Beruflich Dokumente
Kultur Dokumente
Motorisatios Et Commande Des Machines Electriques MCM
Hochgeladen von
bmmostefaCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Motorisatios Et Commande Des Machines Electriques MCM
Hochgeladen von
bmmostefaCopyright:
Verfügbare Formate
Dpartement TIN (Techniques industrielles)
Filires Microtechnique, lectronique Automatisation Industrielle, et Ingnierie de Gestion
Exercices
Motorisation et Commande des Machines
Bernard Schneider
www.iai.heig-vd.ch Copyright Bernard Schneider, 2009-2012
Yverdon-les-Bains, le 4 mai 2012
Motorisation et Commande des Machines
HEIG-VD
Lauteur remercie par avance toutes les personnes qui lui signaleront des erreurs ou lui proposeront des amliorations.
Copyright Bernard Schneider, 2009-2012
La copie de ce document, quelle quen soit la forme et le support, nest pas autorise sans laccord formel de lauteur. Par ailleurs, celui-ci ne prend aucune responsabilit relative des erreurs ventuelles du contenu, ni aux droits de reproduction de certaines des images utilises. Toutes propositions damliorations et de corrections seront les bienvenues.
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Table des matires
Chapitre 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 1.10 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3.1 3.2 3.3 3.4 4.1 4.2 4.3 4.4 4.5 4.6 4.7 Rducteurs et cinmatique..........................................................................................................5
tude dun dplacement .....................................................................................................................5 Rapport de rduction ..........................................................................................................................5 Rducteur pour lentranement de papier ...........................................................................................5 Question de quadrants ........................................................................................................................6 Train crmaillre..............................................................................................................................6 Calcul dun rducteur pour bande transporteuse ................................................................................7 Charge dun moteur avec crmaillre.................................................................................................7 Entranement dune vanne papillon ....................................................................................................8 Dcoupe de feuilles de papier.............................................................................................................8 Entranement du pied dun robot dassemblage .................................................................................9 Moteur DC................................................................................................................................10 Vitesse dun moteur DC vide et en charge ....................................................................................10 Caractrisation dun moteur DC par 2 essais ...................................................................................10 Rendement dun moteur DC.............................................................................................................10 Entranement dune perceuse ...........................................................................................................11 Freinage durgence dun moteur DC ................................................................................................11 Rgime transitoire de courant dans un moteur DC bloqu...............................................................12 Rgime transitoire de vitesse dun moteur DC.................................................................................12 Rgimes transitoires dun petit moteur DC 1 ................................................................................12 Rgimes transitoires dun petit moteur DC 2 ................................................................................13 Moteur synchrone .....................................................................................................................14 Moteur synchrone aliment frquence constante...........................................................................14 Moteur synchrone en rgime nominal ..............................................................................................14 Moteur DC et moteur synchrone ......................................................................................................14 Acclration dun servomoteur brushless ..................................................................................15 Moteur asynchrone ...................................................................................................................16 Ples et glissement dun moteur asynchrone....................................................................................16 Couple et vitesse dun moteur asynchrone .......................................................................................16 Moteur asynchrone utilis charge rduite ......................................................................................16 Moteur asynchrone en rgime de freinage .......................................................................................16 Moteur asynchrone 50 Hz et 60 Hz ............................................................................................17 Microcentrale hydraulique ...............................................................................................................17 Moteur asynchrone entranant une pompe .......................................................................................17 3
Chapitre 2
Chapitre 3
Chapitre 4
Copyright Bernard Schneider, 2009-12
Motorisation et Commande des Machines 4.8 5.1 6.1 6.2 6.3 6.4 6.5 6.6 7.1 7.2 8.1 8.2 8.3 8.4 8.5 8.6 8.7 8.8 9.1 9.2 9.3 9.4 9.5 9.6 9.7 9.8 9.9 9.10
HEIG-VD
Systme de bobinage ....................................................................................................................... 18 Autres moteurs ......................................................................................................................... 19 Choix dun entranement ......................................................................................................... 20 Calcul dune crmaillre pour moteur pas--pas ............................................................................. 19 Table tournante ................................................................................................................................ 20 Dimensionnement thermique dun servomoteur.............................................................................. 20 Validation thermique pour un moteur.............................................................................................. 21 Calcul de productivit ...................................................................................................................... 21 Entranement dune tourelle ............................................................................................................ 21 Entranement pour dcoupe de papier ............................................................................................. 22 Considrations dnergie et de puissance ................................................................................ 25 Puissance dalimentation et rsistance de freinage .......................................................................... 25 Calcul de la rsistance de freinage................................................................................................... 25 Profils de mouvements ............................................................................................................ 27 Dplacement optimal avec profil vitesse triangulaire...................................................................... 27 Dplacement optimal avec profil vitesse trapzodal ...................................................................... 27 Calcul du polynme 3-4-5 transition arrt arrt....................................................................... 27 Calcul du polynme 3-4-5 transition arrt vitesse fixe ............................................................ 28 Dplacement avec profil en polynme 3-4-5 ................................................................................... 28 Dchargeur de cartons ..................................................................................................................... 28 Influence du profil de mouvement sur le choix dun moteur .......................................................... 29 Influence du profil de mouvement sur lchauffement dun moteur ............................................... 29 Mouvements multiaxes ............................................................................................................ 31 Presse dcouper une bande ........................................................................................................... 31 Presse dcouper une bande cadence plus lente .......................................................................... 31 Presse dcouper une bande bande moins paisse....................................................................... 31 Dcoupe de carton ........................................................................................................................... 32 Poinonneuse 2 axes ..................................................................................................................... 32 Dcoupeuse Laser 2 axes .............................................................................................................. 33 Synchronisation dun esclave sur un matre rel ....................................................................... 34 Synchronisation dun esclave sur un matre virtuel ................................................................... 34 Couteau volant ................................................................................................................................. 34 Mise en phase dun axe esclave sur un matre ................................................................................. 35
Chapitre 5 Chapitre 6
Chapitre 7
Chapitre 8
Chapitre 9
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Chapitre 1
Rducteurs et cinmatique
1.1 tude dun dplacement
Une machine doit souder des crous (inserts) la distance D les uns des autres, sur une bande mtallique qui dfile vitesse constante V.
u v dispo so dur e
(t)
Pour chaque crou, le dispositif de soudure acclre pour tre synchrone avec la bande, reste cette vitesse pendant la dure tsoudure (dure de la soudure), puis sarrte. La valeur de lacclration est A. Le dispositif de soudure retourne alors son point de dpart, avec un profil de vitesse triangulaire, caractris par la mme acclration A. Valeurs numriques : V 0,5 m/s ; D 12 cm ; t soudure 75 ms ; A 24 m/s 2 a) De quelle distance se dplace le dispositif de soudure pendant chacun de ses dplacements aller ? b) Quelle est la dure du mouvement de retour, profil de vitesse triangulaire ? c) Quelle vitesse max. Vretour atteint-il pendant ce retour ? d) Quel est le temps disponible pour la saisie de lcrou suivant, entre le retour la position initiale et le dpart du nouveau cycle ?
1.2 Rapport de rduction
Un moteur tourne 1450 min-1 et entrane sa charge par lintermdiaire dune courroie crante. Le pignon sur le moteur compte 17 dents, celui sur la charge en compte 37. Quelle sera la vitesse vide de la charge ?
1.3 Rducteur pour lentranement de papier
On souhaite entraner du papier la vitesse de 190 m/min avec un cylindre de 20 cm de diamtre. La vitesse max. du moteur lectrique dentranement est de 3'200 tr/min. Quel rducteur proposez-vous ? Copyright Bernard Schneider, 2009-12 5
Motorisation et Commande des Machines
HEIG-VD
1.4 Question de quadrants
Un moteur lectrique doit quiper un convoyeur qui, toutes les 2 secondes, doit avancer de 50 cm. Expliquer dans quel(s) quadrant(s) il fonctionnera ? Quelles consquences faut-il en tirer pour le choix du rducteur et de laccouplement ?
1.5 Train crmaillre
Le chemin de fer crmaillre le plus raide au monde, qui mne au sommet du Pilatus prs de Lucerne, prsente une dnivellation de 1'629 m (diffrence daltitude entre la gare de dpart et la gare du sommet ). La pente moyenne est de 38%. La masse dun train est de 13,2 tonnes. Aliment la tension continue de 1,55 kV, il consomme une puissance lectrique (moyenne) la monte de 225 kW. Il parcourt tout le trajet en 40 minutes.
La crmaillre, assez particulire, a un pas de 6,35 cm, et les roues dentes comptent 15 dents chacune. a) Tenant compte de lnergie potentielle qui correspond llvation du train depuis la gare de dpart jusqu la gare du sommet, calculer le rendement de ce chemin de fer la monte. b) En admettant que le train descende la mme vitesse, et que tous les frottements et pertes de rendement soient identiques qu la monte, quelle nergie lectrique pourrait tre rcupre ? c) Dterminer la vitesse moyenne de rotation des roues dentes, en [rad/s]. d) En admettant que les frottements de ce rducteur soient nuls, et donc que son rendement soit de 100%, quel couple faut-il exercer sur chacune des deux roues dentes pour compenser exactement leffet de la gravitation sur le train, larrt ?
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
1.6 Calcul dun rducteur pour bande transporteuse
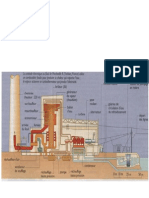
Une bande transporteuse est entrane par un moteur, par lintermdiaire dun rducteur (voir figure ci dessous). Les caractristiques sont les suivantes : Diamtre du tambour entranant la bande : = 250 mm Vitesse de la bande : v = 75 m/min Force de traction exerce par le tambour sur la bande : F = 2400 N Rendement du rducteur : R = 80% Vitesse nominale du moteur : NM nom = 1'455 tr/min Rendement du moteur : M = 87%
bande
tambour
a) Quel doit tre le rapport du rducteur entre le moteur et le tambour ? b) Le pignon ct moteur ayant 11 dents, combien de dents doit avoir le pignon ct tambour ? c) Quel est le couple que doit fournir le moteur ? d) Quel est la puissance lectrique absorbe par le moteur ?
1.7 Charge dun moteur avec crmaillre
La tte dimpression dune imprimante jet dencre est mue horizontalement par un entranement rotatif linaire de type pignon crmaillre. Lquipage mobile (tte et dispositif dentranement) pse 800 g et doit tre acclre 25 m/s2. La crmaillre un pas de 2,0 mm et le pignon dentranement compte 38 dents. Linertie du moteur est de 150 10-6 kgm2. a) Que vaut linertie quivalente de cette charge, rapporte au moteur. b) Quel est le couple moteur ncessaire pour acclrer cette charge (hypothses : frottements nuls).
Copyright Bernard Schneider, 2009-12
Motorisation et Commande des Machines
HEIG-VD
1.8 Entranement dune vanne papillon
Dans une machine demballage de ptes alimentaires, on utilise une vanne pour ouvrir et fermer lcoulement du produit dans les emballages. Cette vanne effectue des mouvements de 90, dans un sens puis dans lautre, selon le diagramme temps-vitesse ci-dessous. Elle est entrane par un servomoteur, par lintermdiaire dun rducteur, dont le rapport de rduction doit encore tre dtermin. L(t) L-max
tdpl
tarrt t
tdpl
tarrt tcycle
- L-max
Donnes numriques : dure des dplacements dure des arrts inertie de la vanne par rapport son axe de rotation : vitesse max. du moteur : inertie du moteur : nombre de dents du pignon ct moteur : inertie du rducteur : frottements : a) Quelle est la valeur max. du rapport de rduction ? b) Quelle est la valeur optimale du rapport de rduction ? c) Quels nombres de dents proposez-vous pour le pignon du rducteur, ct charge ? d) Quelle couple lectromagntique doit dlivrer le moteur pour raliser ces acclrations ? tdpl =212 ms tarrt = 88 ms JL = 0,0214 kgm2 NM-max = 1100 tr/min JM = 0,86 10-3 kgm2 ZM = 11 dents suppose ngligeable supposs ngligeables
1.9 Dcoupe de feuilles de papier
Un servomoteur de 4,9 Nm nominal peut tourner jusqu 4'500 tr/min. Son inertie vaut 6,3 kgcm2. Il entrane une charge rotative laide dun rducteur courroie crante. La charge doit constamment acclrer de 1370 tr/min 1830 tr/min, puis revenir 1'370 tr/min. Elle ne fait donc quacclrer et freiner, acclration constante. Son inertie est de 12,6 kgcm2. On suppose que tous les frottements sont ngligeables, et que le rendement du rducteur est de 100%, donc que le couple transmis par le moteur ne sert qu acclrer et freiner la charge, suivant son sens. 8 Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
(Application relle : Il sagit dune machine dcouper des feuilles de papier aux formats A4, A5, et lo ngueurs spciales. Celles-ci, imprimes en continu mais pas encore dcoupes, avancent vitesse constante. Un ciseau rotatif dcoupe chaque page la bonne longueur. Sa circonfrence est lgrement suprieure la longueur dune page. En ralit, pendant la dcoupe (env. 5% du tour), la vitesse tangentielle du ciseau rotatif doit tre gale celle du papier. Sur le reste du tour, il doit acclrer et freiner pour tre prt couper la page suivante au bon endroit. Pour ne pas trop compliquer cet exercice, on considre que la dcoupe est instantane.) a) Quelle limite du rapport de rduction est impose par les considrations de vitesse ? b) Quelle(s) limite(s) du rapport de rduction est impose par les considrations de couple ? c) Quelle est la valeur optimale du rapport de rduction ? d) Quel rapport de rduction choisir ? e) Est-ce que le moteur convient ?
1.10 Entranement du pied dun robot dassemblage
Dans un robot dassemblage, un servomoteur est utilis pour faire pivoter son pied autour de son ax e, par lintermdiaire dun rducteur. Caractristiques du mouvement du pied : La cadence de production de la machine est de 50'000 cycles/heure Chaque cycle commence par un dplacement point--point, suivi dun temps dattente larrt. Lallure du dplacement est acclration constante (profil de vitesse en forme de triangle isocle). Chaque dplacement dplace le disque de 1/16 de tour. Chaque dplacement dure 35 ms. Linertie de la charge (disque) vaut JL = 0,0023 kgm2. Les frottements de la charge sont considrs comme ngligeables. Linertie du servomoteur vaut JM = 0,78 10-3 kgm2. Les frottements lintrieur du moteur sont considrs comme ngligeables.
Caractristiques du servomoteur :
Caractristiques du rducteur : Le rapport de rduction correspond exactement au rapport optimal. Le rendement du rducteur est de 82% (suppos constant quelle que soit la vitesse et quel que soit le couple transmis, dans les 4 quadrants).
Questions : a) Dterminer la vitesse max. que le servomoteur doit pouvoir atteindre. b) Dterminer le couple que le servomoteur doit pouvoir fournir lors des acclrations. c) Dterminer le couple que le servomoteur doit pouvoir fournir lors des dclrations.
Copyright Bernard Schneider, 2009-12
Motorisation et Commande des Machines
HEIG-VD
Chapitre 2
Moteur DC
2.1 Vitesse dun moteur DC vide et en charge
Un moteur DC aimants permanents a comme caractristiques : kE = 50 V par 1000 tr/min kT = 0,48 Nm/A Ra = 0,9
Calculer la vitesse max. quil peut atteindre avec un variateur pouvant fournir au maximum 150 V DC : a) lorsquil est vide, en ngligeant les pertes internes par frottement ; b) lorsquil est charg son couple nominal de 5 Nm.
2.2 Caractrisation dun moteur DC par 2 essais
On souhaite caractriser un petit moteur DC aimants permanents. Pour ce faire, on procde 2 essais successifs : a) Le moteur est charg, larrt, par un couple de 0,105 Nm. Il est aliment par une source de 6,4 V, et on mesure son courant Ia = 910 mA. On suppose quil ny a aucun frottement significatif dans ces conditions. b) Le moteur vide est aliment par une source de 24 VDC. On mesure alors son courant Ib = 80 mA, et sa vitesse qui vaut 1'940 tr/min. Dans ces conditions, on ne peut pas ngliger les frottements. Dterminer sa rsistance Ra, sa constante de couple kT et sa constante de vitesse kE. Dterminer le couple de frottement interne Tfrott dans le cas b .
2.3 Rendement dun moteur DC
Quel est le rendement du moteur de lexercice prcdent (2.2), lorsquil est aliment 24 VDC et charg 0,105 Nm, et en tenant compte du couple de frottement interne Tfrott ?
10
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
2.4 Entranement dune perceuse
Un moteur courant continu est aliment par une source de tension de 12,0 V. Sa rsistance dinduit vaut 0,45 , sa constante de couple vaut 0,0890 Nm/A et sa constante de vitesse vaut 0,0890 Vs/rad. Il entrane un foret pour percer un trou, directement (donc sans rducteur), et vitesse constante. On a pu dterminer que, dans ces conditions, il consommait un courant constant de 2,64 A. a) Quelle est sa vitesse de rotation, en [tr/min] ? b) En admettant que les frottements lintrieur du moteur sont ngligeables, quel est la valeur du couple que le moteur transmet la mche ?
2.5 Freinage durgence dun moteur DC
Une machine comporte un moteur DC aimants permanents pour lentranement dune table. Il est aliment par un servo amplificateur, dont la tension de sortie UDC varie entre -130 V et +130 V pendant le fonctionnement normal de la machine. Le moteur est du type PARVEX RS640E. Ses caractristiques sont : Tnom = 13 Nm ; kT = 0,47 Nm/A ; kE = 49,2 [V / 1'000 tr/min] ; Ra = 0,12 ; JM = 0,0083 kgm2. Pour assurer larrt durgence en cas de panne, et plutt que dajouter un frein mcanique, on prvoit un dispositif permettant de court-circuiter ce moteur. Ce procd prsente lavantage de fonctionner mme si le servo amplificateur tombe en panne, ce qui amliore la scurit de la machine. Cependant, pour ne pas risquer dendommager le rducteur (vis bille), le couple de freinage ne doit en a ucun cas excder 3 fois le couple nominal du moteur. Pour limiter ce couple, on limite le courant de freinage en ajoutant une rsistance Rfrein dans le circuit durgence, comme reprsent ci-dessous. UDC
R
f
a) Quelle est la valeur max. laquelle le moteur peut tourner pendant le fonctionnement normal de la machine ? b) Quelle est la valeur max. que le courant peut atteindre au moment du freinage ? c) Quelle valeur ohmique proposez-vous pour la rsistance Rfrein , et pourquoi ?
Copyright Bernard Schneider, 2009-12
11
Motorisation et Commande des Machines
HEIG-VD
2.6 Rgime transitoire de courant dans un moteur DC bloqu
Un moteur (Maxon A-max 26/110209) est connect soudainement une alimentation de 12 V. Ses caractristiques sont les suivantes : Ualim = 12 V Inom = 629 mA Ra = 7,41 La = 0.77 mH therm = 12,4 s Tnom = 0,0157 Nm Jmot = 1,3 10-6 kgm2 Inertie de la charge : Jcharge = 3,9 10-6 kgm2 a) Considrant que le moteur est bloqu mcaniquement, exprimer et reprsenter le courant en fonction du temps. b) Combien de temps peut-on maintenir ce moteur ainsi aliment, avec son rotor bloqu, avant que sa temprature interne dpasse sa temprature limite de fonctionnement ?
2.7 Rgime transitoire de vitesse dun moteur DC
Courant tabli, on libre soudainement le moteur de lexercice prcdent. a) Dterminer les constantes kT et kE. b) Exprimer et reprsenter sa vitesse en fonction du temps, en ngligeant tous les frottements. c) Exprimer et reprsenter cette mme vitesse, mais en considrant quil y a en pl us un frottement visqueux B = 6,8 10-6 Nms/rad.
2.8 Rgimes transitoires dun petit moteur DC 1
On considre un petit moteur DC aimants permanents (type Maxon A-max 26/110211), caractris comme suit : Unom = 15 V Inom = 338 mA Ra = 25,8 La = 2,57 mH KT = KE = 0,0467 Nm/A Jm = 1,25 10-6 kgm2 therm = 12,4 s
Il entrane une charge inertielle pure, caractrise par Jext = 8 Jm . On nglige tous les frottements.
12
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Ce moteur est connect soudainement une alimentation de 15 V, et se met donc tourner. a) A quelle valeur sa vitesse se stabilisera-t-elle ? b) Quelle est la valeur du courant consomm par le moteur, lorsque la vitesse est ainsi stabilise ? c) Aprs combien de temps le moteur atteint-il une vitesse gale ou suprieure 2'000 tr/min ? d) Quel est le rapport, 5% prs, entre le courant de pointe absorb par le moteur au dbut du dmarrage, et son courant nominal ? Longtemps aprs que la vitesse se soit stabilise, et en maintenant la tension dalimentation constante, on freine ce moteur avec un couple inconnu, mais rigoureusement constant. On constate que sa vitesse diminue, et se stabilise nouveau. On mesure alors un courant de 450 mA. e) A quelle valeur la vitesse le moteur se stabilise-t-elle alors ? f) Quelle est la valeur du couple constant qui freine le moteur ? g) Pendant combien de temps peut-on le laisser fonctionner ce rgime sans risque ?
2.9 Rgimes transitoires dun petit moteur DC 2
Un petit moteur DC (Maxon, type A-max 236670) entrane une charge constitue uniquement dune roue. On considre que les frottements sont ngligeables. Il est non aliment, larrt, depuis longtemps. Les caractristiques du moteur sont les suivantes : Constante de couple du moteur : Constante de vitesse du moteur : Rsistance interne du moteur : Inductance du moteur : Inertie du moteur : 0,0461 Nm/A 0,0461 Vs/rad 7,17 0,953 mH 4,4 10-6 kgm2 13,2 10-6 kgm2 , et il
La charge est caractrise comme suit : Inertie de la roue : A linstant , on connecte le moteur subitement une alimentation de tension continue se met tourner.
a) Calculer les constantes de temps lectrique et mcanique. b) Expliquer en quelques mots pour quelle raison il est possible de ngliger leffet de linductance, lorsquon sintresse lvolution de la vitesse de ce moteur. c) Quelle est la vitesse du moteur linstant ? A cet instant prcis, on modifie la tension dalimentation, qui saute d) Combien de temps aprs le changement de tension (donc aprs valait-elle exactement zro ? .
) la valeur instantane de la vitesse
Copyright Bernard Schneider, 2009-12
13
Motorisation et Commande des Machines
HEIG-VD
Chapitre 3
Moteur synchrone
3.1 Moteur synchrone aliment frquence constante
quelle vitesse tourne un moteur synchrone aliment en 50 Hz, quip de 24 ples ?
3.2 Moteur synchrone en rgime nominal
Un moteur synchrone de puissance nominale 22 kW est aliment au rseau triphas europen 400 V / 50 H), et comporte 2 paires de ples (p = 2). Son rendement est de 92% et son cos vaut 0,87. Dterminer sa vitesse de rotation, son couple larbre, sa puissance active et son courant de phase.
3.3 Moteur DC et moteur synchrone
Un moteur synchrone, aliment par le rseau 400 V / 50 Hz / triphas, entrane directement un moteur DC. Ce dernier, fonctionnant en gnrateur, alimente une charge modlise par une rsistance de 50,0 . Donnes numriques : Puissance nominale ( larbre) : Vitesse nominale : Facteur de puissance (cos) du moteur synchrone : Rendement du moteur synchrone : Rendement du moteur DC : 0,8 kW 750 tr/min 0,88 94% 86%
Questions : a) Dterminer le courant lectrique consomm par le moteur synchrone lorsquil fonctionne exactement sa puissance nominale. b) Dterminer le nombre de ples du moteur synchrone. c) Dterminer le couple transmis par le moteur synchrone au moteur DC. d) Dterminer la puissance et le courant fournis par le moteur DC la rsistance.
14
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
3.4 Acclration dun servomoteur brushless
Un servomoteur synchrone aimants permanents AC brushless a une constante de couple kT = 1,02 Nm/Arms. Son courant nominal IN = 2,9 Arms. Son inertie JM = 3,3 kgcm2. A vide, et sans dpasser son couple nominal, combien de temps lui faut-il pour acclrer de 0 3'000 tr/min ?
Copyright Bernard Schneider, 2009-12
15
Motorisation et Commande des Machines
HEIG-VD
Chapitre 4
Moteur asynchrone
4.1 Ples et glissement dun moteur asynchrone
Un moteur asynchrone aliment en 50 Hz tourne 720 min-1. a) Calculer le nombre de ples et son glissement (en % de la vitesse synchrone). b) Quelle est la frquence des courants induits dans son rotor ?
4.2 Couple et vitesse dun moteur asynchrone
Soit un moteur asynchrone de 22 kW, dont la vitesse nominale est de 1420 tr/min. Son rendement est de 91%, et son facteur de puissance de 0,85. On lalimente en triphas 400 V 50 Hz. c) Quel est son glissement charge nominale ? d) Quel est son courant nominal ?
4.3 Moteur asynchrone utilis charge rduite
Le moteur de lexercice 4.2, aliment par le rseau triphas 400 V 50 Hz, entrane une charge vitesse constante en lui transmettant un couple de 55 Nm. a) quelle vitesse tourne-t-il ? b) En admettant que son rendement est le mme charge rduite qu pleine charge (91%), dterminer la puissance active quil consomme. c) En admettant que la puissance ractive est la mme charge rduite qu pleine charge ( puissance nominale), dterminer son courant de phase et son facteur de puissance. On en tire le glissement, exprim en [tr/min] : Tenant compte du rendement, la puissance lectrique active consomme vaut :
4.4
Moteur asynchrone en rgime de freinage
Le moteur de lexercice 4.2 est utilis pour un ascenseur. Quelle sera sa vitesse la descente ?
16
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
4.5 Moteur asynchrone 50 Hz et 60 Hz
La machine utilisant le moteur de l lexercice 4.2 doit tre exporte aux USA, et fonctionner sous 480 V / 60 Hz. Comment fonctionnerait le moteur dans ces conditions ? Que faire ?
4.6 Microcentrale hydraulique
Dans une microcentrale lectrohydraulique, un moteur asynchrone est entran directement par la turbine pour produire de lnergie lectrique. Avec un dbit deau constant, la vitesse de turbine est de 392 tr/min. Le moteur est connect au rseau industriel 400 V 50 Hz, triphas. a) Le champ tournant est-il plus grand, gal, ou plus petit que la vitesse de la turbine ? b) Quel nombre de ples est le plus favorable votre avis ? c) Quel est alors le glissement du moteur ? d) Quelle est la puissance lectrique fournie, sachant que lon mesure un courant de phase Irms = 12,5 A, et que le moteur est caractris par un facteur de puissance cos = 0,86 ? e) Quelle est le couple mcanique fourni par la turbine au moteur, sachant que le rendement du moteur est de 94%, et que la turbine tourne exactement 392 rpm ?
4.7 Moteur asynchrone entranant une pompe
Un chteau deau est aliment depuis une nappe phratique. La diffrence de niveau est de 67 m. Le dbit doit pouvoir atteindre au minimum 55 m3 par heure. Pour fournir ce dbit, la pompe doit tre entrane une vitesse de 690 tours par minute. Elle peut tourner plus vite, mais sans dpasser 900 tours par minute. Son rendement est de 81%. La pompe est entrane directement, donc sans rducteur, par un moteur asynchrone, lui-mme aliment directement par le rseau 400 V / 50 Hz / triphas. Il est caractris comme suit : Puissance et nombre de ples : dterminer Rendement identique pour tous les modles : 92% Facteur de puissance (cos) identique pour tous les modles : 0,84 Glissement couple nominal identique pour tous les modles : 4,5% a) Quel nombre de paires de ples convient le mieux, et pourquoi ? Valeurs possibles : 1, 2, 3 ou 4. b) Suite ce choix, quel est le dbit de la pompe ?
Copyright Bernard Schneider, 2009-12
17
Motorisation et Commande des Machines Hypothses simplificatrices :
HEIG-VD
Le dbit de la pompe est proportionnel sa vitesse. On admet que le glissement du moteur est gal son glissement nominal, mme si le couple quil fournit nest pas exactement gal son couple nominal. c) Quel doit tre la puissance nominale du moteur ?
Valeurs possibles (normalises) : 7,5 kW, 15 kW, 22 kW ou 37 kW d) Dans ces conditions de fonctionnement, quel est le courant de phase du moteur ?
4.8 Systme de bobinage
Une machine enroule du papier qui dfile la vitesse constante de 480 m/min. Le support vide du rouleau a un diamtre de 30 cm. Le rouleau plein a un diamtre de 1,1 m. Le rouleau est entran par un moteur et un rducteur. La vitesse du moteur est rgle en permanence pour garantir la vitesse constante du papier, tout en tirant celui-ci avec une force de 400 N. Le moteur est de type asynchrone 2 paires de ples. Le catalogue du fournisseur indique que les puissances nominales ( larbre) suivantes sont disponibles, en [kW] : 1,1 2,2 4,0 7,5 15 22 37. La vitesse nominale de tous ces moteurs est de 1'450 tr/min. Grce au variateur de frquence, il peut fonctionner jusqu 4 fois la vitesse nominale, avec une caractristique puissance constante au-del de sa vitesse nominale. Informations complmentaires : Le couple nominal du moteur, calcul en fonction de sa puissance et de sa vitesse nominales, ne doit en aucun cas tre dpass. On suppose que le rendement du rducteur est de 90% et quil ny a pas dautres pertes par frottements.
Questions : a) Quel est le plus petit des moteurs proposs qui permet dentrane r ce cylindre sans dpasser ses caractristiques nominales ? b) Quel rapport de rduction proposez-vous ? (Il y a plusieurs possibilits. Choisissez-en une et expliquez votre choix !) c) Faut-il tenir du couple ncessaire pour dclrer le rouleau lorsquil se remplit ?
18
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Chapitre 5
Autres moteurs
5.1 Calcul dune crmaillre pour moteur pas--pas
Un moteur pas pas est quip dun pignon pour entrainer une crmaillre, dont les dents sont distantes de 5 mm les unes des autres. Le moteur compte 180 pas par tour. On dsire pouvoir positionner la charge mobile linaire de millimtre en millimtre, aussi exactement que possible. Quel nombre de dents sur le pignon ct moteur proposez-vous, et pourquoi ?
Copyright Bernard Schneider, 2009-12
19
Motorisation et Commande des Machines
HEIG-VD
Chapitre 6
6.1 Table tournante
Choix dun entranement
On doit entraner la table dun nouveau centre dusinage avec un moteur lectrique par lintermdiaire dun rducteur. La table doit pivoter dun huitime de tour en 120 ms, puis rester larrt pendant la fin du cycle de travail de chaque pice. Le profil de vitesse est triangulaire (acclration constante), ce qui signifie que la vitesse du moteur augmente acclration constante pendant la moiti du temps, puis dcrot acclration constante - pendant lautre moiti du temps. La machine doit produire la cadence de 7'000 pices lheure. Linertie des masses en rotation est de 0,28 kgm2. On souhaite utiliser cet effet un moteur DC aimants permanents PARVEX RS640E. Ses caractristiques sont : Tnom = 13 Nm ; Tmax = 26 Nm ; kT = 0,47 Nm/A ; Ri = 0,12 ; JM = 0,0083 kgm2. Son servo amplificateur peut lui fournir une tension max. de 130 V. On nglige ses frottements, ceux du rducteur et linertie de celui-ci. a) Quel rapport de rduction choisir ? b) Quelle marge y a-t-il entre le couple efficace ncessaire et le couple nominal du moteur ?
6.2 Dimensionnement thermique dun servomoteur
Daprs sa fiche technique, un moteur lectrique a un couple nominal de 15 Nm. On cherche motoriser un axe dune machine dimprimerie, qui doit faire un mouvement de va et vient en 200 ms, et ce 2 fois par s econde. Pendant le mouvement, le moteur fournit 24 Nm. Entre chaque mouvement, il ne fournit que 3 Nm. a) Est-ce que ce moteur convient pour cette application ? On suppose pour simplifier que le courant absorb par le moteur est directement proportionnel au couple fourni, et on ne considre que les chauffements que ce courant provoque par effet Joule. b) Quelle modification du cycle de charge proposeriez-vous pour que le moteur soit charg exactement sa valeur nominale ? c) Est-ce que la situation est diffrente si la surcharge ne durait que 2 minutes, rptitive toutes les 5 minutes ?
20
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
6.3 Validation thermique pour un moteur
Lentranement dune machine de production est quip dun servomoteur DC aimants permanents, de type MT52V8-87 (fabrication SEM), et effectue des dplacements dallure trapzodale. Le moteur est caractris comme suit : Tnom = 15 Nm kT = 9,82 Nm/A JM = 0,026 kgm2 Ra = 0,41 La = 2,0 mH
Linertie de la charge vaut JL = 0,016 kgm2 ; les frottements nuls ; lentranement est direct (pas de rducteur). Les dplacements sont caractriss comme suit : max = 42,7 rad/s tdpl = 280 ms tacc = tdc = 90 ms tcycle = 400 ms a) Quelle est la valeur du couple pendant lacclration ? b) Le moteur propos convient-il ? Justifiez la rponse.
6.4 Calcul de productivit
Un moteur a un couple nominal de 0,6 Nm. Il est utilis pour entraner un dispositif de vissage, le cycle de fonctionnement est le suivant: Le dmarrage dure 0,02 secondes et ncessite un couple de 1,2 Nm. Le moteur fonctionne ensuite 0,5 secondes pour visser avec un couple de 0,5 Nm. Puis il effectue le serrage pendant 0,2 secondes avec un couple de 1 Nm. Il reste alors dclench jusquau cycle suivant.
Combien de cycles peut-il effectuer en une heure sans surchauffer, en respectant une marge de scurit de 10% ?
6.5 Entranement dune tourelle
Une machine dassemblage comporte 8 stations, disposes en cercle autour dune tour elle verticale. Elles sont rparties rgulirement, tous les 45 degrs. Les pices traites sont charges sur la tourelle la station no 1, puis subissent diverses oprations aux stations 2 7, et sont finalement dcharges la station no 8. La tourelle qui tient ces pices pivote autour de son axe, de station en station, en 68 ms. Elle reste alors larrt pendant 132 ms pour permettre aux diverses oprations dtre effectues. Le profil de dplacement est du type acclration constante , ce qui signifie que la vitesse prsente une allure triangulaire au cours du temps, lacclration et la dclration ayant mme dure. Copyright Bernard Schneider, 2009-12 21
Motorisation et Commande des Machines
HEIG-VD
Linertie de cette tourelle est de 0,45 kgm2. On suppose que tous les frottements sont ngligeables. Par contre, lorsque la tourelle est larrt, la tourelle subit un couple perturbateur provoqu par les divers us inages, qui est estim 22 Nm. La tourelle est entrane par un moteur en prise directe (pas de rducteur), de fabrication ETEL, devant imprativement tre choisi parmi ceux qui figurent ci-dessous.
Type de moteur TMM Couple nominal [Nm] Inertie [kgm2]
0450-030 181 0,16
0450-050 286 0,26
0450-070 386 0,37
0450-100 530 0,53
0450-150 769 0,80
a) Reprsenter lallure de la vitesse et du couple moteur au cours du temps. b) Dterminer lequel de ces moteurs convient le mieux sur le plan thermique, en justifiant votre choix.
6.6 Entranement pour dcoupe de papier
On souhaite concevoir une machine pour couper en pages du papier pr imprim livr en rouleau.
Le papier est droul et entran vitesse constante. Il est amen entre 2 cylindres de coupe qui sont entrans vitesse ajustable par un servomoteur (couplage direct, sans rducteur). Lallure de la vitesse de ces cylindres comporte des corrections priodiques (1 par feuille dcoupe) comme le montre la figure cidessous :
Le temps de cycle vaut 60 ms, et la dure des corrections est de 20 ms. La vitesse des cylindres de coupe varie entre 1'800 et 2'600 tr/min. Linertie de ces deux cylindres ensemble, ramene au moteur, vaut 0,3 10-3 kgm2. 22 Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Pour diverses raisons plus logistiques que techniques, on a choisi pour M1 un moteur de type HRS115AB, dont les spcifications sont donnes ci-dessous. remarquer que la variante de bobinage (kT), correspondant aux diverses courbes de la figure couple-vitesse, nest pas encore dtermine.
Variante Tnom kT Jmot bobinage [Nm] [Nm/A] [kgm2] 64 88 130 180 260 3,7 3,7 3,7 3,7 3,7 0,75 1,02 1,53 2,1 3,03 0,2710-3 0,2710-3 RA [] 2,7 5,5 LA [mH] 15 28 60 114 240
0,2710-3 11,4 0,2710-3 23,6 0,2710-3 45,6
a) Quelle est la valeur du couple ncessaire pour acclrer et dclrer les cylindres de coupe pendant les corrections ? b) On value que lensemble des frottements dans lentranement de ces rouleaux correspond un couple constant de 0,9 N. Tenant compte du couple dacclration calcul ci-dessus, valuer le couple efficace Trms que le moteur doit tre capable de fournir. c) Quelle est la marge de couple du moteur choisi, en [%] de son couple nominal ? d) Reporter sur le diagramme couple-vitesse du moteur la zone de fonctionnement de ce moteur. (Il suffit de reporter les points de fonctionnement pour lesquels le couple est positif.) e) Choisir alors une variante de bobinage qui convienne, en supposant que lalimentation dont on dispose est exactement celle spcifie par le fabricant du moteur (560 V bus DC). f) Pour le moteur choisi, que doit valoir le courant pour obtenir lacclration ncessaire lors des co rrections ? g) Pour des raisons de logistique et de stock, lentreprise souhaiterait utiliser la variante 64 plutt que la variante choisie. Que deviendrait le courant dacclration du moteur ? Copyright Bernard Schneider, 2009-12 23
Motorisation et Commande des Machines
HEIG-VD
24
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Chapitre 7
Considrations dnergie et de puissance
7.1 Puissance dalimentation et rsistance de freinage
Un servomoteur et sa charge sont caractriss par : Nmax = 3'000 tr/min kT = 1 Nm/A Jtot = 0,0032 kgm2 Acclration de 0 Nmax en 100 ms. Vitesse constante pendant 300 ms, avec un couple de 4 Nm. Freinage en 100 ms. Arrt pendant 500 ms, avec un couple de maintien de 2 Nm. a) Calculer et reprsenter la vitesse, le couple et la puissance fournie par ce moteur pendant un cycle. b) Reprsenter la puissance fournie par lalimentation (rseau triphas 400 V / 50 Hz). c) Reprsenter la puissance de freinage que doit dissiper la rsistance de freinage. d) Quelle valeur ohmique doit avoir cette rsistance, sachant que le seuil denclenchement Useuil = 700 V ? e) Dans quelles limites faut-il choisir la puissance nominale de cette rsistance ?
Le cycle de travail de ce moteur est le suivant :
7.2 Calcul de la rsistance de freinage
Sur une machine de production, on doit raliser des dplacements point--point linaires dune amplitude de 33 cm en 440 ms, une fois dans un sens, une fois dans lautre sens. Le temps de cycle est de 1,6 s (pour un aller-retour). On utilise un rducteur de type pignon-crmaillre. La crmaillre a un pas de 2,5 mm. Lensemble des masses en mouvement linaire prsente une masse de 150 kg. Le moteur est de type DC (courant continu). Sa vitesse max. est de 3'000 tr/min. Son inertie est de 0,72 10-3 kgm2. Sa constante de couple est de 0,42 Nm/A. Le convertisseur qui entrane ce moteur est aliment partir dun rseau triphas 170 Vrms / 50 Hz par lintermdiaire dun simple redresseur (donc incapable de restituer lnergie de freinage au rseau triphas). On admet que le profil de vitesse est du type acclration constante (triangle isocle). On nglige toutes les pertes et frottements, ainsi que lnergie absorbe par le condensateur du bus DC. Le bus DC du servo amplificateur est quip dun condensateur de 470 F. Sa rsistance de freinage senclenche lorsque la tension du bus DC atteint 320 V. Copyright Bernard Schneider, 2009-12 25
Motorisation et Commande des Machines
HEIG-VD
a) Calculer la vitesse max. et lacclration max. de la charge, pour un profil acclration constante. b) Quelle est la valeur optimum du nombre de dents du pignon ? c) Quel doit tre le nombre de dents du pignon pour que ce moteur puisse raliser le dplacement souhait sans dpasser sa vitesse max. ? d) Quelle est alors la valeur du couple max. que le moteur doit pouvoir dlivrer ? e) Quelle est la valeur efficace (rms) de ce couple ? f) Tenant compte du fonctionnement cyclique et de la marge de scurit de 10%, quelle est la valeur minimum du couple nominal que doit offrir ce moteur ? g) Quelle est la valeur ohmique de la rsistance de freinage qui garantit que la tension du bus DC ne dpasse pas sa valeur de seuil ? h) Tenant compte que cette rsistance a une tolrance de 10%, et que lon est limit aux valeurs nominales de la gamme E6 (10, 15, 22, 33, 47, 68) quelle valeur choisiriez-vous ? i) Dans quelles limites faut-il choisir la puissance nominale de cette rsistance ?
26
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Chapitre 8
Profils de mouvements
8.1 Dplacement optimal avec profil vitesse triangulaire
Un servomoteur DC doit dplacer une charge dune distance X pendant le temps , en suivant un profil de vitesse triangulaire. Lacclration dure 1 , la dclration dure 3 . On considre que les pertes sont produites uniquement par la circulation du courant dans la rsistance dinduit (pas de frottements). a) Dterminer les rapports 1 / et 3 / pour lesquels ces pertes sont minimales. b) Pour le rapport ainsi dtermin, exprimer la vitesse max. Vmax, lacclration max. Amax, lacclration r.m.s. Arms, et les pertes thermiques dans le moteur, en fonction de la distance X et du temps . c) Exprimer la puissance mcanique max. Pmax que doit dlivrer le moteur.
8.2 Dplacement optimal avec profil vitesse trapzodal
Un servomoteur DC doit dplacer une charge dune distance X pendant le temps , en suivant un profil de vitesse trapzodal. Lacclration dure 1 , la phase vitesse constante dure 2 , et la dclration dure 3. On considre que les pertes sont produites uniquement par la circulation du courant dans la rsistance dinduit (pas de frottements). a) Dterminer les rapports 1 / , 2 / ,et 3 / pour lesquels ces pertes sont minimales. b) Pour les rapports ainsi dtermins, exprimer la vitesse max. Vmax, lacclration max. Amax, lacclration r.m.s. Arms, et les pertes thermiques dans le moteur Eohm, en fonction de la distance X et du temps . c) Exprimer la puissance mcanique max. Pmax que doit dlivrer le moteur.
8.3 Calcul du polynme 3-4-5 transition arrt arrt
On considre le polynme du 5me degr suivant : a) Calculer les 6 coefficients pour que le dplacement correspondant ait une amplitude de 1 [m], que la dure soit de 1 [s], et pour que la vitesse comme lacclration soient nulles au dmarrage comme larrive. b) Exprimer le polynme qui correspondrait un dplacement dallure identique de X [m] en [s]. c) Pour le polynme ainsi dtermin, exprimer la vitesse max. Vmax, lacclration max. Amax, en fonction de la distance X et du temps . Copyright Bernard Schneider, 2009-12 27
Motorisation et Commande des Machines
HEIG-VD
d) Exprimer galement lacclration r.m.s. Arms, et les pertes thermiques dans le moteur, en fonction de la distance X et du temps . e) Exprimer la puissance mcanique max. Pmax que doit dlivrer le moteur. f) Comparer ces rsultats avec ceux des lois de mouvement acclration constante (exercice 8.1) et bang-bang (exercice 8.2).
8.4 Calcul du polynme 3-4-5 transition arrt vitesse fixe
Un servomoteur DC doit effectuer plusieurs dplacements dune charge, en suivant imprativement des pr ofils en polynme 3-4-5. On considre que les pertes sont produites uniquement par la circulation du courant dans la rsistance dinduit (pas de frottements). Lun de ces dplacements consiste partir dune position arrte, pour parvenir la vitesse V 0 , aprs avoir parcouru la distance X , en un temps t . Dterminer les coefficients de ce polynme.
8.5 Dplacement avec profil en polynme 3-4-5
Un servomoteur DC doit dplacer une charge de 60 en 120 ms, en suivant un profil en polynme 3-4-5. On considre que les pertes sont produites uniquement par la circulation du courant dans la rsistance dinduit (pas de frottements). a) Exprimer la vitesse max. max, lacclration max. max, et lacclration r.m.s. rms. b) De combien de temps pourrait-on raccourcir la dure du dplacement en optant pour un profil acclration constant, tout en maintenant identique les pertes ohmiques dissipes dans le moteur ? c) Pour quelle raison ne peut-on pas vraiment profiter de ce gain de temps ?
8.6 Dchargeur de cartons
A la sortie d'une machine d'impression de carton ondul, un manipulateur saisit les flancs coups (les pages de carton) pour les empiler. quip de ventouses, il aspire les flancs un un lorsqu'ils sortent de la machine, les dplace de ct sur une distance D, puis les relche pour former une pile. Le manipulateur revient alors sa position initiale, dans le mme laps de temps, pour aspirer le flanc suivant, et ainsi de suite. L'entranement est constitu d'un servomoteur, qui entrane le manipulateur par un pignon et une crmaillre.
28
Copyright Bernard Schneider, 2009-2012
HEIG-VD Valeurs numriques : cadence de production : 5'400 flancs / heure ; distance D : 40 cm ; profil de dplacement : polynomial du 5me degr ; temps d'arrts pour saisir les flancs : 50 ms ; temps d'arrts pour relcher les flancs : 50 ms ; total des masses mobiles du manipulateur : 46 kg ; pas de la crmaillre : 3,18 mm ; nombre de dents du pignon : 33 ; couple nominal du moteur : 37,5 Nm ; inertie du moteur : 0,015 kgm2 ; frottements : ngligeables.
Motorisation et Commande des Machines
Ce moteur est-il correctement dimensionn sur le plan thermique ? Justifiez !
8.7 Influence du profil de mouvement sur le choix dun moteur
On considre lentranement de lexercice 6.6. Toutefois, au lieu deffectuer les corrections davance du papier avec un profil de vitesse acclration constante , on aimerait utiliser un profil en polynme 3-45 . a) Quelle est alors lacclration max. ncessaire ? b) Montrer sur le diagramme couple-vitesse que le moteur que vous avez choisi la question 2-B de de lexercice 6.6 convient malgr tout, ou au contraire quil est judicieux de choisir une autre variante de bobinage.
8.8 Influence du profil de mouvement sur lchauffement dun moteur
Sur une machine de production, on doit raliser des dplacements point--point linaires dune amplitude de 33 cm en 440 ms. Le temps de cycle est de 800 ms. On utilise un rducteur de type pignon-crmaillre. La crmaillre a un pas de 2,5 mm. Lensemble des masses en mouvement linaire prsente une masse de 150 kg. Le moteur est de type DC (courant continu). Sa vitesse max. est de 3'000 tr/min. Son inertie est de 0,72 10-3 kgm2. Sa constante de couple est de 0,42 Nm/A. Le convertisseur qui entrane ce moteur est aliment partir dun rseau triphas 170 V rms / 50 Hz par lintermdiaire dun simple redresseur (donc incapable de restituer lnergie de freinage au rseau triphas). a) Calculer la vitesse max. et lacclration max. pour un profil acclration constante. b) Calculer la vitesse max. et lacclration max. pour un profil en polynme 3-4-5.
Copyright Bernard Schneider, 2009-12
29
Motorisation et Commande des Machines Conseil :
HEIG-VD
Pour ce 2me profil, il est plus facile de partir des valeurs obtenues avec le 1er profil, et dutiliser les valeurs max. indiqus dans les diapositives du cours pour un dplacement normalis, comme facteurs de proportionnalit.
c) Supposant que lon utilise ce profil en polynme 3-4-5, quel doit tre le nombre de dents du pignon pour que ce moteur puisse raliser le dplacement souhait sans dpasser sa vitesse max. ? d) Quelle est alors la valeur du couple max. que le moteur doit pouvoir dlivrer ? e) Quelle est la valeur efficace (rms) de ce couple pendant la dure du dplacement ? f) Tenant compte du fonctionnement cyclique et de la marge de scurit de 10%, quelle est la valeur minimum du couple nominal que doit offrir ce moteur ?
30
Copyright Bernard Schneider, 2009-2012
HEIG-VD
Motorisation et Commande des Machines
Chapitre 9
Mouvements multiaxes
9.1 Presse dcouper une bande
Une presse est utilise pour dcouper des pices dans une bande mtallique fournie en rouleau. Elle doit travailler la cadence de 300 pices par minute. Louverture de la presse vaut 180, ce qui signifie que la dure du dplacement de la bande mtallique ne doit pas dpasser la moiti du cycle. La course de la presse est de 12 mm. La bande est entrane par un moteur de 6,7 Nm nominal, dont linertie vaut 0,7310 -3 kgm2, et la vitesse max. vaut 3'000 tr/min. Ce moteur entrane la bande par lintermdiaire dun cylindre de diamtre 22 mm. Les inerties de ce cylindre et de la bande, rapportes au moteur, sont estimes 2,310-3 kgm2. Lacclration max. de la bande est de 24 m/s2, limite au-del de laquelle ladhrence du cylindre sur la bande ne serait plus suffisante. a) Calculer la dure max. du dplacement de la bande. b) Calculer la vitesse max. atteinte pendant le dplacement, en tenant compte de lacclration max. donne plus haut. c) Calculer la distance parcourue par la bande pendant ce dplacement. d) Calculer le couple fourni par le moteur pendant lacclration, en supposant les frottements ngligeables. e) Calculer le couple r.m.s. et la marge pour ce moteur. f) Quelle est lpaisseur max. du ruban.
9.2 Presse dcouper une bande cadence plus lente
On considre la presse de lexercice prcdent. Reprendre les calculs de lexercice prcdent si la cadence est diminue 60 pices par minute.
9.3 Presse dcouper une bande bande moins paisse
On considre la presse des 2 exercices prcdents. Elle est cependant utilise pour dcouper de la bande de 2 mm dpaisseur, et lavance doit tre imprativement de 10 mm. On suppose que les inerties restent ide ntiques, et que les frottements sont toujours ngligeables. Dterminer quelle est la cadence max. possible. Copyright Bernard Schneider, 2009-12 31
Motorisation et Commande des Machines
HEIG-VD
9.4 Dcoupe de carton
Dans une machine demballage, le carton est aliment en rouleau. Il est droul, et passe sous une presse qui le dcoupe en morceaux prforms en vue de raliser des botes. La cadence de production est de 130 emballages par minute. Langle douverture de la presse est de 240. Lamene du carton est ralise comme suit : Il passe entre 2 cylindres qui lentranent par adhrence. Lun de ces cylindres est entran par un servomoteur, par lintermdiaire dun rducteur courroie crante. Le moteur est aliment par un amplificateur dcoupage, lui-mme aliment depuis le rseau triphas par un redresseur (non rversible). Lors de la dcoupe, le carton est larrt. Il est dplac entre chaque dcoupe, le profil de dplacement du carton tant acclration constante . Lacclration du carton est fixe . Le moteur (type HRS142G6-260S de SEM Ltd.) a un couple nominal de 21 Nm et un couple max. de 60 Nm. Sa vitesse max. est de 2'700 tr/min. Son inertie vaut 0,0022 kgm2. Il est quip dun pignon pour courroie crante, de 13 dents. On considre que le cylindre et le carton en mouvement ont une inertie de 0190 kgm2. Dans le cadre de cet exercice, que tous les frottements sont ngligeables, et que le rendement du rducteur est idal. a) De quelle distance le carton avance-t-il entre 2 dcoupes ? b) Sachant que le diamtre des cylindres est de 4,0 cm, quel rapport faut-il choisir pour le rducteur courroie crante ? c) Quelle est la marge de couple dont dispose le moteur ? d) Sachant que la rsistance de freinage est active lorsque posez-vous pour la rsistance de freinage ? , quelle valeur ohmique pro-
e) Quel rapport de rduction conviendrait si lon souhaitait utiliser un profil polynomial 3 -4-5, carton sans modifier la cadence de production ni lamplitude des dplacements alors ? f) Que deviendraient alors le couple max. ncessaires et la marge de couple ?
9.5 Poinonneuse 2 axes
Une poinonneuse permet la dcoupe de motifs divers dans une tle. La dcoupe est ralise par une presse, quipe de poinons et de contre-outils spcifiques pour chaque motif possible (ronds, carrs, fentes, etc.). La tle est entrane selon 2 axes orthogonaux X et Y dans un plan horizontal, de manire ce quelle soit positionne lendroit correct pour chaque dcoupe. La poinonneuse est caractrise comme suit : cadence en grignotage : course de la presse : paisseur max de la tle : pas de grignotage souhait : 420 coups/minute 12 mm 5 mm (+ 1mm de marge) 10 mm
32
Copyright Bernard Schneider, 2009-2012
HEIG-VD La motorisation de chacun des axes X et Y est la suivante :
Motorisation et Commande des Machines
rducteur : vis bille, au pas de 24 mm (1 seul filet) inertie de la vis et de la charge, rapporte au moteur : 6,4 10-3 kgm2 couple nominal du moteur : 14,3 Nm inertie du moteur : 3,2 10-3 kgm2 vitesse max. du moteur : 2'000 tr/min a) Calculer langle douverture de la presse et la dure max. des dplacements de la tle. b) Reprsenter lallure de la vitesse au cours du temps. c) Calculer le couple r.m.s. La marge est-elle suffisante ? d) Quel pourrait tre le pas de grignotage pour un dplacement X-Y 45 ? e) Quelle devrait-tre lpaisseur de la tle pour un pas (selon axe X) de 20 mm ?
9.6 Dcoupeuse Laser 2 axes
La table X-Y de lexercice prcdent est utilise pour positionner une tle sous un faisceau de dcoupe au Laser. La diffrence essentielle est que la tle doit bouger en permanence lors de la dcoupe (contrairement la poinonneuse, pour laquelle la dcoupe nest possible qu larrt de la tle). On souhaite faire une dcoupe dun rectangle de longueur 150 mm (selon X) et de largeur 10 mm (selon Y), les extrmits du rectangle tant arrondie (rayon 5 mm). Remarque : La longueur est mesure entre les centres des arrondis dextrmits. Ce genre de machine est soumis deux contraintes importantes : La vitesse de coupe dans les arrondis doit tre telle que les limites dacclration ne soient pas dpa sses. On suppose que le moteur est limit 1,5 fois son couple nominal. La tle ne doit en aucun cas tre arrte aux raccordements entre segments de droites et arcs de cercles, faute de quoi le Laser produirait un trou beaucoup trop grand ces endroits. a) Reprsenter et calculer lallure de la vitesse au cours du temps pour les 2 axes X et Y, en particulier dans les arrondis. b) Calculer les distances de ralentissement et dacclration. c) Calculer la dure de lusinage pour une dcoupe. Hypothse : On nglige le temps ncessaire pour lamorce et la fin de la dcoupe au Laser.
Copyright Bernard Schneider, 2009-12
33
Motorisation et Commande des Machines
HEIG-VD
9.7 Synchronisation dun esclave sur un matre rel
Un axe dune machine (esclave) doit tourner une vitesse synchronise sur un axe dune autre machine (matre). La position de laxe matre est ralise par un capteur incrmental caractris comme suit : Rsolution : Prcision : 16'000 points/tour 5 min. arc
Le dispositif de mesure et de traitement de linformation du capteur introduit un retard constant de 5 ms. On suppose que la rgulation de laxe esclave est idale, et nintroduit aucune erreur supplmentaire. a) Reprsenter la vitesse du matre et celle de lesclave au cours du temps, lorsque le matre acclre de 0 3'000 tr/min. b) Faire de mme pour variation de 1% de la vitesse de laxe matre. c) Quelle variation de vitesse (acclration) provoque un effet comparable lincertitude de mesure du capteur ? d) Que se passe-t-il lorsque laxe matre tourne trs lentement (par exemple, 1 tr/min) ?
9.8 Synchronisation dun esclave sur un matre virtuel
On suppose que lon peut modifier les 2 machines de lexercice prcdent, de manire ce que les 2 axes concerns soient entrans par la mme commande. De ce manire, les rgulateurs de position des 2 axes reoivent la mme consigne de position, calcule cycliquement 1 kHz. a) Que deviennent les carts entre les 2 axes, dans les situations de lexercice prcdent ? b) Que se passe-t-il si la position des axes nest pas chantillonne simultanment (par exemple, sil y a un cart constant de 300 s) ? c) Calculer la valeur max. de cet cart de synchronisation pour que lerreur ne dpasse pas 0,1 degr angulaire pour une vitesse de dfilement de 1'000 tr/min.
9.9 Couteau volant
On considre une machine dcouper des pages dans du papier introduit et imprim en rouleau. Le papier est ainsi entran la vitesse constante de 100 m/min. Le papier passe entre 2 rouleaux en acier, quips de lames, tournant en sens opposs, pour y tre dcoup un peu comme le feraient des ciseaux. Ces 2 rouleaux sont entrans par un servomoteur caractris comme suit : Couple nominal : Vitesse max. : Inertie du moteur : Entranement : 9,8 Nm 4'000 tr/min 0,7510-3 kgm2 direct (pas de rducteur)
34
Copyright Bernard Schneider, 2009-2012
HEIG-VD Les 2 cylindres sont caractriss comme suit : Dimensions : Matirre : Angle de coupe :
Motorisation et Commande des Machines
longueur 520 mm, diamtre 46,9 mm acier ( = 7,8 kg/dm3) 15 degrs
a) Reprsenter et calculer la vitesse au cours du temps, pour un pas de coupe (longueur dune page aprs dcoupage) de 5 pouces. b) Calculer linertie de la charge (attention : il y a 2 rouleaux !), en ngligeant leffet des pices daccouplement au moteur. c) Calculer la marge de couple du moteur. Montrer quelle est insuffisante. d) Quelle vitesse de coupe peut-on atteindre pour un pas de coupe correspondant A5 (14,85 cm), en maintenant une marge de couple de 10% ? e) Calculer le gain possible en introduisant un rducteur optimal entre le moteur et les rouleaux. f) Voyez-vous dautres manires daugmenter la cadence de production ?
9.10 Mise en phase dun axe esclave sur un matre
Une machine comporte 2 axes. Lun tourne en permanence la vitesse de 120 tr/min, et entrane un pignon de 229 dents. Lautre, qui entrane un pignon de 309 dents, est larrt au dbut du cycle de production, et doit pouvoir tre acclr et mis en phase avec le 1er axe, de manire pouvoir engrainer les 2 pignons. a) Sachant que le couple dacclration du 2me moteur est de 5 Nm, et que la somme des inerties quil entrane est de 0,01 kgm2, calculer le temps minimum pour amener le 2me axe de larrt la vitesse synchrone (profil acclration constante ). b) Quel est langle parcouru alors par ce 2me axe ? c) Quel est langle parcouru par laxe matre pendant lacclration de lesclave ? d) Que deviennent ces valeurs si laxe esclave est acclr selon un profil polynomial dordre 5 ? e) Que deviennent ces valeurs si laxe matre ne tourne qu 60 tr/min ? f) Comment calculer la consigne de laxe esclave si lon souhaite que langle dacclration de laxe esclave soit indpendant de la vitesse de laxe matre ?
Copyright Bernard Schneider, 2009-12
35
Motorisation et Commande des Machines
HEIG-VD
36
Copyright Bernard Schneider, 2009-2012
Das könnte Ihnen auch gefallen
- Ac-Dc 002Dokument2 SeitenAc-Dc 002bmmostefaNoch keine Bewertungen
- Capteur ISFETDokument71 SeitenCapteur ISFETLoubina100% (1)
- Cle THRMQDokument1 SeiteCle THRMQbmmostefaNoch keine Bewertungen
- Cours Cem CERGEDokument24 SeitenCours Cem CERGEbmmostefaNoch keine Bewertungen
- Actionneurs Corrige Exercices 1 18Dokument4 SeitenActionneurs Corrige Exercices 1 18bmmostefaNoch keine Bewertungen
- Cours Analyse D'erreursDokument15 SeitenCours Analyse D'erreursbmmostefaNoch keine Bewertungen
- Ac-Dc 002Dokument2 SeitenAc-Dc 002bmmostefaNoch keine Bewertungen
- Not OProfsDokument19 SeitenNot OProfsbmmostefaNoch keine Bewertungen
- Alimentation, Stabilisée, Régulée, À Découpage P3-3Dokument5 SeitenAlimentation, Stabilisée, Régulée, À Découpage P3-3bmmostefaNoch keine Bewertungen
- Ean02 A02 DiodesDokument22 SeitenEan02 A02 Diodeseto 03Noch keine Bewertungen
- Cours Analyse D'erreursDokument15 SeitenCours Analyse D'erreursbmmostefaNoch keine Bewertungen
- Cours VHDLDokument62 SeitenCours VHDLBrice Albin Fotso GhomdimNoch keine Bewertungen
- AUT12-Calcul Du Convertisseur AC-DC Avec Correction de Facteur de Puissance-ImpDokument5 SeitenAUT12-Calcul Du Convertisseur AC-DC Avec Correction de Facteur de Puissance-ImpbmmostefaNoch keine Bewertungen
- Cours 3 - FluxDokument8 SeitenCours 3 - FluxbmmostefaNoch keine Bewertungen
- Matière Et ConductionDokument7 SeitenMatière Et ConductionbmmostefaNoch keine Bewertungen
- Transfolegrand-La Protection Des Transformateurs Et de Leurs LignesDokument2 SeitenTransfolegrand-La Protection Des Transformateurs Et de Leurs LignesbmmostefaNoch keine Bewertungen
- Autopilot AgeDokument22 SeitenAutopilot Agehitmann47Noch keine Bewertungen
- Chap7 PrincipesaDokument9 SeitenChap7 PrincipesaIbrahima GueyeNoch keine Bewertungen
- Nouveau Document Microsoft WordDokument36 SeitenNouveau Document Microsoft WordImed Tuneur Pc MericheNoch keine Bewertungen
- AxemDokument12 SeitenAxembmmostefaNoch keine Bewertungen
- 2 Chapitre2Dokument25 Seiten2 Chapitre2abouloifaNoch keine Bewertungen
- Chang Eolienne FRDokument5 SeitenChang Eolienne FRcherif003Noch keine Bewertungen
- Commande Des Systemes LineairesDokument59 SeitenCommande Des Systemes LineairesNhân-Quý NguyễnNoch keine Bewertungen
- AxemDokument12 SeitenAxembmmostefaNoch keine Bewertungen
- Les Bascules E-QuestionsDokument4 SeitenLes Bascules E-QuestionsbmmostefaNoch keine Bewertungen
- Cours CombinatoireDokument14 SeitenCours Combinatoirebmmostefa100% (1)
- Ths04 Manguel.j Epfl Th3033Dokument235 SeitenThs04 Manguel.j Epfl Th3033bmmostefaNoch keine Bewertungen
- Forces MagnétiquesDokument11 SeitenForces MagnétiquesbmmostefaNoch keine Bewertungen
- Realisation CompensateurDokument45 SeitenRealisation Compensateurmohamed_89Noch keine Bewertungen
- Chap 3 Transmission IntegraleDokument4 SeitenChap 3 Transmission Integralemeziani100% (1)
- Huile de Boite 6012ADokument10 SeitenHuile de Boite 6012AFred FredyNoch keine Bewertungen
- Audi Q5 - Ensembles MécaniquesDokument50 SeitenAudi Q5 - Ensembles MécaniquesJOHNNY5377Noch keine Bewertungen
- CM - Variateurs de Vitesse MecaniquesDokument29 SeitenCM - Variateurs de Vitesse Mecaniquestarek05950% (2)
- Contrôle EngrenagesDokument7 SeitenContrôle EngrenagessahjNoch keine Bewertungen
- Boite de Vitesses Robotisee Sensodrive de c3Dokument5 SeitenBoite de Vitesses Robotisee Sensodrive de c3aymendabNoch keine Bewertungen
- NullDokument0 SeitenNullLiebherrNoch keine Bewertungen
- Introduction A La MecaniqueDokument48 SeitenIntroduction A La MecaniqueYoussef AmdNoch keine Bewertungen
- SSP 515 (La Golf 2013 - Trains Roulants Et Transmission Integrale)Dokument32 SeitenSSP 515 (La Golf 2013 - Trains Roulants Et Transmission Integrale)cms124d100% (1)
- Exam 2010 PresentationDokument20 SeitenExam 2010 PresentationRamzi MansouriNoch keine Bewertungen
- BTS CPI Juin 2000 Palan Eurochain VL5 - U41Dokument33 SeitenBTS CPI Juin 2000 Palan Eurochain VL5 - U41Kawther BenNoch keine Bewertungen
- Sciences de L'ingenieur SDokument22 SeitenSciences de L'ingenieur SLetudiant.frNoch keine Bewertungen
- Thèse EurocopterDokument203 SeitenThèse EurocopterjbcharpeNoch keine Bewertungen
- CLIO 3 - Equipement Electrique 2Dokument201 SeitenCLIO 3 - Equipement Electrique 2rabaryroger100% (10)
- Revue Technique Opel Astra G 98 Part05Dokument3 SeitenRevue Technique Opel Astra G 98 Part05John Do33% (3)
- Engrennage Ptsi Cours RappelsDokument33 SeitenEngrennage Ptsi Cours RappelsCéline LuttiNoch keine Bewertungen
- ElmachoptDokument264 SeitenElmachoptSandra PowersNoch keine Bewertungen
- DT Perforateur REXELDokument16 SeitenDT Perforateur REXELdianecortadesNoch keine Bewertungen
- X-ENS PSI 2011 (Sujet)Dokument22 SeitenX-ENS PSI 2011 (Sujet)SIRobSchuNoch keine Bewertungen
- TD 3 StatiqueDokument18 SeitenTD 3 Statiquefoufoua100% (1)
- 10 Transmission HydrostatiqueDokument3 Seiten10 Transmission HydrostatiquekldmntNoch keine Bewertungen
- Vespa PK 150WorkshopMan - PxDiscDokument148 SeitenVespa PK 150WorkshopMan - PxDiscJemNoch keine Bewertungen
- PassatDokument43 SeitenPassatAdil Chakrouni0% (1)
- SI STE Corrigé Session Normale 2011Dokument7 SeitenSI STE Corrigé Session Normale 2011El Idrissi HajarNoch keine Bewertungen
- LOGAN - Ambiance CA 1.5 DCi - 4Dokument7 SeitenLOGAN - Ambiance CA 1.5 DCi - 4Tariq BaadiNoch keine Bewertungen
- Rrsl0001fboite de VitesseDokument44 SeitenRrsl0001fboite de Vitesselulu3232Noch keine Bewertungen
- CVT CourroieDokument40 SeitenCVT Courroiepapouch13Noch keine Bewertungen
- Van Hool T915 AlicronDokument3 SeitenVan Hool T915 AlicronIsmahan Ochi Noro100% (1)
- TDR 125Dokument104 SeitenTDR 125Jules BoerezNoch keine Bewertungen