Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Tyron Butson (Order #37627400)Dokument74 SeitenTyron Butson (Order #37627400)tyron100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
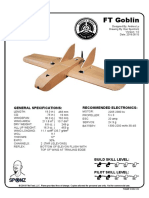
- FT Goblin Full SizeDokument7 SeitenFT Goblin Full SizeDeakon Frost100% (1)
- Metamorphic Rocks ImagesDokument7 SeitenMetamorphic Rocks Imagesapi-289985616100% (1)
- Chill - Lease NotesDokument19 SeitenChill - Lease Notesbellinabarrow100% (4)
- Entrepreneurship WholeDokument20 SeitenEntrepreneurship WholeKrizztian SiuaganNoch keine Bewertungen
- RectifiersDokument28 SeitenRectifiersMohamad SyazwanNoch keine Bewertungen
- CHOPPER CIRCUIT ANALYSISDokument1 SeiteCHOPPER CIRCUIT ANALYSISMohamad SyazwanNoch keine Bewertungen
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Dokument27 SeitenSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNoch keine Bewertungen
- Simulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Dokument27 SeitenSimulation of Three-Phase Harmonics Filter Mohd Fazruf Bin Mohd Afandi TK3101.M42 2005Mohamad SyazwanNoch keine Bewertungen
- Tutorial 2Dokument1 SeiteTutorial 2Mohamad SyazwanNoch keine Bewertungen
- Controller Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Dokument27 SeitenController Design of Boost Converter Mohd Hanafiah Bin Mohd Aripin TK2851.M42 2005Mohamad SyazwanNoch keine Bewertungen
- Lecture 7Dokument33 SeitenLecture 7Mohamad SyazwanNoch keine Bewertungen
- Pejovic Kolar Final 1Dokument8 SeitenPejovic Kolar Final 1Mohamad Syazwan100% (1)
- Muhd Halalluddin Bin Abdul Rahim 1Dokument40 SeitenMuhd Halalluddin Bin Abdul Rahim 1Mohamad SyazwanNoch keine Bewertungen
- CH4Dokument55 SeitenCH4Mohamad SyazwanNoch keine Bewertungen
- Experiment 5 Lab Report Uitm Malaysian CollegeDokument16 SeitenExperiment 5 Lab Report Uitm Malaysian CollegeFaris Muhammad0% (1)
- Tutorial 1Dokument2 SeitenTutorial 1Mohamad SyazwanNoch keine Bewertungen
- L12 Single Phase Uncontrolled RectifierDokument22 SeitenL12 Single Phase Uncontrolled Rectifierapi-19951707100% (1)
- EE 410 Lab1 Fall10-1305411901Dokument27 SeitenEE 410 Lab1 Fall10-1305411901Mohamad SyazwanNoch keine Bewertungen
- c2Dokument29 Seitenc2Mohamad SyazwanNoch keine Bewertungen
- Tutorial 5Dokument2 SeitenTutorial 5Mohamad SyazwanNoch keine Bewertungen
- Common Forms of BusinessDokument22 SeitenCommon Forms of BusinessPanda DutchNoch keine Bewertungen
- Guide 1Dokument2 SeitenGuide 1Saithila ThilaNoch keine Bewertungen
- Entrepreneurship Studies Chapter 1 1232804769353991 2Dokument26 SeitenEntrepreneurship Studies Chapter 1 1232804769353991 2fast nuNoch keine Bewertungen
- EntrepreneurshipDokument83 SeitenEntrepreneurshipRakeshh Bansi TalrejaNoch keine Bewertungen
- Tutorial 3Dokument2 SeitenTutorial 3Mohamad SyazwanNoch keine Bewertungen
- Fresh GraduateDokument2 SeitenFresh GraduateArin MuhammadNoch keine Bewertungen
- Lego Mindstorms Segway Project Report2Dokument8 SeitenLego Mindstorms Segway Project Report2Mohamad SyazwanNoch keine Bewertungen
- Chapter Four: 4.1 Project GoalDokument5 SeitenChapter Four: 4.1 Project GoalMohamad SyazwanNoch keine Bewertungen
- Assignment2 Solution 3rd EditionDokument4 SeitenAssignment2 Solution 3rd EditionMohamad SyazwanNoch keine Bewertungen
- DEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringDokument3 SeitenDEKA 1222 Calculus Group Assignment 2: Faculty of Electrical EngineeringMohamad SyazwanNoch keine Bewertungen
- Build an NXT Smart HouseDokument3 SeitenBuild an NXT Smart HouseMohamad SyazwanNoch keine Bewertungen
- Zener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Dokument5 SeitenZener Diode Power Supply Basics Electrics Devices and Circtuits CompE350Mohamad SyazwanNoch keine Bewertungen
- MachineDokument23 SeitenMachineMohamad SyazwanNoch keine Bewertungen
- Difference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDokument2 SeitenDifference Between OS1 and OS2 Single Mode Fiber Cable - Fiber Optic Cabling SolutionsDharma Teja TanetiNoch keine Bewertungen
- Diagnostic Information For Database Replay IssuesDokument10 SeitenDiagnostic Information For Database Replay IssuesjjuniorlopesNoch keine Bewertungen
- Pyrometallurgical Refining of Copper in An Anode Furnace: January 2005Dokument13 SeitenPyrometallurgical Refining of Copper in An Anode Furnace: January 2005maxi roaNoch keine Bewertungen
- Yamaha Nmax 155 - To Turn The Vehicle Power OffDokument1 SeiteYamaha Nmax 155 - To Turn The Vehicle Power Offmotley crewzNoch keine Bewertungen
- Legal Techniques (2nd Set)Dokument152 SeitenLegal Techniques (2nd Set)Karl Marxcuz ReyesNoch keine Bewertungen
- Defect Prevention On SRS Through ChecklistDokument2 SeitenDefect Prevention On SRS Through Checklistnew account new accountNoch keine Bewertungen
- CORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Dokument2 SeitenCORE Education Bags Rs. 120 Cr. Order From Gujarat Govt.Sanjeev MansotraNoch keine Bewertungen
- Victor's Letter Identity V Wiki FandomDokument1 SeiteVictor's Letter Identity V Wiki FandomvickyNoch keine Bewertungen
- Corruption in PakistanDokument15 SeitenCorruption in PakistanklutzymeNoch keine Bewertungen
- 2020-05-14 County Times NewspaperDokument32 Seiten2020-05-14 County Times NewspaperSouthern Maryland OnlineNoch keine Bewertungen
- Mini Ice Plant Design GuideDokument4 SeitenMini Ice Plant Design GuideDidy RobotIncorporatedNoch keine Bewertungen
- Queries With AND and OR OperatorsDokument29 SeitenQueries With AND and OR OperatorstrivaNoch keine Bewertungen
- Berry B Brey Part IDokument49 SeitenBerry B Brey Part Ikalpesh_chandakNoch keine Bewertungen
- EFM2e, CH 03, SlidesDokument36 SeitenEFM2e, CH 03, SlidesEricLiangtoNoch keine Bewertungen
- Top 35 Brokerage Firms in PakistanDokument11 SeitenTop 35 Brokerage Firms in PakistannasiralisauNoch keine Bewertungen
- Ralf Behrens: About The ArtistDokument3 SeitenRalf Behrens: About The ArtistStavros DemosthenousNoch keine Bewertungen
- People vs. Ulip, G.R. No. L-3455Dokument1 SeitePeople vs. Ulip, G.R. No. L-3455Grace GomezNoch keine Bewertungen
- Craft's Folder StructureDokument2 SeitenCraft's Folder StructureWowNoch keine Bewertungen
- MATH2070 Computer Project: Organise Porject FoldDokument4 SeitenMATH2070 Computer Project: Organise Porject FoldAbdul Muqsait KenyeNoch keine Bewertungen
- Operation Roman Empire Indictment Part 1Dokument50 SeitenOperation Roman Empire Indictment Part 1Southern California Public RadioNoch keine Bewertungen
- Law of TortsDokument22 SeitenLaw of TortsRadha KrishanNoch keine Bewertungen
- E-TON - Vector ST 250Dokument87 SeitenE-TON - Vector ST 250mariusgrosyNoch keine Bewertungen
- Philippine Architecture, Film Industry EvolutionDokument4 SeitenPhilippine Architecture, Film Industry EvolutionCharly Mint Atamosa IsraelNoch keine Bewertungen
- Model S-20 High Performance Pressure Transmitter For General Industrial ApplicationsDokument15 SeitenModel S-20 High Performance Pressure Transmitter For General Industrial ApplicationsIndra PutraNoch keine Bewertungen
- Jurisdiction On Criminal Cases and PrinciplesDokument6 SeitenJurisdiction On Criminal Cases and PrinciplesJeffrey Garcia IlaganNoch keine Bewertungen