Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Tettex TTR 2796Dokument6 SeitenTettex TTR 2796Ilic NebojsaNoch keine Bewertungen
- 3-Eddy CuRRENT WORKSHOP 2016Dokument51 Seiten3-Eddy CuRRENT WORKSHOP 2016Asif Hameed100% (4)
- Material ASI4518R73V06Dokument3 SeitenMaterial ASI4518R73V06Antonio MorenoNoch keine Bewertungen
- Power Quality SolutionDokument40 SeitenPower Quality Solutionshankar ammantryNoch keine Bewertungen
- EE6504 Electrical Machines-II NotesDokument233 SeitenEE6504 Electrical Machines-II NotesPraba Mohana100% (2)
- 4.1 A 16GHz 41textkhz Textrms Frequency Error Background-Calibrated Duty-Cycled FMCW Charge-Pump PLLDokument3 Seiten4.1 A 16GHz 41textkhz Textrms Frequency Error Background-Calibrated Duty-Cycled FMCW Charge-Pump PLLSuyog DhakneNoch keine Bewertungen
- Installation Service 050 Hk1w Hk3wDokument116 SeitenInstallation Service 050 Hk1w Hk3wMihai IavorschiNoch keine Bewertungen
- Control Burner Electronics DeviceDokument31 SeitenControl Burner Electronics DeviceHasaan HussainNoch keine Bewertungen
- A-109 Stereo Amplifier Manual Parts ComparisonDokument6 SeitenA-109 Stereo Amplifier Manual Parts ComparisonOscar ZavaletaNoch keine Bewertungen
- OPP - Power Cable Seminar - (August 21, 2010) - FINALDokument108 SeitenOPP - Power Cable Seminar - (August 21, 2010) - FINALJheny B. Bayon100% (2)
- (6ep1332-4ba00) - Simatic PM 1507 24v 3a Stabilized Power SupplyDokument4 Seiten(6ep1332-4ba00) - Simatic PM 1507 24v 3a Stabilized Power SupplyRyan TorresNoch keine Bewertungen
- Mastercycler 5331 - 5334 Service Manual EnglishDokument82 SeitenMastercycler 5331 - 5334 Service Manual Englishbio100% (1)
- BS5467 PVC CableDokument1 SeiteBS5467 PVC CableJuan AdrianzenNoch keine Bewertungen
- 6.5.1 Earthing Systems Basic Constructional AspectsDokument16 Seiten6.5.1 Earthing Systems Basic Constructional AspectsbehnamatgNoch keine Bewertungen
- GM950 SMDokument34 SeitenGM950 SMChristianNoch keine Bewertungen
- Overview: 1.1 FeaturesDokument104 SeitenOverview: 1.1 FeaturesAhamed Shiraz ARNoch keine Bewertungen
- 151XST InstructionsDokument19 Seiten151XST InstructionsfraustovictorNoch keine Bewertungen
- Amphenol Amphe-EX Explosion-Proof Connector GuideDokument3 SeitenAmphenol Amphe-EX Explosion-Proof Connector GuideMarcos AneivaNoch keine Bewertungen
- SEL-2431 DNP3 Communications Options: Application Guide AG2014-32Dokument10 SeitenSEL-2431 DNP3 Communications Options: Application Guide AG2014-32ANDREA LILIANA BAUTISTA ACEVEDONoch keine Bewertungen
- 9.10. Ethernet Switch - 1783-BMS10CLDokument5 Seiten9.10. Ethernet Switch - 1783-BMS10CLOrpic OQNoch keine Bewertungen
- Loop Antennas LectureDokument68 SeitenLoop Antennas LectureMaira IslamNoch keine Bewertungen
- 01 ECE621 F17 IntroductionDokument24 Seiten01 ECE621 F17 IntroductionAhmed MaGdyNoch keine Bewertungen
- TransformerDokument2 SeitenTransformerMandeep SinghNoch keine Bewertungen
- Pwrsoc (Integration of Micro-Magnetic Inductors/Transformers With Active Semiconductors) For More Than Moore TechnologiesDokument8 SeitenPwrsoc (Integration of Micro-Magnetic Inductors/Transformers With Active Semiconductors) For More Than Moore TechnologiesKleon TriantafillidisNoch keine Bewertungen
- SJVNL Secondary Earthing Equipment-Welding Standard For Cross Connection PDFDokument1 SeiteSJVNL Secondary Earthing Equipment-Welding Standard For Cross Connection PDFbalwant_negi7520Noch keine Bewertungen
- Viscosity ManualDokument60 SeitenViscosity ManualJacqueline PoloNoch keine Bewertungen
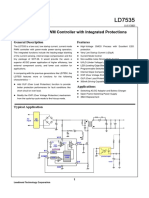
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDokument18 SeitenGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANNoch keine Bewertungen
- XTL2500 Detailed Service ManualDokument587 SeitenXTL2500 Detailed Service ManualJohnNoch keine Bewertungen
- Skyhook - Busport - Install - GuideDokument5 SeitenSkyhook - Busport - Install - GuidevbgiriNoch keine Bewertungen
- H@K & GSM Charging / Ignition NotesDokument21 SeitenH@K & GSM Charging / Ignition Notesdali2Noch keine Bewertungen