPID Modullar ControllerMohamed ElsayedNoch keine Bewertungen
- s71500 Pid Control Function Manual EnUS en-USDokument570 Seitens71500 Pid Control Function Manual EnUS en-USTonheca RockkNoch keine Bewertungen
- W07E-EN-02 CP1L GettingStartedGuideDokument167 SeitenW07E-EN-02 CP1L GettingStartedGuideRuiBarrosNoch keine Bewertungen
- ABB Controller IM - C501 - 10.manual (SLPC) PDFDokument108 SeitenABB Controller IM - C501 - 10.manual (SLPC) PDFsimansonNoch keine Bewertungen
- Applying Control Theory to a Real DC Motor in LabVIEWDokument5 SeitenApplying Control Theory to a Real DC Motor in LabVIEWnorickespinosNoch keine Bewertungen
- Areva p132 p139 612 Xrio Converter Manual Enu Tu2.30 v1.000Dokument8 SeitenAreva p132 p139 612 Xrio Converter Manual Enu Tu2.30 v1.000Robert MihayoNoch keine Bewertungen
- Minor Project ReportDokument29 SeitenMinor Project ReportHiteshNoch keine Bewertungen
- Installation and Operation Manual 3500 PDFDokument30 SeitenInstallation and Operation Manual 3500 PDFHalley PérezNoch keine Bewertungen
- 7SD5xx Manual A1 V043003 enDokument698 Seiten7SD5xx Manual A1 V043003 enngocanh2007Noch keine Bewertungen
- Getting Started Guide: Cp1L Cpu UnitDokument167 SeitenGetting Started Guide: Cp1L Cpu UnitJoão Teixeira JúniorNoch keine Bewertungen
- LadderProg ManualDokument47 SeitenLadderProg ManualJeny KissyouNoch keine Bewertungen
- VFDC-4000 Controller: Variable Frequency Drive Controller User ManualDokument28 SeitenVFDC-4000 Controller: Variable Frequency Drive Controller User Manualzorgglub100% (1)
- Mitsubishi Alpha Beginners Manual PDFDokument53 SeitenMitsubishi Alpha Beginners Manual PDFGuillermo Osvaldo Rivera MelladoNoch keine Bewertungen
- Manual MitsubishiDokument53 SeitenManual MitsubishiIustin AlexandruNoch keine Bewertungen
- 7SA522x Manual A3 v043003 UsDokument592 Seiten7SA522x Manual A3 v043003 UsDrastaru ValentinNoch keine Bewertungen
- Manual Ut750 PDFDokument110 SeitenManual Ut750 PDFJhois BillNoch keine Bewertungen
- I203-E2-02 mcw151 OpermanualDokument276 SeitenI203-E2-02 mcw151 OpermanualalhalwaniNoch keine Bewertungen
- Mitsubishi PLC PID Control InstructionsDokument110 SeitenMitsubishi PLC PID Control InstructionsDimitris TzNoch keine Bewertungen
- Model ETR-3000 Automatic Tuning 1/32 Din SMARTER LOGIC ControllerDokument40 SeitenModel ETR-3000 Automatic Tuning 1/32 Din SMARTER LOGIC ControllerkmpoulosNoch keine Bewertungen
- 6MD63xx Manual A7 V046002 USDokument244 Seiten6MD63xx Manual A7 V046002 USDragan AjdačićNoch keine Bewertungen
- Alpha Usermanual PDFDokument53 SeitenAlpha Usermanual PDFAlfredo MamaniNoch keine Bewertungen
- W461-E1-02 CP1E Introduction ManualDokument183 SeitenW461-E1-02 CP1E Introduction Manualtrandanhhai0% (1)
- Modular 3ph Handbuch Englisch en-USDokument64 SeitenModular 3ph Handbuch Englisch en-USGilberto VillamarinNoch keine Bewertungen
- Pat 2 ManualDokument504 SeitenPat 2 ManualAngel Dlsg95% (19)
- PLC Programming MPS 152Dokument25 SeitenPLC Programming MPS 152ivan garciaNoch keine Bewertungen
- TDBFP Level TransmitterDokument16 SeitenTDBFP Level TransmitterVIJAYPORNoch keine Bewertungen
- 2SP0115T Control IGBT ManualDokument21 Seiten2SP0115T Control IGBT Manualhieuhuech1Noch keine Bewertungen
- Smartgen-HGM410 HGM420 V1.6 en PDFDokument44 SeitenSmartgen-HGM410 HGM420 V1.6 en PDFRahmat Nur Ilham100% (4)
- Harsen GU611A-EN0724 PDFDokument34 SeitenHarsen GU611A-EN0724 PDFSteven J Baynes100% (2)
- Instruction Manual for FUZZY Temperature ControllerDokument98 SeitenInstruction Manual for FUZZY Temperature ControllernmartinezNoch keine Bewertungen
- GOT1000 Quick Start GuideDokument56 SeitenGOT1000 Quick Start GuideTetsusaigaNoch keine Bewertungen
- 7UM61x Manual PDFDokument424 Seiten7UM61x Manual PDFJavier Valencia MurilloNoch keine Bewertungen
- User Manual: 1305 Adjustable Frequency AC Drive (Series C)Dokument170 SeitenUser Manual: 1305 Adjustable Frequency AC Drive (Series C)6612poolNoch keine Bewertungen
- TK 61755-2-OD-EN A-Series Control System Single Temperature Units RevE 11-2022 LRDokument256 SeitenTK 61755-2-OD-EN A-Series Control System Single Temperature Units RevE 11-2022 LRTecnico Anzizar100% (1)
- SR-3 Valdymas Šaldymo Agregatų Naudojimosi Instrukcija PDFDokument723 SeitenSR-3 Valdymas Šaldymo Agregatų Naudojimosi Instrukcija PDFSüleyman mengil50% (2)
- GE Fanuc Micro PLC User's Guide, GFK-0803BDokument165 SeitenGE Fanuc Micro PLC User's Guide, GFK-0803BJohan SneiderNoch keine Bewertungen
- Fanuc Servo Motor Parameter Manual 123Dokument627 SeitenFanuc Servo Motor Parameter Manual 123bertomedrano100% (1)
- Omron Cpm1a ManualDokument146 SeitenOmron Cpm1a ManualTeddy SandovalNoch keine Bewertungen
- GFK1192BDokument229 SeitenGFK1192Baquiles villarroelNoch keine Bewertungen
- Mid 222 2Dokument36 SeitenMid 222 2danecuprija100% (1)
- Gek 90486f 1geniusiosystemandcommunicationsDokument211 SeitenGek 90486f 1geniusiosystemandcommunicationsMohamed AlkharashyNoch keine Bewertungen
- Models UT550/UT520 Digital Indicating Controllers: User's ManualDokument108 SeitenModels UT550/UT520 Digital Indicating Controllers: User's Manuallisita23_182Noch keine Bewertungen
- PID ControlDokument32 SeitenPID Controlanurag_pai_1Noch keine Bewertungen
- Simatic Advanced PDFDokument268 SeitenSimatic Advanced PDFFelipe Emc SegoviaNoch keine Bewertungen
- Batch Controller: F-Series - Field Mounted Indicators For Safe and Hazardous AreasDokument52 SeitenBatch Controller: F-Series - Field Mounted Indicators For Safe and Hazardous Areassathyanand tkNoch keine Bewertungen
- Vol 5 ENGDokument76 SeitenVol 5 ENGAlaa ZoraNoch keine Bewertungen
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsVon EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNoch keine Bewertungen
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosVon EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosBewertung: 5 von 5 Sternen5/5 (1)
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneVon EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNoch keine Bewertungen
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisVon EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisBewertung: 4 von 5 Sternen4/5 (2)
- DL205 Power Requirements and DimensionsDokument2 SeitenDL205 Power Requirements and DimensionsiedmondNoch keine Bewertungen
- DL205 Power Requirements and DimensionsDokument2 SeitenDL205 Power Requirements and DimensionsiedmondNoch keine Bewertungen
- Pt100sensoren eDokument4 SeitenPt100sensoren eMuhammadRaihanNoch keine Bewertungen
- Easy9 - EZ9ET24L Consumer Unit Specification SheetDokument1 SeiteEasy9 - EZ9ET24L Consumer Unit Specification SheetiedmondNoch keine Bewertungen
- W03160en - Seat Leakage DetectionDokument4 SeitenW03160en - Seat Leakage DetectioniedmondNoch keine Bewertungen
- Basic Process Control Systems Used For Safety Instrumented FunctionsDokument14 SeitenBasic Process Control Systems Used For Safety Instrumented FunctionsLuc SchramNoch keine Bewertungen
- OPC Data Manager ManualDokument50 SeitenOPC Data Manager ManualiedmondNoch keine Bewertungen
- Introduction To Ethernet IPDokument43 SeitenIntroduction To Ethernet IPiedmondNoch keine Bewertungen
- Industrial Internet of Things (IIoT) Impact On The Oil & Gas Industry Value ChainDokument16 SeitenIndustrial Internet of Things (IIoT) Impact On The Oil & Gas Industry Value ChainiedmondNoch keine Bewertungen
- Pt100sensoren eDokument4 SeitenPt100sensoren eMuhammadRaihanNoch keine Bewertungen
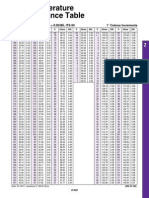
- For European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsDokument3 SeitenFor European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsMary HarrisonNoch keine Bewertungen
- Halogen FreeDokument8 SeitenHalogen FreeMarko IvanečkiNoch keine Bewertungen
- Basic Process Control Systems Used For Safety Instrumented FunctionsDokument14 SeitenBasic Process Control Systems Used For Safety Instrumented FunctionsLuc SchramNoch keine Bewertungen
- Business Traveller Africa BT105-July-2016Dokument68 SeitenBusiness Traveller Africa BT105-July-2016iedmondNoch keine Bewertungen
- Modular Greenhouse KitDokument2 SeitenModular Greenhouse KitiedmondNoch keine Bewertungen
- Echochange-Gateway Doku v10 e PDFDokument32 SeitenEchochange-Gateway Doku v10 e PDFiedmondNoch keine Bewertungen
- Modulair GreenhouseDokument4 SeitenModulair GreenhouseiedmondNoch keine Bewertungen
- Migdcs Pp008 en eDokument4 SeitenMigdcs Pp008 en eiedmondNoch keine Bewertungen
- Modulair GreenhouseDokument4 SeitenModulair GreenhouseiedmondNoch keine Bewertungen
- The Internet of Things: Opportunities & ChallengesDokument17 SeitenThe Internet of Things: Opportunities & ChallengesiedmondNoch keine Bewertungen
- Conditions Min Typ Max Unit: +1 / 508 295 0771 Usa: +49 / 7731 8399 0 EuropeDokument1 SeiteConditions Min Typ Max Unit: +1 / 508 295 0771 Usa: +49 / 7731 8399 0 EuropeiedmondNoch keine Bewertungen
- HART Communication Made EasyDokument2 SeitenHART Communication Made EasyiedmondNoch keine Bewertungen
- FactoryTalk View ME and PanelView PlusDokument2 SeitenFactoryTalk View ME and PanelView PlusiedmondNoch keine Bewertungen
- 1756 Um523 - en PDokument186 Seiten1756 Um523 - en PMohamed ShebaNoch keine Bewertungen
- American Wire Gauge Conversion ChartDokument2 SeitenAmerican Wire Gauge Conversion ChartiedmondNoch keine Bewertungen
- PLC 4Dokument24 SeitenPLC 4iedmondNoch keine Bewertungen
- Connecting To Allen-BradleyDokument16 SeitenConnecting To Allen-Bradleycjutp86Noch keine Bewertungen
- Logix Hot Backup SolutionsDokument2 SeitenLogix Hot Backup SolutionsiedmondNoch keine Bewertungen
- Courseware Sample by Lab-VoltDokument24 SeitenCourseware Sample by Lab-VoltiedmondNoch keine Bewertungen
- Dasar Dasar PLCDokument65 SeitenDasar Dasar PLCAgie FernandezNoch keine Bewertungen