Das könnte Ihnen auch gefallen
- A-761E Manual PDFDokument107 SeitenA-761E Manual PDFsergNoch keine Bewertungen
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosVon EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosBewertung: 5 von 5 Sternen5/5 (1)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsVon EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsBewertung: 3.5 von 5 Sternen3.5/5 (6)
- Fanuc LATHE CNC Program Manual Gcodetraining 588Dokument104 SeitenFanuc LATHE CNC Program Manual Gcodetraining 588DOBJAN75% (12)
- Hydraulic Universal Testing MachineDokument9 SeitenHydraulic Universal Testing Machineleodegarioporral100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- National Locksmith - Oct 2005Dokument101 SeitenNational Locksmith - Oct 2005Benjamin DoverNoch keine Bewertungen
- DataKom 207 - USERDokument28 SeitenDataKom 207 - USERKhaleel KhanNoch keine Bewertungen
- Vortec 1.6LDokument183 SeitenVortec 1.6LDaniel CabralNoch keine Bewertungen
- Bul 36628Dokument13 SeitenBul 36628Γεωργια ΛεμενιτακηNoch keine Bewertungen
- MACCOY - PINZA - DE POTENCIA - HIDRAULICA - KT20-50K Tech ManualDokument198 SeitenMACCOY - PINZA - DE POTENCIA - HIDRAULICA - KT20-50K Tech ManualJavier Ramirez100% (1)
- CSWASample Exam 2010Dokument14 SeitenCSWASample Exam 2010Rich Mack100% (1)
- Ielts Listening Recent Actual Tests (2008-2013)Dokument124 SeitenIelts Listening Recent Actual Tests (2008-2013)lanternish100% (1)
- Kg-545 Automatic Mains Failure UnitDokument35 SeitenKg-545 Automatic Mains Failure UnitJack GehlotNoch keine Bewertungen
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsVon EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsBewertung: 3.5 von 5 Sternen3.5/5 (3)
- 509 - USER Datakom PDFDokument63 Seiten509 - USER Datakom PDFCarlos BarazarteNoch keine Bewertungen
- Powerful English Speaking - A.J.hogeDokument14 SeitenPowerful English Speaking - A.J.hogeSpongeBobLongPants50% (2)
- MasterCAM - X4 - Mill Training TutorialDokument101 SeitenMasterCAM - X4 - Mill Training TutorialRafael Donadio100% (6)
- DKG 509 - UserDokument56 SeitenDKG 509 - Userhackerland_1Noch keine Bewertungen
- CP30 - ManualMCI 70Dokument187 SeitenCP30 - ManualMCI 70Rajan Mullappilly89% (90)
- EsasDokument47 SeitenEsasLovelle Belaca-olNoch keine Bewertungen
- Using Sales and Operations PlanningDokument136 SeitenUsing Sales and Operations PlanningJose Lara100% (1)
- Dkg-307 Automatic Mains Failure and Remote Start UnitDokument29 SeitenDkg-307 Automatic Mains Failure and Remote Start UnitSalmaan HaiderNoch keine Bewertungen
- 7SR51 Overcurrent Protection Device Manual V2.31 PTBRDokument704 Seiten7SR51 Overcurrent Protection Device Manual V2.31 PTBRFabiano DominguesNoch keine Bewertungen
- MD10C Users ManualDokument12 SeitenMD10C Users ManualMahayudin SaadNoch keine Bewertungen
- User Manual SmartElex 15S DC Motor Driver 15A 30A PeakDokument14 SeitenUser Manual SmartElex 15S DC Motor Driver 15A 30A PeakRakesh KurhadeNoch keine Bewertungen
- MD30C User's ManualDokument17 SeitenMD30C User's ManualAMIR GHASEMINoch keine Bewertungen
- User Manual: MGC120 Petrol Genset ControllerDokument20 SeitenUser Manual: MGC120 Petrol Genset ControlleraltieresmirandaNoch keine Bewertungen
- DataKom 537 - USERDokument39 SeitenDataKom 537 - USERKhaleel KhanNoch keine Bewertungen
- Dkg-507 Automatic Mains Failure Unit: Canbus and Mpu VersionsDokument54 SeitenDkg-507 Automatic Mains Failure Unit: Canbus and Mpu VersionsFuqqi BhaiNoch keine Bewertungen
- DataKom 507 - J - USERDokument42 SeitenDataKom 507 - J - USERKhaleel KhanNoch keine Bewertungen
- 5210 ManualDokument4 Seiten5210 ManualBuck AbellaNoch keine Bewertungen
- Speed Control of BLDC Motor Using IPM and Micro 2812 Ver.2.0Dokument41 SeitenSpeed Control of BLDC Motor Using IPM and Micro 2812 Ver.2.0subbanna100% (1)
- Smart Gen AmericaDokument20 SeitenSmart Gen AmericaDenny KusumaNoch keine Bewertungen
- Dkg-517-J Automatic Mains Failure UnitDokument38 SeitenDkg-517-J Automatic Mains Failure Unitjose luis SerraNoch keine Bewertungen
- Dkg-507-J Automatic Mains Failure UnitDokument42 SeitenDkg-507-J Automatic Mains Failure UnitElsad HuseynovNoch keine Bewertungen
- User Manual: HGM6310D/6320D Auto Start ModuleDokument35 SeitenUser Manual: HGM6310D/6320D Auto Start ModuleVaam Group sasNoch keine Bewertungen
- Generator 307 USERDokument54 SeitenGenerator 307 USERLiviu PopaNoch keine Bewertungen
- L293D Motor Driver PDFDokument6 SeitenL293D Motor Driver PDFPedro Cu Aguirre100% (1)
- 309 UserDokument63 Seiten309 Userbatavia elektroNoch keine Bewertungen
- DKG 517 J Manual de UsuarioDokument38 SeitenDKG 517 J Manual de Usuarioenriquecourtadep100% (1)
- Deep Sea Electronics PLC: Model 520 Automatic Start ModuleDokument2 SeitenDeep Sea Electronics PLC: Model 520 Automatic Start ModuleLuis Francisco Calderon EspinozaNoch keine Bewertungen
- MD13S User-MannualDokument11 SeitenMD13S User-MannualDavidNoch keine Bewertungen
- BerniniDokument13 SeitenBerniniPanagiotis KarafillisNoch keine Bewertungen
- HVMotorCtrl PFCKit - HowToRunGuideDokument15 SeitenHVMotorCtrl PFCKit - HowToRunGuideRintuMathunniNoch keine Bewertungen
- Lab 2Dokument12 SeitenLab 2Malik YousafNoch keine Bewertungen
- 5110UL EngDokument2 Seiten5110UL EngAhmed Elsayed Abdel GhanyNoch keine Bewertungen
- Dkg-309 Automatic Mains Failure UnitDokument47 SeitenDkg-309 Automatic Mains Failure UnitjbalderramabNoch keine Bewertungen
- Vpet 106aDokument25 SeitenVpet 106aSpk SudhinNoch keine Bewertungen
- Datakom-Dkg 517Dokument39 SeitenDatakom-Dkg 517Hernan100% (2)
- G3612Dokument12 SeitenG3612Victor NunezNoch keine Bewertungen
- 175R5271 Rev1206 5000 Instruction ManualDokument238 Seiten175R5271 Rev1206 5000 Instruction ManualMariaMarriaNoch keine Bewertungen
- Datasheet - M542H Stepper Motor DriverDokument10 SeitenDatasheet - M542H Stepper Motor DriversthollanderNoch keine Bewertungen
- G 1 MG52A202 PDFDokument192 SeitenG 1 MG52A202 PDFCaspar HeerkensNoch keine Bewertungen
- Plasma TV: Service ManualDokument29 SeitenPlasma TV: Service ManualHristkiNoch keine Bewertungen
- BLDC Motor Speed Control With RPM DisplayDokument19 SeitenBLDC Motor Speed Control With RPM Displays.b.v.seshagiri1407Noch keine Bewertungen
- DKG 545 EnglishDokument49 SeitenDKG 545 EnglishrogerioNoch keine Bewertungen
- HPS2DN Digital Reduced Voltage Starter-New SerialDokument51 SeitenHPS2DN Digital Reduced Voltage Starter-New Serialasimasim123100% (2)
- LSA08 ManualDokument46 SeitenLSA08 ManualAbhinav Bhargava0% (1)
- Microcontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarDokument4 SeitenMicrocontroller Based DC Motor Control: Jayshree Sahu, S.K.Sahu, Jayendra KumarJagdish PatankarNoch keine Bewertungen
- SimplexMotionHubManual 02bDokument14 SeitenSimplexMotionHubManual 02benrique8herrera-10Noch keine Bewertungen
- AMF PanelDokument2 SeitenAMF PanelSudipto MajumderNoch keine Bewertungen
- MDD20A DatasheetDokument6 SeitenMDD20A DatasheetLeeNoch keine Bewertungen
- Supermodified - Miniature Controller For DC MotorsDokument38 SeitenSupermodified - Miniature Controller For DC MotorsGiovanni GambaNoch keine Bewertungen
- Ws5 9eDokument48 SeitenWs5 9ekrukinNoch keine Bewertungen
- Dkg-309 Automatic Mains Failure Unit: Canbus and Mpu VersionsDokument61 SeitenDkg-309 Automatic Mains Failure Unit: Canbus and Mpu VersionsKhaleel KhanNoch keine Bewertungen
- User Manual: Longo Motor Drive LMD-1 LMD-1.APC LMD-1.PWC LMD-1.TRCDokument14 SeitenUser Manual: Longo Motor Drive LMD-1 LMD-1.APC LMD-1.PWC LMD-1.TRCHamo HamoNoch keine Bewertungen
- DataKom 309J - USERDokument61 SeitenDataKom 309J - USERKhaleel KhanNoch keine Bewertungen
- 4axis USBCNC Manual tb60Dokument31 Seiten4axis USBCNC Manual tb60jeju233Noch keine Bewertungen
- DKG-307 InglesDokument54 SeitenDKG-307 InglesrogerioNoch keine Bewertungen
- DSE520Dokument3 SeitenDSE520abuzer1981Noch keine Bewertungen
- Optimal Sizing of Array and Inverter For Grid-Conn PDFDokument24 SeitenOptimal Sizing of Array and Inverter For Grid-Conn PDFMinh Trí KnightNoch keine Bewertungen
- Kinematics Kinematics: Assoc. Prof. Dr. TRUONG Tich ThienDokument2 SeitenKinematics Kinematics: Assoc. Prof. Dr. TRUONG Tich ThienMinh Trí KnightNoch keine Bewertungen
- 2210 Digital IO For Raspberry Pi Starter Kit Data SheetDokument6 Seiten2210 Digital IO For Raspberry Pi Starter Kit Data SheetMinh Trí KnightNoch keine Bewertungen
- Selection of Ball Screws 1Dokument4 SeitenSelection of Ball Screws 1Minh Trí KnightNoch keine Bewertungen
- FFTandMatLab Wanjun HuangDokument26 SeitenFFTandMatLab Wanjun HuangDiego PurizagaNoch keine Bewertungen
- PWG de enDokument12 SeitenPWG de enMinh Trí KnightNoch keine Bewertungen
- Spur Gear CalculatorDokument16 SeitenSpur Gear CalculatorMinh Trí KnightNoch keine Bewertungen
- Medias Sys Master 8798985682974 maxonMotorData Handouts - PDF Mime Application/pdf&realname maxonMotorData HandoutsDokument14 SeitenMedias Sys Master 8798985682974 maxonMotorData Handouts - PDF Mime Application/pdf&realname maxonMotorData HandoutsMinh Trí KnightNoch keine Bewertungen
- 10 Electromotoric Actuators For Double Clutch TransmissionsDokument17 Seiten10 Electromotoric Actuators For Double Clutch TransmissionsastranegroNoch keine Bewertungen
- MasterCAM - X4 - Design Training TutorialDokument48 SeitenMasterCAM - X4 - Design Training TutorialRafael DonadioNoch keine Bewertungen
- Tai Lieu Cosmos Full (Ta)Dokument218 SeitenTai Lieu Cosmos Full (Ta)Minh Trí KnightNoch keine Bewertungen
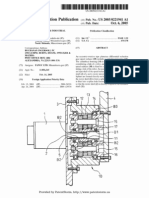
- Provided by Patentstorm, HTTP://WWW - Patentstorm.UsDokument10 SeitenProvided by Patentstorm, HTTP://WWW - Patentstorm.UsMinh Trí KnightNoch keine Bewertungen
- Core8051 DsDokument41 SeitenCore8051 DsMinh Trí KnightNoch keine Bewertungen
- Core8051 DsDokument41 SeitenCore8051 DsMinh Trí KnightNoch keine Bewertungen
- 0807 Total SolutionDokument16 Seiten0807 Total SolutionMinh Trí KnightNoch keine Bewertungen
- Datasheet OsmcDokument2 SeitenDatasheet OsmcMinh Trí KnightNoch keine Bewertungen
- Vexta BLH SeriesDokument19 SeitenVexta BLH SeriesMinh Trí KnightNoch keine Bewertungen
- MC33887Dokument37 SeitenMC33887Mặt Trăng Lặng LẽNoch keine Bewertungen
- Dspic30F4011/4012 Data Sheet: High-Performance, 16-Bit Digital Signal ControllersDokument238 SeitenDspic30F4011/4012 Data Sheet: High-Performance, 16-Bit Digital Signal ControllersMinh Trí KnightNoch keine Bewertungen
- Phuongphaplamkhoe NaoDokument227 SeitenPhuongphaplamkhoe NaotranquangthuyNoch keine Bewertungen
- HP03SDokument7 SeitenHP03SMinh Trí KnightNoch keine Bewertungen
- Bollhoff Helicoil Plus 2Dokument49 SeitenBollhoff Helicoil Plus 2Ace Industrial SuppliesNoch keine Bewertungen
- Isp Flash Microcontroller Programme:8051 ProgrammerrDokument4 SeitenIsp Flash Microcontroller Programme:8051 ProgrammerrTol Man ShresthaNoch keine Bewertungen
- Cjoy Operator Terminal Hardware Module DescriptionDokument16 SeitenCjoy Operator Terminal Hardware Module Descriptionedi2805Noch keine Bewertungen
- 81bcc820a219dbe69a858024c89b249fDokument16 Seiten81bcc820a219dbe69a858024c89b249fhamza malikNoch keine Bewertungen
- Unit IV MPMCDokument206 SeitenUnit IV MPMCgayathriNoch keine Bewertungen
- Crawler 4 J InstallationDokument9 SeitenCrawler 4 J InstallationVipin TiwariNoch keine Bewertungen
- National Trisonic Aerodynamics FacilitiesDokument4 SeitenNational Trisonic Aerodynamics FacilitieshaivijayanandNoch keine Bewertungen
- Asus N550jk E-ManualDokument140 SeitenAsus N550jk E-Manualzlaja3011Noch keine Bewertungen
- Report FYP FinalDokument71 SeitenReport FYP FinalAnonymous vM2kH3KYcNoch keine Bewertungen
- 9800639-04E 8086 Famility Utilities Users Guide May82Dokument98 Seiten9800639-04E 8086 Famility Utilities Users Guide May82JuanI1983Noch keine Bewertungen
- Generics - QuestionsDokument28 SeitenGenerics - Questionscristi_pet4742Noch keine Bewertungen
- Using Your Time Wisely PDFDokument13 SeitenUsing Your Time Wisely PDFIon BulicanuNoch keine Bewertungen
- Lathe Feeding and Apron MechanismDokument22 SeitenLathe Feeding and Apron Mechanismadhees100% (2)
- Software Developer or Software Engineer or Computer Programmer oDokument3 SeitenSoftware Developer or Software Engineer or Computer Programmer oapi-77545596Noch keine Bewertungen
- Name Date Drawn Checked Eng Appr MGR ApprDokument1 SeiteName Date Drawn Checked Eng Appr MGR ApprLamHotNoch keine Bewertungen
- Lab Task For Assembly LanguageDokument7 SeitenLab Task For Assembly LanguageRaheem AhmadNoch keine Bewertungen
- TETRAPOL TPH700 Handportable RadioDokument4 SeitenTETRAPOL TPH700 Handportable RadioFavre Alvarez VillagranNoch keine Bewertungen
- CCNA ExamDokument17 SeitenCCNA ExamPhuong PhamNoch keine Bewertungen
- FpartsDokument3 SeitenFpartsCastillo HectorNoch keine Bewertungen
- ION Setup Users GuideDokument124 SeitenION Setup Users Guidetnaris2004100% (2)
- AppStudio - Workshop - UserDokument80 SeitenAppStudio - Workshop - UserzamanNoch keine Bewertungen