UNIVERSIDAD DE OVIEDO
E.T.S. INGENIEROS DE MINAS
Departamento de Matematicas
NOTAS RESUMIDAS
DE
C
ALCULO III
(2003-04)
0 1 2 3 4 5 6 7 8 9 10
4
3
2
1
0
1
2
3
4
Javier Vald
es
Indice general
1. Integrales curvilneas 1
1.1. Curvas regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Integral de un campo escalar a lo largo de una curva . . . . . . . . . . . . 4
1.3. Integral de un campo vectorial a lo largo de una curva . . . . . . . . . . . 6
1.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2. Integrales de supercie 11
2.1. Supercies regulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.
Area de una supercie regular . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3. Integral de supercie de un campo escalar . . . . . . . . . . . . . . . . . . 16
2.4. Integral de supercie de un campo vectorial . . . . . . . . . . . . . . . . . 17
2.5. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3. Teoremas Integrales del Analisis Vectorial 21
3.1. Teorema de Green-Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2. Teorema de Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3. Teorema de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4. Campos conservativos y campos de gradientes . . . . . . . . . . . . . . . . 24
3.4.1. Campos conservativos en R
3
. . . . . . . . . . . . . . . . . . . . . . 25
3.4.2. Campos conservativos en R
2
. . . . . . . . . . . . . . . . . . . . . . 26
3.5. Campos incompresibles y campos de rotores . . . . . . . . . . . . . . . . . 26
3.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4. Introducci on a las Ecuaciones Diferenciales 31
4.1. Modelizaci on matem atica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
i
ii
INDICE GENERAL
4.2. An alisis cualitativo, resoluci on analtica y resoluci on numerica . . . . . . . 33
4.3. Deniciones y clasicaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5. Ecuaciones Diferenciales de primer orden 37
5.1. Motivaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.2. Ecuaciones Lineales. Existencia y unicidad de soluci on. . . . . . . . . . . . 39
5.3. Ecuaciones no lineales. Existencia y unicidad de soluci on. . . . . . . . . . . 40
5.3.1. Variables separables . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.3.2. Ecuaciones exactas y reducibles a exactas . . . . . . . . . . . . . . 43
5.3.3. Ecuaciones homogeneas y reducibles a homogeneas . . . . . . . . . 45
5.3.4. Ecuaciones reducibles a lineales. Ecuaciones de Bernouilli y Ricatti 46
5.4. Ecuaciones aut onomas. An alisis cualitativo . . . . . . . . . . . . . . . . . . 48
5.5. Metodos aproximados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.5.1. Metodos gr acos. Campos de direcciones . . . . . . . . . . . . . . . 52
5.5.2. Aproximaciones sucesivas de Picard . . . . . . . . . . . . . . . . . . 53
5.5.3. Metodos numericos. Metodos de Euler y Runge-Kutta . . . . . . . . 55
5.6. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.6.1. Trayectorias ortogonales . . . . . . . . . . . . . . . . . . . . . . . . 65
5.6.2. Deterioro radioactivo . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.6.3. Eliminaci on de medicamentos . . . . . . . . . . . . . . . . . . . . . 67
5.6.4. Mec anica Elemental . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.6.5. Ley de enfriamiento de Newton . . . . . . . . . . . . . . . . . . . . 67
5.6.6. Interes compuesto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6. Ecuaciones diferenciales lineales de orden n 75
6.1. Motivaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.2. Ecuaciones lineales de segundo orden . . . . . . . . . . . . . . . . . . . . . 76
6.2.1. Soluci on general de la ecuaci on homogenea . . . . . . . . . . . . . . 78
6.2.2. Ecuaci on no homogenea . . . . . . . . . . . . . . . . . . . . . . . . 80
6.3. Vibraciones mec anicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6.3.1. Movimiento libre no amortiguado. Oscilador arm onico . . . . . . . . 83
6.3.2. Movimiento libre amortiguado . . . . . . . . . . . . . . . . . . . . . 84
INDICE GENERAL iii
6.3.3. Movimiento forzado no amortiguado . . . . . . . . . . . . . . . . . 87
6.3.4. Movimiento forzado amortiguado . . . . . . . . . . . . . . . . . . . 89
6.4. Ecuaci on lineal de orden n (n > 2) . . . . . . . . . . . . . . . . . . . . . . 90
6.4.1. Soluci on general de la ecuaci on homogenea . . . . . . . . . . . . . . 93
6.4.2. Ecuaci on no homogenea . . . . . . . . . . . . . . . . . . . . . . . . 95
6.5. Ecuaciones de Euler-Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . 96
6.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
7. Soluciones en serie de ecuaciones lineales 99
7.1. Motivaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.2. Ecuaci on lineal de segundo orden. Puntos ordinarios . . . . . . . . . . . . . 102
7.3. Puntos singulares regulares. Metodo de Frobenius . . . . . . . . . . . . . . 103
7.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
8. Transformada de Laplace 111
8.1. Motivaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
8.2. Denici on de la transformada de Laplace . . . . . . . . . . . . . . . . . . . 112
8.3. Propiedades de la transformada de Laplace . . . . . . . . . . . . . . . . . . 115
8.4. Transformada inversa de Laplace . . . . . . . . . . . . . . . . . . . . . . . 116
8.5. Funci on escal on unidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
8.6. Soluci on de problemas de valor inicial . . . . . . . . . . . . . . . . . . . . . 119
8.7. Funciones de impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
8.8. Transformaci on de funciones peri odicas . . . . . . . . . . . . . . . . . . . . 122
8.9. Convoluci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
8.9.1. Principio de Duhamel . . . . . . . . . . . . . . . . . . . . . . . . . . 124
8.10. Tabla de transformadas de Laplace . . . . . . . . . . . . . . . . . . . . . . 125
8.11. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
9. Sistemas de ecuaciones lineales de primer orden 129
9.1. Motivaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
9.2. Resultados de existencia y unicidad . . . . . . . . . . . . . . . . . . . . . . 131
9.3. Resoluci on de sistemas por eliminaci on . . . . . . . . . . . . . . . . . . . . 132
9.4. Sistemas lineales homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . 133
iv
INDICE GENERAL
9.5. Sistemas lineales no homogeneos . . . . . . . . . . . . . . . . . . . . . . . . 135
9.6. Sistemas lineales con coecientes constantes . . . . . . . . . . . . . . . . . 135
9.6.1. Sistemas homogeneos . . . . . . . . . . . . . . . . . . . . . . . . . . 135
9.6.2. Sistemas no homogeneos . . . . . . . . . . . . . . . . . . . . . . . . 141
9.7. Resoluci on de sistemas mediante transformada de Laplace . . . . . . . . . 142
9.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
10.Series de Fourier 147
10.1. Motivaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
10.2. Funciones peri odicas y series trigonometricas . . . . . . . . . . . . . . . . . 148
10.3. Serie de Fourier general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
10.4. Convergencia de una serie de Fourier . . . . . . . . . . . . . . . . . . . . . 150
10.4.1. Diferenciaci on de series de Fourier . . . . . . . . . . . . . . . . . . . 152
10.4.2. Integraci on de series de Fourier . . . . . . . . . . . . . . . . . . . . 153
10.5. Funciones pares e impares. Series de senos y cosenos . . . . . . . . . . . . . 153
10.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
11.E.D.P. y problemas de contorno 159
11.1. Motivaci on . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
11.2. Ecuaciones lineales de segundo orden . . . . . . . . . . . . . . . . . . . . . 160
11.3. Ecuaci on del calor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
11.3.1. Condiciones de contorno homogeneas . . . . . . . . . . . . . . . . . 161
11.3.2. Condiciones de contorno no homogeneas . . . . . . . . . . . . . . . 164
11.3.3. Barra con extremos aislados . . . . . . . . . . . . . . . . . . . . . . 166
11.4. Ecuaci on de ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
11.5. Ecuaci on de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
11.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
Bibliografa 175
Bibliografa
[1] P. Blanchard, R.L. Devaney, and G.R. Hall. Ecuaciones Diferenciales. International
Thomson Editores, Mexico, 1999.
[2] W.E. Boyce and R.C. DiPrima. Ecuaciones Diferenciales y Problemas con Valores en
la Frontera. Limusa, Mexico, 1996.
[3] M. Braun. Ecuaciones Diferenciales con Aplicaciones. Grupo Editorial Iberoamerica-
no, Mexico, 1990.
[4] S.L. Campbell and R. Haberman. Introducci on a las Ecuaciones Diferenciales. ISBN:.
McGraw Hill, Madrid, 1998.
[5] C.H. Edwards and D.E. Penney. Ecuaciones Diferenciales Elementales. Prentice Hall
Hispanoamericana, Mexico, 1985.
[6] A. Garca, F. Garca, A. Gutierrez, A. L opez, G. Rodrguez, and A. de la Villa. C alculo
II. Teora y Problemas de Funciones de varias variables. ISBN: 84-921847-0-1. CLAG-
SA, Madrid, 1996.
[7] J.E. Marsden and A.J. Tromba. C alculo Vectorial. Addison-Wesley Iberoamericana,
Delawere-U.S.A., 1991.
[8] R.K. Nagle and E.B. Sa. Fundamentos de Ecuaciones Diferenciales. Addison-Wesley
Iberoamericana, 1992.
[9] S.L. Ross. Introducci on a las Ecuaciones Diferenciales. Interamericana, Mexico, 1987.
175
Captulo 1
Integrales curvilneas
1.1. Curvas regulares
Vamos a introducir someramente conceptos de Geometra Diferencial de curvas. En lo
sucesivo nos referiremos a R
n
, considerando unicamente los casos n = 2 o n = 3.
Denici on 1.1.1 (Curva regular) Llamaremos curva regular, curva lisa o camino liso
a toda aplicaci on vectorial
: [a, b] R
n
tal que C
1
[a, b], y
(t) = 0, t [a, b].
El hecho de exigir
(t) = 0 supone, geometricamente, que en todo punto est a denida
la recta tangente.
Al conjunto = [a, b] R
n
se le llama imagen de la curva . Curvas distintas
pueden tener la misma imagen, por ejemplo las tres curvas siguientes tienen por imagen
la circunferencia de centro el origen y radio r.
(t) = (r cos t, r sen t), (t) = (r cos 2t, r sen 2t), (t) = (r cos t, r sen t), t [0, 2].
A cada punto x
0
(imagen de la curva) asociamos un espacio vectorial de dimensi on
1, que se llama espacio tangente en x
0
y que est a determinado por el vector tangente a
en x
0
= (t
0
):
T
x
0
= {
(t
0
) R
n
, R}.
Orientar el espacio vectorial T
x
0
es elegir en el una base, que se considera como positiva,
y orientar el arco es orientar el espacio tangente en cada uno de sus puntos. La
orientaci on can onica de T
x
0
consiste en elegir como base positiva la que forma el vector
tangente,
(t
0
), a en x
0
. La orientaci on can onica de consiste en orientar de esa manera
los espacios tangentes en todos los puntos de .
1
2 CAP
ITULO 1. INTEGRALES CURVIL
INEAS
Figura 1.1: Orientaci on de curvas
En la Figura 1.2 est an representadas las curvas anteriores con sus respectivas orienta-
ciones: y a la izquierda, y a la derecha.
Los puntos (a) y (b), correspondientes a los dos extremos del intervalo se dicen
extremos de la curva, En el supuesto (a) = (b), la curva se dice cerrada.
La curva se dice simple si es inyectiva en [a, b], es decir si no tiene puntos m ultiples.
Denici on 1.1.2 (Cambio de parametro) Dada la curva : [a, b] R
n
, cuya ima-
gen es
, hacer un cambio de par ametro signica considerar una nueva curva = h
donde h : [a
, b
] [a, b] es un difeomorsmo (aplicaci on biyectiva tal que h y h
1
son
de clase C
1
). Las curvas y se dicen equivalentes.
Dado que h es una biyecci on, las im agenes de ambas curvas coinciden, es decir
(s) = ( h)(s) = [h(s)] = (t), s [a
, b
], t [a, b].
Las curvas anteriores, y , tienen la misma orientaci on si h
(s) > 0 para todo
s [a
, b
] y orientaciones opuestas si h
(s) < 0. Necesariamente ha de ser h
(s) = 0, ya
que al ser h biyectiva ser a estrictamente creciente o estrictamente decreciente y, como es
de clase C
1
, h
(s) ser a, respectivamente, positiva o negativa.
La longitud de un arco de curva entre los puntos correspondientes a los valores
t = a y t = b se puede denir por un proceso de paso al lmite, de la longitud de una
poligonal. Consideremos una partici on
a = t
0
< t
1
< t
i1
< t
i
< < t
n
= b,
1.1. CURVAS REGULARES 3
Figura 1.2: Cambio de par ametro
y la poligonal generada por las im agenes de estos puntos (Ver Figura 1.3). La longitud de
la poligonal es
s
n
=
n
i=1
(t
i
) (t
i1
).
En el caso n = 3, si (t) = (x(t), y(t), z(t)) tenemos
s
n
=
n
i=1
x(t
i
) x(t
i1
), y(t
i
) y(t
i1
), z(t
i
) z(t
i1)
,
que, por aplicaci on del teorema del valor medio, podemos poner en la forma
s
n
=
n
i=1
(x
i
), y
i
), z
i
)) t
i
,
donde
i
,
i
,
i
(t
i1
, t
i
) e t
i
= t
i
t
i1
.
Es decir,
s
n
=
n
i=1
(x
i
))
2
+ (y
i
))
2
+ (z
i
))
2
t
i
.
Denimos la longitud del arco de curva como el lmite, si es que existe, de la sucesi on s
n
,
cuando n . Como x
, y
, z
son continuas podemos concluir que, de hecho, el lmite
existe y est a dado por
s = lm
n
s
n
=
b
a
(x
(t))
2
+ (y
(t))
2
+ (z
(t))
2
dt =
b
a
(t)
2
dt.
4 CAP
ITULO 1. INTEGRALES CURVIL
INEAS
Figura 1.3: Longitud de un arco de curva
Una curva : [a, b] R
n
se dice regular a trozos si existe al menos una partici on
a = t
0
< t
1
< t
2
< < t
n1
< t
n
= b tal que la restricci on de a cada subintervalo
[t
i1
, t
i
], i = 1, 2, n, es regular.
1.2. Integral de un campo escalar a lo largo de una
curva
Sea f : U R
n
R un campo escalar continuo y : [a, b] U una curva regular.
Se dene integral curvilnea de f a lo largo de la curva mediante la integral de Riemann
f ds =
b
a
f((t))
(t)
2
dt.
Es decir, se trata de calcular la integral de la funci on de una variable
g(t) = (f )(t)
(t)
2
sobre el intervalo [a, b].
1.2. INTEGRAL DE UN CAMPO ESCALAR A LO LARGO DE UNA CURVA 5
Figura 1.4: Interpretaci on de integral curvilnea de un campo escalar
Interpretaci on
Consideremos una partici on del intervalo [a, b],
a = t
0
< t
1
< t
2
< < t
n1
< t
n
= b,
que produce una descomposici on de
en trayectorias
i
= [t
i1
, t
i
]. Se sustituye
por una quebrada de vertices (t
0
), (t
1
), , (t
n
), y a cada segmento rectilneo
[(t
i1
), (t
i
)] se le asocia el valor f((
i
)), donde t
i1
<
i
< t
i
.
Vamos a evaluar las siguientes sumas y su paso al lmite cuando n
S
n
=
n
i=1
f((
i
)) (t
i
) (t
i1
).
En el caso U R
2
, teniendo en cuenta que
(t
i
) (t
i1
) = (
1
(t
i
)
1
(t
i1
),
2
(t
i
)
2
(t
i1
)) = (
1
(
i
) t
i
,
2
(
i
) t
i
),
donde
i
,
i
(t
i1
, t
i
), y por tanto
(t
i
) (t
i1
) =
1
(
i
)
2
+
2
(
i
)
2
t
i
,
se tiene
S
n
=
n
i=1
f((
i
))
1
(
i
)
2
+
2
(
i
)
2
t
i
.
6 CAP
ITULO 1. INTEGRALES CURVIL
INEAS
Denimos
S = lm
n
S
n
y se demuestra que S =
b
a
f((t))
(t)
2
dt =
f ds
Si
es un segmento rectilneo, que representa un trozo de alambre de longitud L =
(b) (a), y el campo escalar f constante, representa la densidad lineal, entonces la
masa del alambre viene dada por f L.
Si f no es constante y/o es una curva regular cualquiera, la suma S
n
ser a la masa de
la quebrada, que aproxima a
, y S la masa del alambre dado por
. Esta interpretaci on
es valida en R
2
o R
3
.
En el caso R
2
disponemos de otra interpretaci on alternativa: consideremos
una
curva plana y el campo escalar f tal que f(x, y) > 0 representa la altura de una valla
en el punto (x, y)
(Ver Figura 1.4). La suma S
n
representa la suma de areas de
rect angulos, que tiende al area S de la valla. Si f(x, y) = 1 la integral curvilnea ser a el
area de una valla de altura unidad, es decir la longitud de la valla
f ds =
b
a
(t)
2
dt = L.
Proposici on 1.2.1 (Cambio de parametro) Consideremos un campo escalar conti-
nuo f : U R
n
R y dos curvas equivalentes, : [a, b] U y : [a
, b
] U, cuya
imagen es
(ver Figura 1.2), entonces
f ds =
f ds
Dado que la integral no depende de la orientaci on es habitual considerar la notaci on
f ds =
f d
.
1.3. Integral de un campo vectorial a lo largo de una
curva
Sea F : U R
n
R
n
un campo vectorial continuo, : [a, b] U R
n
una
curva regular y
= [a, b]. Se dene la integral del campo F a lo largo de la curva , o
circulaci on del campo F a lo largo de la curva , como la integral de Riemann
F ds =
b
a
F ((t))
(t) dt,
donde indica el producto escalar eucldeo. Dicha integral tambien suele denotarse por
F d
F
1
dx
1
+ F
2
dx
2
+ + F
n
dx
n
1.3. INTEGRAL DE UN CAMPO VECTORIAL A LO LARGO DE UNA CURVA 7
Figura 1.5: Integral curvilnea de un campo vectorial
Interpretaci on
Si
es un segmento rectilneo y el campo F constante, el trabajo realizado por el
campo de fuerzas F a lo largo de
ser a
W = F [(b) (a)] = |G| (b) (a),
donde G = F u, con u vector unitario en la direcci on (b) (a).
Si F es un campo variable y/o es una curva regular cualquiera, la manera de proceder
sera la siguiente: consideramos una partici on del intervalo [a, b],
a = t
0
< t
1
< t
2
< < t
n1
< t
n
= b,
y la correspondiente poligonal sobre
. Si asociamos a cada segmento rectilneo
[(t
i1
), (t
i
)] el campo constante F((
i
)), donde t
i1
<
i
< t
i
, el trabajo realizado a lo
largo de la poligonal viene dado por
W
n
=
n
i=1
F((
i
)) [(t
i
) (t
i1
)],
que, en el caso bidimensional, se puede poner
W
n
=
n
i=1
(F
1
((
i
))[
1
(t
i
)
1
(t
i1
)] + F
2
((
i
))[
2
(t
i
)
2
(t
i1
)]) ,
8 CAP
ITULO 1. INTEGRALES CURVIL
INEAS
y, aplicando el teorema del valor medio, resulta nalmente
W
n
=
n
i=1
[F
1
((
i
))
1
(
i
) + F
2
((
i
))
2
(
i
)] t
i
,
donde
i
y
i
son puntos del intervalo (t
i1
, t
i
).
El trabajo realizado por el campo F a lo largo de la curva es, por denici on,
W = lm
n
W
n
=
b
a
F ((t))
(t) dt =
F ds.
Es preciso anotar que, aunque W
n
no son sumas de Riemann, debido a que
i
,
i
y
i
no
son necesariamente coincidentes, tambien convergen a la integral.
Se puede considerar tambien el caso de una curva regular a trozos o que F sea con-
tinuo y acotado salvo en un n umero nito de puntos. En ambos casos, se considera la
correspondiente partici on del intervalo [a, b], de tal manera que sobre cada subintervalo
[t
i1
, t
i
] la curva sea regular y F continuo
F ds =
n
i=1
t
i
t
i1
F ((t))
(t)dt.
Podemos relacionar la integral de un campo vectorial F con la de un campo escalar
adecuado f,
F ds =
b
a
F ((t))
(t) dt =
b
a
F ((t))
(t)
(t)
(t) dt,
de modo que si consideramos el campo escalar f tal que su restricci on a los puntos imagen
de la curva sea
f((t)) = F ((t))
(t)
(t)
resulta que
F ds =
f ds.
Proposici on 1.3.1 (Cambio de parametro) Consideremos un campo vectorial conti-
nuo F : U R
n
R
n
y dos curvas equivalentes, : [a, b] U y : [a
, b
] U,
cuya imagen es
(ver Figura 1.2), entonces
F ds =
F ds
seg un que y tengan la misma o distinta orientaci on.
Es decir, al contrario que en el caso de campos escalares, la circulaci on de un campo
vectorial a lo largo de una curva depende de la orientaci on de la misma.
1.4. EJERCICIOS 9
1.4. Ejercicios
1. Sea : [1, 1] R
2
la curva regular a trozos denida por (t) = (t, |t|), t
[1, 1] y sea f(x, y) = x
2
y. Calcular
fds.
[Resp.:
2
2
]
2. Calcular las siguientes integrales de lnea :
a)
x
2
ydx+(x
2
y
2
)dy desde (0, 0) hasta (1, 2) a lo largo de la par abola y = 2x
2
.
b)
(y x
2
)dx + xdy a lo largo de la lnea poligonal que une sucesivamente los
puntos (1, 0), (1, 1), (1, 1) y (1, 0).
3. Sea f(x, y) = 2x y, y considerar la curva (t) = (t
4
, t
4
), t [1, 1]. Calcular la
integral de f a lo largo de esta curva e interpretar geometricamente el resultado.
[Resp.:
2]
4. Calcular
dx + dy
|x| +|y|
donde es el contorno del cuadrado de vertices (1, 0), (0, 1), (1, 0) y (0,-1) recorrido
en sentido contrario al de las agujas del reloj. [Resp.: 0].
5. Calcular la circulaci on del campo
V =
1
2
(y
i + x
j) a lo largo de las curvas,
a)
x
2
a
2
+
y
2
b
2
= 1
b) arco de par abola y = x
2
entre (-1, 1) y (1,1)
[Resp.: ab;
1
3
]
6. Calcular
sen zdx + cos zdy (xy)
1
3
dz
siendo : [0, 7/2] U R
3
denida por (t) = (cos
3
t, sen
3
t, t)
[Resp.:
1
2
]
10 CAP
ITULO 1. INTEGRALES CURVIL
INEAS
7. Hallar el trabajo realizado por la fuerza f(x, y) = (x
2
y
2
)i + 2xyj al mover una
partcula en sentido contrario al de las agujas del reloj, recorriendo una vez el
contorno del cuadrado limitado por los ejes coordenados y las rectas x = a e y = a
con a > 0.
[Resp.: 2a
3
]
8. Calcular la integral curvilnea I =
ydx + 2xdy a lo largo de la curva , recorrida
en sentido positivo, que limita al dominio D denido como el lugar geometrico de
los puntos que satisfacen una al menos de las dos siguientes inecuaciones:
x
2
+ y
2
2x < 0 x
2
+ y
2
2y < 0
[Resp.: 3/2 + 1]
9. Un punto se mueve desde (0, 0) hasta (2a, 0) a lo largo de la semicircunferencia de
centro (a, 0) y radio a situada en el primer cuadrante. Sufre la acci on de una fuerza
F de magnitud constante igual a 2, cuya direcci on forma un angulo /4 con la parte
positiva del eje Ox. Encontrar el trabajo realizado por F.
[Resp.: 2a
2]
Captulo 2
Integrales de supercie
2.1. Supercies regulares
Pretendemos hacer una generalizaci on m as del concepto de integral e introducir la
integral de campos escalares y vectoriales sobre supercies, para lo cual veremos unas
breves nociones de estas.
Denici on 2.1.1 (Supercie regular) Una supercie parametrizada es una apli-
caci on : D R
2
R
3
continua, denida sobre un dominio D (abierto y conexo) de
R
2
,
(x, y, z) = (u, v) = (
1
(u, v),
2
(u, v),
3
(u, v)).
El conjunto imagen (D) = R
3
es la supercie imagen, o supercie correspondiente
a la funci on .
Una supercie se dice simple si es inyectiva.
Una supercie se dice regular si C
1
(D) y su jacobiano es de rango 2 en todo
punto de D o, equivalentemente, los vectores
u
y
v
son linealmente independientes en
todo punto de D.
Sea una supercie regular y = (D), tal como puede verse en la Figura 2.1. Fijado
v
0
, la curva
1
(u) = (u, v
0
) tiene una curva imagen sobre , cuyo vector tangente en el
punto (u
0
, v
0
) ser a
u
=
u
=
_
1
u
(u
0
, v
0
),
2
u
(u
0
, v
0
),
3
u
(u
0
, v
0
)
_
.
An alogamente jado u
0
, la curva
2
(v) = (u
0
, v) tiene por vector tangente en el punto
(u
0
, v
0
)
v
=
v
=
_
1
v
(u
0
, v
0
),
2
v
(u
0
, v
0
),
3
v
(u
0
, v
0
)
_
.
11
12 CAP
ITULO 2. INTEGRALES DE SUPERFICIE
Figura 2.1: Supercie regular
Como los vectores
u
y
v
son tangentes a dos curvas sobre la supercie en un punto y
es diferenciable en ese punto, dichas tangentes deben determinar el plano tangente a la
supercie en ese punto, es decir
u
v
debe ser normal a la supercie. Por tanto si es
regular, los vectores
u
y
v
, en cualquier punto de la supercie, deben ser linealmente
independientes, lo que asegura la existencia de plano tangente en todo punto. Por tanto la
regularidad de una supercie, geometricamente, signica la existencia de plano tangente
en cualquier punto.
Denici on 2.1.2 (Supercies equivalentes) Dos supercies regulares
: D R
2
R
3
, : R
2
R
3
,
se dicen equivalentes si existe un difeomorsmo H : D tal que = H.
En este supuesto (ver Figura 2.2) para todo (, ) se tiene
(u, v) = H(, ) = (H
1
(, ), H
2
(, )), (u, v) = (, ) = ( H)(, ),
con lo que la supercie imagen es la misma
= (D) = () =
. Es decir se trata
de una misma supercie imagen referida a dos parametrizaciones distintas.
Proposici on 2.1.1 (Invarianza del plano tangente) El plano tangente en un punto
de una supercie regular es independiente de la representaci on parametrica y los respec-
tivos vectores normales tienen la misma direcci on pero pueden tener sentidos opuestos.
2.1. SUPERFICIES REGULARES 13
Figura 2.2: Cambio de par ametro. Supercies equivalentes.
Consideremos las dos supercies equivalentes y anteriores. Aplicando la regla de
la cadena se obtiene
_
_
_
_
_
_
(, ) =
_
_
1
u
1
v
2
u
2
v
3
u
3
v
_
_
(H(, ))
_
H
1
H
1
H
2
H
2
_
(, ),
es decir
_
_
=
_
u
v
_
_
u
_
.
Por tanto, los vectores
, que caracterizan al plano tangente a la supercie en
el punto (, ), pertenecen al subespacio generado por
u
y
v
en el punto (u, v), que no
es otro que el plano tangente a la supercie en dicho punto.
Los respectivos vectores normales se denen de la siguiente manera
N
, N
=
u
v
.
La relaci on entre ellos viene dada por
N
= N
= N
J
_
u v
_
,
donde J indica el determinante jacobiano del difeomorsmo H. Dado que dicho jacobiano
o es positivo en todo punto de o es negativo, los vectores normales tendr an el mismo u
opuesto sentido.
14 CAP
ITULO 2. INTEGRALES DE SUPERFICIE
Orientaci on de supercies
Dada un supercie : D R
2
R
3
, todo cambio de par ametro es tal que el
jacobiano correspondiente tiene signo constante. Aquellas parametrizaciones tales que el
jacobiano es positivo diremos que son positivamente equivalentes a , y si el jacobiano
es negativo negativamente equivalentes.
En el conjunto de parametrizaciones de una supercie imagen , la relaci on posi-
tivamente equivalentees una relaci on de equivalencia, que da lugar a una partici on del
conjunto de parametrizaciones en dos clases: las parametrizaciones positivamente equiva-
lentes a y las negativamente equivalentes. Si estas dos clases son distintas, la supercie
se dice orientable, y en otro caso no orientable. Las supercies orientables tienen dos
caras, con sus respectivos vectores normales. Las supercies no orientables son supercies
patol ogicas, que tienen una sola cara como la cinta de M obius o la botella de Klein.
2.2.
Area de una supercie regular
Sea : D R
2
R
3
una supercie regular simple, K D un cerrado y = (K).
Se dene el area de como
__
K
u
(u, v)
v
(u, v)
2
dudv,
cuya existencia est a asegurada por ser K compacto y N =
u
v
continua sobre K.
Proposici on 2.2.1 (Independencia de la parametrizaci on) El area de es inde-
pendiente de la parametrizaci on.
Vamos a justicar el hecho de que el n umero obtenido como area de se corresponde
con la idea que tenemos de area. Supongamos, por simplicidad, que K es un rect angulo
y consideremos una partici on de K en rect angulos de la forma
R
ij
= [u
i
, u
i+1
] [v
j
, v
j+1
],
asociados a las particiones
a = u
0
< u
1
< u
2
< < u
n
= b,
c = v
0
< v
1
< v
2
< < v
n
= d,
tal como en la Figura 2.3.
En cada punto de la partici on de K, (u
i
, v
j
), aproximamos la aplicaci on , que en
general ser a no lineal, por la aplicaci on afn
ij
, desarrollo de Taylor de primer orden de
la funci on en (u
i
, v
j
)
2.2.
AREA DE UNA SUPERFICIE REGULAR 15
Figura 2.3:
Area de una supercie regular.
_
_
ij1
(u, v)
ij2
(u, v)
ij3
(u, v)
_
_
=
_
_
1
(u
i
, v
j
)
2
(u
i
, v
j
)
3
(u
i
, v
j
)
_
_
+
_
_
1
u
(u
i
, v
j
)
1
v
(u
i
, v
j
)
2
u
(u
i
, v
j
)
2
v
(u
i
, v
j
)
3
u
(u
i
, v
j
)
3
v
(u
i
, v
j
)
_
_
_
u u
i
v v
j
_
La imagen de R
ij
por es un paralelogramo curvo y por
ij
es un paralelogramo (ver
Figura 2.3) cuyo area es
u
(u
i
, v
j
) u
i
v
(u
i
, v
j
) v
j
2
.
La suma de las areas de todos los paralelogramos, correspondientes a los puntos de la
partici on ser a
A
n
=
n1
i,j=0
u
(u
i
, v
j
)
v
(u
i
, v
j
)
2
u
i
v
j
.
Se dene el area de la supercie imagen
K
como
A = lm
n
A
n
=
__
K
u
(u, v)
v
(u, v)
2
dudv.
Nota 2.2.1 (Aproximaci on del area de una supercie por escamas) La longi-
tud de un arco de curva se puede considerar como el lmite de poligonales inscritas, cuando
el di ametro de la partici on tiende a 0. En cambio, el area de una supercie no se puede
aproximar mediante paralelogramos inscritos (contraejemplo de Schwarz) sino que es pre-
ciso aproximarla mediante escamas.
16 CAP
ITULO 2. INTEGRALES DE SUPERFICIE
Ejercicio 2.2.1 Comprobar que si la supercie viene dada en la forma z = f(x, y) con
(x, y) D el area es
A() =
__
D
_
f
x
_
2
+
_
f
y
_
2
+ 1 dxdy =
__
D
dxdy
| cos |
,
siendo cos , cos y cos los cosenos directores del vector normal.
An alogamente si la supercie se puede poner en la forma x = g(y, z), con (y, z) D
A() =
__
D
dy dz
| cos |
.
Y, nalmente, si y = h(x, z), con (x, z) D
A() =
__
D
dxdz
| cos |
.
Ejercicio 2.2.2 (Supercies de revoluci on) Dada la funci on y = f(x), x [a, b],
comprobar que el area de la supercie de revoluci on engendrada al girar alrededor del eje
Ox es
A
x
= 2
_
b
a
|f(x)|
_
1 + [f
(x)]
2
dx,
y la obtenida al girar alrededor de Oy
A
y
= 2
_
b
a
|x|
_
1 + [f
(x)]
2
dx.
2.3. Integral de supercie de un campo escalar
Consideremos un campo escalar f : U R
3
R continuo, y sea una supercie
regular : D R
2
U R
3
con (D) = U. Se dene la integral del campo
escalar f sobre la supercie imagen como la integral doble de Riemann
_
f d =
__
D
(f )(u, v)
u
(u, v)
v
(u, v)
2
dudv.
Se comprueba que la integral es independiente de la parametrizaci on, por lo que es po-
sible hablar de integral de un campo escalar sobre la supercie imagen. Si f(x, y, z) = 1
obtenemos la f ormula del area obtenida anteriormente.
Interpretaci on
Si el campo escalar representa la densidad supercial, la integral de supercie de dicho
campo escalar sobre la supercie nos proporciona la masa de la supercie (al igual que la
masa de un alambre en el caso de integral curvilnea).
2.4. INTEGRAL DE SUPERFICIE DE UN CAMPO VECTORIAL 17
Aplicaciones
La masa de una supercie de material cuya densidad supercial es f(x, y, z), tal
como hemos dicho anteriormente, viene dada por
m =
_
f d,
y las coordenadas del centro de masa (o de gravedad) son
x
G
=
1
m
_
xf d, y
G
=
1
m
_
y f d, z
G
=
1
m
_
z f d.
2.4. Integral de supercie de un campo vectorial
Sea : D R
2
U R
3
una supercie regular, cuya supercie imagen es
= (D), y F : U R
3
R
3
un campo vectorial continuo en U. Se dene integral
de supercie del campo F sobre la supercie como la integral doble de Riemann
_
F d =
__
D
(F )(u, v) [
u
(u, v)
v
(u, v)] dudv.
Interpretaci on
Al igual que la integral de un campo vectorial a lo largo de una curva tena como
interpretaci on el trabajo de un campo sobre una partcula que se desplazaba por la curva,
en el caso de integral de un campo vectorial sobre una supercie representar a el ujo de
un uido a traves de dicha supercie. La orientaci on de la supercie da la direcci on en la
cual se mide el ujo.
Si F representa un campo de velocidades de un uido en movimiento, es conocido que,
si F es constante, el ujo de dicho uido a traves de una supercie plana compuesta por
un paralelogramo de lados a y b es F (ab), que representa el volumen del paraleppedo
de lados F, a y b. (Ver Figura 2.4).
Para el caso F variable y supercies regulares cualesquiera, el concepto de integral
de supercie permite generalizar esta idea. Sea D = [a, b] [c, d] y consideremos una
partici on que da lugar a rect angulos elementales R
ij
, cuya imagen es un paralelogramo
curvo S
ij
= (R
ij
) (ver Figura 2.3). Si
es la aproximaci on afn de en el punto (u
i
, v
j
),
S
ij
=
(R
ij
) es un paralelogramo de lados
u
(u
i
, v
j
) u
i
y
v
(u
i
, v
j
) v
j
.
Para cada i, j el ujo del uido a traves de (R
ij
), en la direcci on del campo, es
aproximadamente
F[(u
i
, v
j
)] [
u
(u
i
, v
j
)
v
(u
i
, v
j
)] u
i
v
j
.
18 CAP
ITULO 2. INTEGRALES DE SUPERFICIE
Figura 2.4: Flujo de un campo constante a traves de un paralelogramo.
El ujo a traves de todas las escamas ser a
A
n
=
n1
i,j=0
F[(u
i
, v
j
)] [
u
(u
i
, v
j
)
v
(u
i
, v
j
)] u
i
v
j
.
Por denici on, el ujo del campo F a traves de la supercie imagen es
lm
n
A
n
=
_
F d.
Proposici on 2.4.1 (Cambio de parametro) Si : D R
2
U R
3
y
: R
2
U R
3
son dos parametrizaciones equivalentes de una supercie imagen
, entonces
_
F d =
_
F d,
seg un que y tengan la misma o distinta orientaci on.
2.5. Ejercicios
1. Hallar el area de la parte de esfera unitaria cortada por el cono z
_
x
2
+ y
2
[Resp.: (2
2)]
2.5. EJERCICIOS 19
2. Calcular el area del helicoide
: (0, 1) (0, 2) R
3
dado por (, ) = ( cos , sen , ). [Resp.:
_
2 + lg(1 +
2)
_
]
3. Hallar el area interceptada en el paraboloide
z =
x
2
2a
+
y
2
2b
por el cilindro elptico
x
2
a
2
+
y
2
b
2
= 1
[Resp.:
2ab
3
[2
2 1]]
4. Se considera la porci on de supercie de paraboloide x
2
+ y
2
= 2 z, 0 z 2
a) Obtener el area.
b) Determinar las coordenadas del centro de gravedad geometrico.
c) Suponiendo que sobre la supercie se halla distribuida una materia con una
densidad que es proporcional, en cada punto, a la cota z del mismo, hallar la
masa total.
[Resp.:
13
3
,
_
0, 0,
111
130
_
,
37k
10
]
5. En una esfera se hace un hoyo cuyo eje es un di ametro de la misma. El vol umen del
s olido resultante est a dado por la integral
V = 2
_
2
0
_
3
0
_
4z
2
1
rdrdzd
a) Examinando la integral dada, determinar la radio del hoyo y el de la esfera.
b) Calcular el valor numerico de la integral.
c) Calcular el area de la supercie del citado s olido.
[Resp.: 1, 2; 4
3; 8
3 + 4
3]
6. Comprobar que la supercie
x =
1
_
y
2
+ z
2
1 x <
se puede llenar pero no pintar.
20 CAP
ITULO 2. INTEGRALES DE SUPERFICIE
7. El plano y +z = R divide a la supercie esferica x
2
+y
2
+z
2
= R
2
en dos casquetes.
Siendo el casquete de menor area, calcular
_
x
2
yzd [Resp.:
R
6
2
64
].
8. Calcular la integral del campo escalar f(x, y) = xy sobre la supercie esferica
x
2
+ y
2
+ z
2
= R
2
, correspondiente al primer octante. [Resp.: R
4
/3].
9. Sea S la porci on de supercie cilndrica x
2
+ y
2
= R
2
situada en el primer octante,
y limitada por el plano z = h.
a) Calcular la integral del campo escalar f(x, y, z) = xyz sobre S.
b) Calcular el ujo del campo F(x, y, z) = (0, 0, xyz) a traves de la cara externa
de S:
[Resp.:
h
2
R
3
4
; 0]
10. Calcular
_
S
dS
2az z
2
donde S es la parte de supercie x
2
+y
2
+(za)
2
= a
2
que queda dentro del cilindro
x
2
+ y
2
= ay, y bajo el plano z = a. [Resp.: a
2
/2].
11. Sea S la parte de cono z
2
= x
2
+ y
2
, 1 z 2 orientada por la normal exterior.
Calcular
_
s
F dS
donde F(x, y, z) = (x
2
, y
2
, z
2
). [Resp.:
15
2
].
12. Hallar el ujo del campo F(x, y, z) = (3xy
2
, 3x
2
y, z
3
) a traves de la cara externa de
la esfera unitaria. [Resp.:
12
5
].
13. Calcular la integral del campo F(x, y, z) = (1 2z, 0, 2y) a traves de la supercie
K =
_
(x, y, z) R
3
|2x + y + 2z = 4, x 0, y 0, z 0
_
[Resp.:
28
3
]
14. Calcular el ujo del campo F = x
3
i + y
3
j + z
3
k
a) A traves de la supercie total exterior del cono H
2
(x
2
+y
2
) = R
2
z
2
, 0 z
H.
b) A traves de la supercie lateral exterior del mismo cono.
[Resp.:
3R
4
H
10
+
3R
2
H
3
5
;
3R
4
H
10
2R
2
H
3
5
]
Captulo 3
Teoremas Integrales del Analisis
Vectorial
3.1. Teorema de Green-Riemann
Relaciona una integral de lnea a lo largo de una curva cerrada de R
2
con una integral
doble sobre la regi on que encierra dicha curva.
Teorema 3.1.1 (Teorema de Green-Riemann) Sea un campo vectorial de clase C
1
F : G R
2
R
2
, tal que F(x, y) = P(x, y)i + Q(x, y)j y D G un dominio tipo 3
cuya frontera es una curva D = cerrada, simple y regular orientada positivamente,
entonces se tiene
_
F d =
_
P dx +Qdy =
__
D
_
Q
x
P
y
_
dxdy.
Vectorialmente, se puede poner en la forma
_
F d =
__
D
(rot F) k dxdy,
ya que al ser F un campo plano, rot F =
_
0, 0,
Q
x
P
y
_
. [Ver Figura 3.1].
En realidad, el teorema de Green-Riemann se puede aplicar a regiones m as generales
que las contempladas en el enunciado. Simplemente, se descompone la regi on, que no es
de tipo 3, en varias que si lo son, de modo que se aplica el teorema a cada una de ellas.
La dicultad de la demostraci on del caso general consiste en probar que un subconjunto
D R
2
abierto y acotado, cuya frontera es una curva regular a trozos, simple y cerrada,
puede descomponerse siempre en una uni on nita o innita numerable de conjuntos de
tipo 1 o 2. Por ejemplo, si la regi on es un anillo como el de la Figura 3.2 limitado por las
21
22 CAP
ITULO 3. TEOREMAS INTEGRALES DEL AN
ALISIS VECTORIAL
Figura 3.1: Teorema de Green-Rieman.
Figura 3.2: Teorema de Green-Rieman. Regiones multiplemente conexas
3.2. TEOREMA DE STOKES 23
curvas
1
y
2
, se puede descomponer en varios subdominios y aplicar el teorema a cada
uno de ellos. Al sumar las integrales correspondientes, se concluye que se puede aplicar el
teorema al dominio completo, si las orientaciones de las curvas
1
y
2
son las indicadas
en la Figura (
1
orientaci on positiva y
2
negativa).
Corolario 3.1.2 El area limitada por una curva simple, cerrada y regular a trozos se
puede expresar como
A =
1
2
_
y dx +xdy.
3.2. Teorema de Stokes
Relaciona la integral de lnea de un campo vectorial a lo largo de una curva cerrada
de R
3
, , con una integral sobre una supercie cuya frontera es .
Teorema 3.2.1 (Teorema de Stokes) Sea D R
2
abierto y acotado, cuya frontera
D es una curva regular a trozos, cerrada y simple, : D U R
3
una supercie
simple regular de clase C
2
orientada positivamente, = (D) y = (D) la curva
frontera de con la orientaci on inducida por la de . Si F : U R
3
R
3
es un campo
vectorial de clase C
1
se tiene
_
(rot F) d =
_
F d.
Es decir, lo que asegura el teorema de Stokes es que la circulaci on del campo F a lo
largo de la curva cerrada coincide con el ujo del rotacional de F a traves cualquier
supercie limitada por si la orientaci on de esta es la inducida por la de la supercie.
[Ver Figura 3.2]
En realidad, el teorema de Stokes es una generalizaci on del de Green-Riemann al caso
tridimensional.
3.3. Teorema de Gauss
El teorema de Gauss o teorema de la divergencia relaciona el ujo de un campo
vectorial a traves de una supercie cerrada con una integral de volumen sobre el dominio
que encierra dicha supercie.
Teorema 3.3.1 (Teorema de Gauss) Sea F : U R
3
R
3
un campo vectorial de
clase C
1
y U una regi on tipo 4, cuya frontera es una supercie simple, regular y
con la orientaci on de la normal exterior, entonces se tiene
_
F d =
___
div F dxdy dz.
24 CAP
ITULO 3. TEOREMAS INTEGRALES DEL AN
ALISIS VECTORIAL
Figura 3.3: Teorema de Stokes.
Es decir, el ujo del rotacional de un campo vectorial a traves de una supercie cerrada
coincide con la integral triple de su divergencia sobre el dominio que encierra. (Ver Figura
3.4).
Tambien en este caso se puede aplicar el teorema a dominios m as generales.
Si se aplica el teorema de Gauss a un campo vectorial de la forma F = f g, donde
f y g son campos escalares se obtiene la llamada primera f ormula de Green. Hay una
segunda f ormula que es consecuencia de esta.
Corolario 3.3.2 (F ormulas de Green) Sea un dominio de R
3
cuya frontera es
una supercie regular a trozos y simple, g, f : R
3
R campos escalares de clase
C
2
, entonces se tiene
_
f g d =
___
(f
2
g +f g) dxdy dz,
_
(f g g f) d =
___
(f
2
g g
2
f) dxdy dz.
3.4. Campos conservativos y campos de gradientes
Un campo vectorial se dice conservativo si la integral sobre cualquier curva depende
unicamente de los extremos, es decir la integral sobre cualesquiera curvas que tengan los
mismos puntos extremos no vara.
3.4. CAMPOS CONSERVATIVOS Y CAMPOS DE GRADIENTES 25
Figura 3.4: Teorema de Gauss.
Denici on 3.4.1 (Funci on potencial) Sea F : U R
n
R
n
un campo vectorial de
clase C
1
. Una funci on escalar V : U R
n
R se dice funci on potencial, o potencial
escalar, de F si V = F.
Proposici on 3.4.1 Todas las funciones potenciales de un mismo campo vectorial F di-
eren en una constante.
Todo campo vectorial con funci on potencial es conservativo:
Proposici on 3.4.2 Sea U R
n
un abierto conexo, F : U R
n
un campo vectorial de
clase C
0
con funci on potencial, entonces F es conservativo.
3.4.1. Campos conservativos en R
3
Estamos interesados en caracterizar los campos vectoriales, en R
3
, que se pueden
escribir como un gradiente de alg un campo escalar, y que por tanto son conservativos.
Proposici on 3.4.3 (Caracterizaci on de campos conservativos en R
3
) Sea F un cam-
po vectorial de clase C
1
, denido en R
3
salvo quiz as en un n umero nito de puntos. Las
siguientes condiciones son equivalentes:
26 CAP
ITULO 3. TEOREMAS INTEGRALES DEL AN
ALISIS VECTORIAL
1. Para cualquier curva cerrada simple se tiene
_
F ds = 0.
2. Para cualesquiera curvas simples orientadas,
1
y
2
, que tengan los mismos extre-
mos se tiene
_
1
F ds =
_
2
F ds.
3. Existe una funci on escalar f tal que F = f, en los puntos donde est a denido F.
4. F = rot F = 0.
3.4.2. Campos conservativos en R
2
Todo funciona igual que en R
3
salvo que en el teorema de caracterizaci on se ha de
exigir F de clase C
1
en R
2
, o en alg un dominio, sin excepciones en ning un punto.
Proposici on 3.4.4 (Caracterizaci on de campos conservativos en R
2
) Sea F : U
R
2
R
2
, con U abierto y conexo y F = (P, Q) de clase C
1
en U.Las siguientes condi-
ciones son equivalentes:
1. Para cualquier curva cerrada simple se tiene
_
F ds = 0.
2. Para cualesquiera curvas simples orientadas,
1
y
2
, que tengan los mismos extre-
mos se tiene
_
1
F ds =
_
2
F ds.
3. Existe una funci on escalar f tal que F = f, en los puntos donde est a denido F.
4.
Q
x
=
P
y
.
La igualdad (f) = 0 nos dice que todo campo de gradientes es un campo
irrotacional, y por tanto conservativo.
3.5. Campos incompresibles y campos de rotores
Un campo vectorial F se dice incompresible si F = div F = 0.
3.6. EJERCICIOS 27
Proposici on 3.5.1 Sea F : U R
3
R
3
, con U abierto y conexo, un campo vectorial
de clase C
1
, tal que H = 0, entonces existe un campo F, de clase C
2
, tal que F = H.
Al campo F tal F = H se le llama potencial vector de H.
Se prueba que si F es un campo de clase C
2
se tiene (F) = 0, por lo que todo
campo de rotores es incompresible, y por tanto tiene asociado un potencial vector.
3.6. Ejercicios
1. Propiedades y relaciones entre gradiente, divergencia, rotacional y laplaciana:
a) Si el campo escalar f es de clase C
2
entonces (f) = 0, es decir el rotacional
de cualquier gradiente es nulo.
b) Si el campo vectorial F es de clase C
2
entonces (F) = 0.
c) (f +g) = f +g
d) (f) = f, para constante
e) (fg) = fg +gf
f )
_
f
g
_
=
gffg
g
2
, en los puntos donde g(x) = 0
g) (F +G) = F + G
h) (F +G) = F +G
i ) (F G) = (F )G+ (G )F +F (G) +G(F)
j ) (fF) = f F +F f
k) (F G) = G (F) F (G)
l ) (fF) = fF +f F
m) (F G) = F GG F + (G )F (F )G
n) (F) = ( F) F
n) (F F) = 2(F )F + 2F (F)
o) (fg) = fg +gf + 2(f g)
p) (f g) = 0
q) (fg gf) = fg gf
r) H (F G) = G (H F) = F (GH)
s) H
_
(F ) G
_
=
_
(H )G
_
F (H F)( G)
28 CAP
ITULO 3. TEOREMAS INTEGRALES DEL AN
ALISIS VECTORIAL
t) F (GH) = (F H)GH(F G)
2. Vericar el teorema de Green-Riemann en el plano, donde S es el anillo
S =
_
(x, y) R
2
|a
2
x
2
+y
2
b
2
_
y el campo vectorial F el siguiente :
1) F(x, y) =
_
y
_
x
2
+y
2
,
x
_
x
2
+y
2
_
2) F(x, y) =
_
y
x
2
+y
2
,
x
x
2
+y
2
_
3) F(x, y) =
_
x
x
2
+y
2
,
y
x
2
+y
2
_
3. Usar el teorema de Green-Riemann para demostrar que
_
C
+
y
x
2
+y
2
dx +
x
x
2
+y
2
dy
vale 0 si C
+
es una curva simple orientada y cerrada en R
2
{(0, 0)} que no encierra
el origen, y 2 si encierra el origen.
4. Evaluar
_
S
( F) dS, donde S es la supercie x
2
+ y
2
+ 3z
2
= 1, z 0 y
F = (y, x, zx
3
y
2
), suponiendo la normal dirigida hacia arriba. [Resp.: 2]
5. Vericar el teorema de Stokes para el hemisferio superior
z =
_
1 x
2
y
2
, z 0
y el campo vectorial radial F(x, y, z) = (x, y, z).
6. Sea S la supercie cilndrica con tapa, uni on de dos supercies S
1
y S
2
, donde
S
1
=
_
(x, y, z)|x
2
+y
2
= 1, 0 z 1
_
y
S
2
=
_
(x, y, z)|x
2
+y
2
+ (z 1)
2
= 1, z 1
_
Sea F(x, y, z) = (zx +z
2
y +x)i + (z
3
yx +y)j +z
4
x
2
k. Calcular
_
S
(F) dS.
[Resp.: 0]
7. Integrar F, F = (3y, xz, yz
2
) sobre la parte de la supercie 2z = x
2
+ y
2
debajo del plano z = 2, directamente y usando el teorema de Stokes. [Resp.: 20]
3.6. EJERCICIOS 29
8. Sea K la supercie triangular del plano 2x+y+2z = 4 en el primer octante, orientada
por la normal n = (2/3, 1/3, 2/3). Considerar el campo F(x, y, z) = (x
2
, 2xy+z
2
, y+
2z). Vericar el teorema de Stokes.
9. Calcular
_
y
3
dx+x
3
dyz
3
dz donde es la intersecci on de las supercies x
2
+y
2
=
1, x+y+z1 = 0, eligiendo como orientaci on de aquella tal que la curva proyecci on
sobre Oxy tiene orientaci on positiva. [Resp.:
3
2
]
10. Vericar el teorema de Gauss para F = (P, Q, R) = (x
2
y, x
2
2z
2
, 2yz) siendo V el
volumen limitado por los planos x = 0, y = 0, z = 0, x = 1, y = 1, z = 1.
11. Sea F(x, y, z) = (2xyz + sen x)i + x
2
zj + x
2
yk. Comprobar que es conservativo y
hallar una funci on potencial. [Resp.: f(x, y, z) = x
2
yz cos x +k]
12. Calcular la integral del campo vectorial
F(x, y, z) = (y
2
+z
2
)i + (z
2
+x
2
)j + (x
2
+y
2
)k
a lo largo de la curva intersecci on de x
2
+y
2
+z
2
2ay = 0, x
2
+y
2
2by = 0, para
z 0, 0 < b < a, con la orientaci on de la curva de tal manera que la supercie que
encierra tenga la orientaci on de la normal exterior. [Resp.: 2ab
2
].
13. Sea F(x, y, z) = (x z)i + (x
3
+ yz)j 3xy
2
k y S la parte de supercie c onica
z = 2
_
x
2
+y
2
, con z 0. Calcular el ujo del rotacional de F a traves de dicha
supercie. [Resp.: 12].
14. Un globo aerost atico tiene la forma de la porci on de elipsoide centrado en el origen,
de semiejes 2, 3 y 5 respectivamente, situada en el semiespacio z 1.
Los gases calientes escapan por la cubierta porosa con una velocidad que viene dada
por el campo V (x, y, z) = F donde F(x, y, z) = (yz
2
, 4xz, x
2
yz). Calcular el
vol umen de gas que pasa a traves de la supercie por unidad de tiempo. [Resp.:
432
25
].
15. Consideremos dos campos vectoriales de R
3
, F y G, de clase C
1
, y un campo escalar
g, denido en R
3
, de clase C
2
.
a) Comprobar que div(F G) = G rot F F rot G.
b) Sea un dominio R
3
limitado por una supercie regular cerrada , dada
por la ecuaci on g(x, y, z) = k =cte.. Demostrar que si F es una campo vectorial
normal a , se cumple
_
g rot Fd = 0
16. a) Denir integral curvilnea de un campo escalar. Comprobar la independencia
de la parametrizaci on.
30 CAP
ITULO 3. TEOREMAS INTEGRALES DEL AN
ALISIS VECTORIAL
b) Calcular el ujo del campo vectorial F(x, y, z) = (x
2
, y
2
, z
2
) a traves de la
supercie lateral del cono x
2
+y
2
z
2
= 0, 0 z 1, con la orientaci on de la
normal exterior.
Sugerencia: aplicar el teorema de Gauss al dominio limitado por el citado
cono y su tapa superior z = 1. [Resp.:
2
]
17. Calcular directamente y aplicando el teorema de Gauss, el ujo del campo vectorial
F(x, y, z) = (xz, 3xy, 2z)
a traves de la supercie que limita al s olido
V (x, y, z) =
_
(x, y, z) R
3
; x
2
+y
2
+z
2
4, z 0
_
,
considerando la orientaci on de la normal exterior. [Resp.:
20
3
]
18. Calcular, directamente o aplicando el teorema de Stokes, la circulaci on del campo
vectorial
F(x, y, z) = (y
3
, x
3
, z
3
)
a lo largo de la curva C, intersecci on del cilindro x
2
+y
2
= 1 y el plano x+y+z = 1,
considerando la orientaci on que corresponde al sentido contrario al que giran las
manecillas del reloj. [Resp.:
3
2
]
Captulo 4
Introducci on a las Ecuaciones
Diferenciales
4.1. Modelizaci on matematica
En este Captulo pretendemos dar una visi on, en terminos sencillos, del papel que jue-
gan las ecuaciones diferenciales en el campo que se conoce con el nombre de modelizaci on
(o modelaci on) matem atica.
Es conocido que muchas leyes del Universo se pueden expresar en el lenguaje de
las Matem aticas, y para resolver muchos problemas est aticos basta utilizar herramientas
propias del
Algebra. Sin embargo, los fen omenos naturales m as interesantes implican
cambios, y se describen mejor mediante ecuaciones que relacionen cantidades variables.
Dado que la derivada de una funci on y = f(x) respecto de la variable independiente x,
mide la tasa de cambio de la funci on f respecto de la variable x, parece natural que las
ecuaciones en las que intervienen derivadas sean las que describen el universo cambiante.
Una ecuaci on que contiene una funci on desconocida y una o m as de sus derivadas, se
llama ecuaci on diferencial.
El estudio de las ecuaciones diferenciales tiene como nes fundamentales la determi-
naci on de la soluci on cuando sea posible, y en otro caso el an alisis del comportamiento
cualitativo de la misma. En el contexto de la Ingeniera es muy conveniente, adem as, inci-
dir en la obtenci on de la propia ecuaci on, que describe una situaci on fsica. En particular,
se muestran algunos ejemplos que ilustran este proceso de traducir leyes en terminos de
ecuaciones diferenciales, (segunda ley del movimiento de Newton, ley de enfriamiento,
desintegraci on radioactiva, tasa de cambio con respecto al tiempo de una poblaci on P(t),
etc.). Fijemonos en este ultimo ejemplo : la tasa de cambio con respecto al tiempo de una
poblaci on P(t) con ndices constantes de nacimiento y mortalidad se puede considerar, en
casos simples, proporcional al tama no de la poblaci on. Es decir
dP
dt
= kP, k = cte.
31
32 CAP
ITULO 4. INTRODUCCI
ON A LAS ECUACIONES DIFERENCIALES
0 1 2 3 4 5 6
6
4
2
0
2
4
6
c=1
c=0.5
c=0
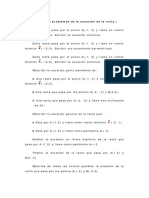
Figura 4.1: Soluciones de P
(t) = P(t)
En este caso toda funci on de la forma P(t) = Ce
kt
es una soluci on de esta ecuaci on
diferencial. Por tanto, cuando k sea conocida la ecuaci on diferencial tiene innitas solu-
ciones (una para cada C). Esto es caracterstico de algunas ecuaci ones diferenciales, y
ello exige usar informaci on adicional para seleccionar entre todas las soluciones una en
particular que se ajuste a la situaci on bajo estudio. Por ejemplo, en el caso P
(t) = P(t)
las soluciones son de la forma P(t) = Ce
t
, algunas de ellas representadas en la Figura
4.1. Se hace notar que las gr acas de todas ellas llenaran por completo el plano sin que
haya dos que se corten (consecuencia del teorema de existencia y unicidad que se ver a) y
que, en consecuencia, la elecci on de cualquier punto, en particular sobre el eje P, es decir
jado un valor P(0), conduce a la determinaci on de una unica soluci on que pasa por ese
punto.
Pudiera suceder que ninguna de las soluciones obtenida se adapte a todos los datos
conocidos a priori. En este caso lo que cabe pensar es que la ecuaci on diferencial no des-
cribe adecuadamente el problema fsico y habr a que considerar otra ecuaci on diferencial,
m as complicada, que tenga en cuenta otros factores que puedan inuir sobre la soluci on.
Desgraciadamente, esto es una constante que se repite en todo problema de modelizaci on
matem atica, y que se esquematiza en la Figura 4.2.
Un modelo matem atico satisfactorio ha de cumplir dos requerimientos importantes:
1. Ser lo sucientemente detallado como para representar adecuadamente la situaci on
del mundo real.
2. Ser lo sucientemente sencillo para que sea posible un an alisis matem atico pr actico.
4.2. AN
ALISIS CUALITATIVO, RESOLUCI
ONANAL
ITICAYRESOLUCI
ONNUM
ERICA33
Figura 4.2: Modelizaci on matem atica
Si falla lo primero, las soluciones pueden ser no realistas, y si falla lo segundo puede
ser irrealizable. Por tanto, sistem aticamente, se ha de llegar a un compromiso entre lo
fsicamente realista y lo matem aticamente viable.
4.2. Analisis cualitativo, resoluci on analtica y reso-
luci on numerica
Antes de resolver una ecuaci on diferencial podemos intentar predecir el comportamien-
to de las posibles soluciones. Es lo que llamaremos analisis cualitativo.
Por ejemplo en el modelo anterior, si en el instante inicial P(0) = 0, que se conoce con
el nombre de condici on inicial, resultar a que P(t) = 0 es una soluci on del problema ya
que satisface la ecuaci on diferencial y la condici on inicial. Corresponde a una poblaci on
que en el instante inicial no tiene ning un individuo.
Si P(0) = 0 resultar a que
dP
dt
(0) = 0 y por tanto la poblaci on no es constante.
Por ejemplo, si k > 0 y P(0) > 0, la poblaci on est a creciendo, ya que su derivada es
positiva. P(t) se hace mayor, y la derivada tambien, por lo que la poblaci on crece cada
vez mas r apidamente. En el supuesto P(0) < 0, que no tendra sentido en un problema
de evoluci on de poblaciones, resulta que la derivada en el instante inicial es negativa
(suponiendo k > 0), con lo cual P(t) es decreciente en ese instante, y posteriormente
tambien, y adem as con pendientes cada vez mayores en valor absoluto.
34 CAP
ITULO 4. INTRODUCCI
ON A LAS ECUACIONES DIFERENCIALES
Un segundo procedimiento para abordar el problema es lo que llamaremos resolu-
ci on analtica, que consistir a en la b usqueda de una funci on analtica que sea soluci on
del problema. Es el procedimiento descrito en la secci on anterior. Como se ha podido ob-
servar, las soluciones que se obtienen analticamente conrman las previsiones del an alisis
cualitativo.
Una tercera manera de resolver la ecuaci on diferencial, que denominaremos resolu-
ci on numerica, consistir a en la resoluci on aproximada. Ser a el metodo al que tendremos
necesidad de recurrir la mayor parte de las veces ya que los problemas de la vida real, en
general, no tienen soluci on analtica.
En resumen, el presente curso trata la resoluci on de problemas en los que intervienen
ecuaciones diferenciales para lo cual emplearemos los tres metodos descritos anteriormen-
te.
1. Analisis cualitativo. Trata de predecir el comportamiento de las soluciones. Est a es-
pecialmente indicado en el caso de ecuaciones aut onomas, que son aquellas en las
que la funci on segundo miembro no depende de la variable independiente, como el
caso tratado anteriormente. En otras situaciones mas generales ya es mas proble-
matico el tratamiento cualitativo, que podra consistir en representaciones gr acas
de campos de pendientes. En la actualidad estos metodos gr acos quedan en un
segundo plano, debido fundamentalmente la existencia de metodos numericos cada
vez mas precisos.
2. Resoluci on analtica. Consiste en encontrar la soluci on analtica del problema bajo
estudio, cuando sea posible. En muchas ocasiones no existir a soluci on analtica y en
otras, aunque exista, resultar a complicado encontrarla. En los pr oximos captulos
resolveremos analticamente algunos casos particulares sencillos y para otros mas
complejos, que tengan soluci on analtica, podemos apoyarnos en la parte simb olica
de Matlab (funci on dsolve).
3. Resoluci on numerica. Trata la resoluci on aproximada de aquellos problemas que
no tengan soluci on analtica o sea muy complicado encontrarla. Introduciremos el
metodo de Euler que, aunque es muy sencillo, y no demasiado preciso, es el funda-
mento de casi todos los dem as. Tambien describiremos otros metodos mucho mas
precisos como los metodos de Runge-Kutta. Implementaremos estos algoritmos en
Matlab y haremos uso de funciones especicas del programa citado (ode23, ode45,..)
4.3. Deniciones y clasicaci on
.
Una ecuaci on diferencial es una ecuaci on en la que interviene una funci on inc ognita
(escalar o vectorial) y una o m as de sus derivadas.
4.3. DEFINICIONES Y CLASIFICACI
ON 35
Existen distintos tipos de ecuaciones diferenciales:
Ecuaci on diferencial ordinaria (e.d.o.), si la funci on inc ognita es una funci on
escalar de una variable independiente.
Sistema de ecuaciones diferenciales ordinarias, si la funci on inc ognita es una
funci on vectorial de una variable independiente.
Ecuaci on en derivadas parciales (e.d.p.), si la funci on inc ognita es una funci on
escalar de m as de una variable independiente.
Sistema de ecuaciones en derivadas parciales, si la funci on inc ognita es una
funci on vectorial de m as de una variable independiente.
Orden de una ecuaci on diferencial es el orden de la derivada m as alta, y al exponente
al que est a elevada dicha derivada se le llama grado. Si la funci on inc ognita es y = y(t),
f(t, y, y
, y
, , y
(n)
) = 0 es una e.d.o. de orden n. Consideraremos ecuaciones de esta
forma que sean resolubles en la derivada de mayor grado, es decir en la forma y
(n)
=
g(t, y, y
, y
, , y
(n1)
), que se denomina forma normal de la ecuaci on diferencial.
Un sistema de ecuaciones diferenciales ordinarias de orden n en forma normal se escribe
r
(n)
= F(t, r, r
, r
, , r
(n1)
).
Por ejemplo, si r(t) = (x(t), y(t)) un sistema en forma normal de orden 2 sera:
d
2
x
dt
2
= F
1
(t, x, y, x
, y
)
d
2
y
dt
2
= F
2
(t, x, y, x
, y
).
Veremos m as adelante que hay una equivalencia entre sistemas y ecuaciones, por ejem-
plo una e.d.o. de orden n es equivalente a un sistema de primer orden y dimensi on n.
En una e.d.p. la funci on inc ognita depende de m as de una variable independiente, por
ejemplo una e.d.p. de segundo orden es la siguiente
2
u
x
2
+ 3
2
u
y
2
2
u
xy
+
u
y
+ 2u 3x + 4 = 0,
donde u : R
2
R.
36 CAP
ITULO 4. INTRODUCCI
ON A LAS ECUACIONES DIFERENCIALES
Captulo 5
Ecuaciones Diferenciales de primer
orden
5.1. Motivaci on
Hay muchas situaciones fsicas que se describen en terminos de ecuaciones diferenciales
de primer orden, por ejemplo para dise nar proyectores es preciso calcular la forma de un
espejo para que un haz de rayos paralelos que inciden sobre el se reejen en un mismo
punto.
Supongamos que la intersecci on del espejo con el plano Oxy es la curva y = y(x),
referida a un sistema de ejes coordenados tal que su origen est a situado en el punto por
el que pasan todos los rayos, paralelos a Ox, que se reejan en el espejo (Figura 5.1). Sea
P = (x, y) un punto generico de la curva en el que incide un rayo. Teniendo en cuenta
que el angulo de incidencia y reexi on son iguales, tal como se indica en la citada gura,
se deduce
tg 2 =
y
x
, tg = y
(x).
Por tanto
y
x
= tg 2 =
2 tg a
1 tg
2
=
2y
1 y
2
,
lo que da lugar a una ecuaci on de primer orden y segundo grado y(y
)
2
+2xy
y = 0. Se
obtienen as dos ecuaciones de primer orden
y
=
x
y
+
_
x
y
_
2
+ 1, y
=
x
y
_
x
y
_
2
+ 1
cuyas curvas integrales tienen la forma de sendos espejos, seg un sea el sentido de los rayos
(mismo sentido que Ox o el contrario).
La soluci on de las ecuaciones anteriores son las par abolas
y
2
= 2Cx +C
2
, y
2
= 2Cx +C
2
.
37
38 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 5.1: Dise no de espejo
La forma solicitada ser an los paraboloides de revoluci on que engendran las par abolas
anteriores al girar alrededor del eje Ox
y
2
+z
2
= 2Cx +C
2
, y
2
+z
2
= 2Cx +C
2
.
En el presente Captulo trataremos ecuaciones diferenciales de primer orden, es decir
ecuaciones de la forma
y
= f(x, y),
donde f es una funci on dada, denida en un dominio de R
2
.
Se llama soluci on de la e.d. a cualquier funci on y = (x) tal que
(x) = f(x, (x)),
y nuestra tarea consiste en averiguar si tales funciones existen, tratar de encontrarlas y
establecer su dominio de denici on. Resolveremos analticamente las ecuaciones lineales
y algunos casos particulares de ecuaciones no lineales, analizaremos cualitativamente los
problemas, en particular en el caso de ecuaciones aut onomas, y
= f(y), e introduciremos
los metodos numericos.
El caso m as simple es y
= f(x), cuya soluci on ser a cualquier primitiva de f.
5.2. ECUACIONES LINEALES. EXISTENCIA Y UNICIDAD DE SOLUCI
ON. 39
5.2. Ecuaciones Lineales. Existencia y unicidad de so-
luci on.
Son ecuaciones en las que f(x, y) es una funci on lineal en la variable y,
f(x, y) = p(x) y +g(x),
con lo que la e.d. queda en la forma
y
+p(x) y = g(x).
Ejemplo 5.2.1 Encontrar soluciones de la ecuaci on diferencial y
2y = x
2
e
2x
e
2x
[y
2y] = x
2
=(y e
2x
)
= x
2
=y e
2x
=
x
3
3
+C,
donde C es una constante arbitraria. Por tanto las soluciones de la e.d. son de la forma
y =
x
3
3
e
2x
+C e
2x
.
La expresi on obtenida, que recoge todas las soluciones de la e.d. dada, se llama soluci on
general. Si jamos un punto (condici on inicial), por el que debe pasar la soluci on, es
posible encontrar la unica soluci on que satisface tal condici on. Esto es una caracterstica
de las ecuaciones lineales.
Para obtener la soluci on de la e.d. en el caso en que p(x) no sea constante, buscare-
mos una funci on cualquiera, en particular la podemos suponer positiva, llamada factor
integrante, (x), tal que
(x)[y
+p(x)y] = [(x) y]
= (x) y
(x) y,
con lo cual (x) debe satisfacer
(x) p(x) y =
(x) y
(x)
(x)
= p(x).
Por tanto
ln (x) =
_
x
p(t) dt (x) = e
x
p(t) dt
.
Al multiplicar los dos miembros de la e.d. por el factor integrante resulta
(x)[y
+p(x)y] = [(x) y]
= (x) g(x) (x) y =
_
x
(t) g(t) dt +C,
obteniendo como soluci on general de la e.d.
y =
1
(x)
__
x
(t) g(t) dt +C
_
.
Este es un metodo general para resolver e.d. lineales de primer orden. La constante arbi-
traria quedar a determinada con la condici on inicial.
40 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 5.2: Soluci on unica del p.vi. (car acter global)
Teorema 5.2.1 (Teorema de existencia y unicidad) Si p, g C
0
[a, b], x
0
(a, b),
y
0
R cualquiera, entonces el problema de valor inicial
y
+p(x)y = g(x)
y(x
0
) = y
0
tiene una y s olo una soluci on en [a, b].
Es decir, el teorema anterior asegura que, bajo sus hip otesis, existe una y solo una
soluci on, que est a denida en todo el intervalo en el que p y g son continuas, por lo que
se dice que este teorema tiene caracter global (Ver Figura 5.2).
5.3. Ecuaciones no lineales. Existencia y unicidad de
soluci on.
En el caso general, el problema de valor inicial es de la forma
y
= f(x, y),
y(x
0
) = y
0
,
donde f es una funci on cualquiera, no necesariamente lineal. En este caso, al contrario
que en el lineal, no existe un metodo general de resoluci on de la ecuaci on y, de hecho,
5.3. ECUACIONES NO LINEALES. EXISTENCIA Y UNICIDAD DE SOLUCI
ON. 41
la determinaci on de una soluci on analtica de una ecuaci on no lineal es complicado y, a
menudo, imposible. Nos limitaremos, m as adelante, a estudiar algunos casos particulares
de ecuaciones no lineales. Otra diferencia importante, respecto al caso lineal, es que el
teorema de existencia y unicidad, que enunciamos a continuaci on, solamente garantizar a la
existencia de soluci on, bajo determinadas condiciones, en un entorno del punto dado por
la condici on inicial, por lo que diremos que tiene un caracter local.
Teorema 5.3.1 (Teorema de existencia y unicidad) Si f y
f
y
son continuas en
alg un rect angulo [a, b] [c, d] que contenga al punto (x
0
, y
0
), entonces existe un inter-
valo (x
0
h, x
0
+h) [a, b] en el cual est a denida una y solo una soluci on del p.v.i.
y
= f(x, y),
y(x
0
) = y
0
.
Existe otra versi on del teorema de existencia y unicidad con hip otesis m as debiles,
Teorema 5.3.2 (Teorema de existencia y unicidad) Si f es continua y satisface una
condici on de Lipschitz con respecto a la variable y en alg un rect angulo D = [a, b] [c, d]
que contenga al punto (x
0
, y
0
) [|f(x, y
1
) f(x, y
2
)| L|y
1
y
2
|, cualesquiera que sean
(x, y
1
), (x, y
2
) D], entonces existe un intervalo (x
0
h, x
0
+ h) [a, b] en el cual
est a denida una y solo una soluci on del p.v.i.
y
= f(x, y),
y(x
0
) = y
0
.
En la Figura 5.3 puede apreciarse la soluci on del p.v.i., denida localmente, en las
proximidades del punto donde est a situada la condici on inicial.
Aunque el teorema s olo garantiza la existencia y unicidad de soluci on en un entorno de
x
0
, dicha soluci on es posible prolongarla a un intervalo mayor, siempre que se mantengan
las hip otesis del teorema y la propia soluci on no presente discontinuidades. Por ejemplo,
el p.v.i.
y
= y
2
,
y(0) = 1,
tiene por soluci on y =
1
1 x
. A pesar que la funci on f(x, y) = y
2
satisface las hip otesis del
teorema en cualquier rect angulo contenido en R
2
, dicho teorema garantiza la existencia y
unicidad de soluci on unicamente en un entorno de 0 que, en este caso, se puede prolon-
gar hasta el (, 1), que es donde la soluci on permanece continua. Se llama soluci on
maximal a la soluci on denida sobre un intervalo tal que no se pueda prolongar mas, es
42 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 5.3: Soluci on unica del p.vi. (car acter local)
decir es la soluci on denida sobre el m aximo intervalo en el cual la soluci on sea de clase
C
1
.
Unicamente se puede predecir un resultado de existencia y unicidad sobre todo el
intervalo en el supuesto que f sea continua y lipschitziana respecto a la segunda variable
sobre [a, b] R,
Teorema 5.3.3 (Teorema de existencia y unicidad) Si f es continua y satisface una
condici on de Lipschitz con respecto a la variable y en D = [a, b] R, que contiene al punto
(x
0
, y
0
), entonces el problema de valor inicial
y
= f(x, y),
y(x
0
) = y
0
.
tiene una, y s olo una, soluci on en el intervalo [a, b], cualquiera que sea y
0
R.
.
A continuaci on resolveremos algunos casos particulares de e.d. no lineales.
5.3.1. Variables separables
La e.d. y
= f(x, y) puede ponerse en la forma M(x, y) +N(x, y) y
= 0. En el caso en
que M(x, y) = M(x) y N(x, y) = N(y) la ecuaci on se dice de variables separables, porque
escrita en forma diferencial queda M(x) dx = N(y) dy.
5.3. ECUACIONES NO LINEALES. EXISTENCIA Y UNICIDAD DE SOLUCI
ON. 43
Si H
1
(x) y H
2
(y) son funciones cualesquiera tales que H
1
(x) = M(x) y H
2
(y) = N(y),
la e.d. es de la forma
H
1
(x) +H
2
(y)
dy
dx
= 0
d
dx
[H
1
(x) +H
2
(y)] = 0 H
1
(x) +H
2
(y) = C.
La soluci on se presenta en forma implcita y, si se satisfacen las condiciones del teorema
de la funci on implcita, existir a una funci on y = (x) tal que H
1
(x) + H
2
((x)) = C,
que es la soluci on explcita de la ecuaci on diferencial. El c alculo de esta soluci on, o la
determinaci on del intervalo preciso en el que existe, puede resultar complicado.
Ejemplo 5.3.1 Encontrar la soluci on del p.v.i.
y
=
x
2
y(1+x
3
)
,
y(0) = 1.
En la pr actica la soluci on se obtiene directamente
y dy =
x
2
1 +x
3
dx =
y
2
2
=
1
3
ln(1 +x
3
) +C.
Al imponer la c.i. se obtiene C = 1/2, siendo la soluci on del p.v.i.
y(x) =
_
2
3
ln(1 +x
3
) + 1.
En este caso se ha obtenido f acilmente la soluci on explcita, pero no es sencillo precisar
el intervalo m aximo, en torno al punto x = 0, en el cual est a denida, (0,91, ).
Ejercicio 5.3.1 Encontrar la soluci on del p.v.i., precisar su intervalo de denici on y
representarla gr acamente.
y
=
y1
x+3
,
y(1) = 0.
5.3.2. Ecuaciones exactas y reducibles a exactas
Si (x, y) = C dene implcitamente y como funci on diferenciable de x, entonces
x
(x, y) +
y
(x, y)
dy
dx
= 0
es la e.d. cuya soluci on es (x, y) = C.
44 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Recprocamente, sea la e.d. M(x, y) +N(x, y) y
= 0, si existe una funci on tal que
x
(x, y) = M(x, y),
y
(x, y) = N(x, y),
y (x, y) = C dene y = (x) como funci on de x, entonces
M(x, y) +N(x, y) y
=
x
(x, y) +
y
(x, y) y
=
d
dx
[(x, (x))].
Por tanto,
M(x, y) +N(x, y) y
= 0
d
dx
[(x, (x))] = 0 (x, y) = C.
En este caso la e.d. se dice exacta.
Teorema 5.3.4 Sean M, N, M
y
, N
x
continuas en un rect angulo D = [a, b] [c, d]. En-
tonces la e.d. M(x, y) + N(x, y) y
= 0 es exacta en D si, y s olo si M
y
(x, y) = N
x
(x, y)
para todo (x, y) D.
Una e.d. M(x, y) + N(x, y) y
= 0 es reducible a exacta si es posible encontrar una
funci on no nula (x, y), llamada factor integrante tal que M +N y
= 0 sea exacta,
para lo cual se ha de cumplir (M)
y
= (N)
x
. En el caso particular en que sea funci on
solamente de x, o solamente de y, es posible calcular un factor integrante si se cumplen
determinadas condiciones.
= (x) M
y
=
x
N +N
x
x
=
M
y
N
x
N
.
Por tanto si el segundo miembro es funci on de x, existe un factor integrante = (x) que
se obtiene resolviendo la ultima e.d.
Si = (y), entonces se tiene
y
M +M
y
= N
x
y
=
M
y
N
x
M
,
con lo cual existir a = (y), si el segundo miembro es funci on de y.
Ejemplo 5.3.2 Resolver la e.d. y + (2xy e
2y
) y
= 0.
La e.d. no es exacta, pero
M
y
N
x
M
=
1 2y
y
. Por tanto resolviendo la e.d.
=
M
y
N
x
M
=
1 2y
y
= 2
1
y
5.3. ECUACIONES NO LINEALES. EXISTENCIA Y UNICIDAD DE SOLUCI
ON. 45
se obtiene ln = 2y ln y =ln(y) = 2y = =
e
2y
y
.
Multiplicando la e.d. dada por este factor integrante se obtiene una nueva e.d. exacta
e
2y
+ (2xe
2y
1
y
)
dy
dx
= 0,
que tiene como soluci on implcita e
2y
x ln y = C.
5.3.3. Ecuaciones homogeneas y reducibles a homogeneas
Una e.d. M(x, y) + N(x, y) y
= 0 se dice homogenea si M y N son funciones ho-
mogeneas del mismo grado, o equivalentemente
M(x, y)
N(x, y)
homogenea de grado 0. Se re-
suelven mediante el cambio de variable
y
x
= v y = v x
que la transforma en una de variables separables.
Ejemplo 5.3.3 Resolver la e.d. y
=
x
2
+ 3y
2
2xy
.
Se trata de una ecuaci on homogenea. El cambio de variable y = vx la transforma en
dv
dx
x +v =
1 + 3v
2
2v
x
dv
dx
=
1 +v
2
2v
2v
1 +v
2
dv =
dx
x
,
cuya soluci on es ln |1 + v
2
| = ln |x| + ln C, con C R
+
, o equivalentemente 1 + v
2
= kx
con k R, es decir
1 +
y
2
x
2
= kx y
2
= k x
3
x
2
.
Consideremos una e.d. de la forma
dy
dx
= f
_
a
1
x +b
1
y +c
1
a
2
x +b
2
y +c
2
_
, a
1
, a
2
, b
1
, b
2
, c
1
, c
2
R.
1. Si las rectas a
1
x + b
1
y + c
1
= 0, a
2
x + b
2
y + c
2
= 0 se cortan en un punto (, ),
entonces el cambio
x = X +,
y = Y +,
la transforma en una homogenea.
2. Si, por el contrario, tales rectas no se cortan, entonces el cambio de variable
z(x) = a
2
x +b
2
y(x)
la transforma en una de variables separables.
46 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
5.3.4. Ecuaciones reducibles a lineales. Ecuaciones de Bernouilli
y Ricatti
Ecuaci on de Bernouilli
Se trata de una ecuaci on cl asica, propuesta por Jacob Bernouilli en 1695, cuyo metodo
de resoluci on public o Johann Bernouilli en 1697. Es de la forma
y
= p(x)y +q(x)y
.
En el caso = 0 o = 1 es lineal y su soluci on se obtiene por el metodo general ya
descrito. Si = 0 y = 1 es no lineal, y mediante el cambio de variable dependiente
z(x) = y
1
(x),
se transforma en
z
(x) = (1 )p(x) z + (1 )q(x),
ecuaci on lineal que se resuelve por el metodo general.
Ejemplo 5.3.4 Encontrar la soluci on general de la e.d.
y
=
y
2x
+
x
2
2y
.
Se reconoce una ecuaci on de Bernouilli con = 1, por lo que el cambio indicado
ser a z = y
2
. La nueva ecuaci on es z
=
1
x
z + x
2
, cuya soluci on general es z =
x
3
2
+ C x.
Por tanto, la soluci on de la ecuaci on original es y
2
=
x
3
2
+C x.
Ecuaci on de Ricatti
Es una ecuaci on de la forma
y
+p(x) y +q(x) y
2
= f(x).
Si f(x) = 0 es una ecuaci on de Bernouilli con = 2, si q(x) = 0 es una ecuaci on lineal y
si p(x), q(x) y f(x) son constantes es una ecuaci on de variables separables.
En general, no puede resolverse por cuadraturas pero se transforma en una de Ber-
nouilli si se conoce una soluci on particular.
Sea y
1
(x) una soluci on particular de la ecuaci on de Ricatti. El cambio de variable
dependiente
y(x) = y
1
(x) +z(x)
5.3. ECUACIONES NO LINEALES. EXISTENCIA Y UNICIDAD DE SOLUCI
ON. 47
la transforma en la ecuaci on de Bernouilli
z
= [p(x) + 2q(x) y
1
(x)]z q(x) z
2
,
que mediante el cambio
u(x) =
1
z(x)
se transforma en la ecuaci on lineal
u
= [p(x) + 2q(x) y
1
(x)]u q(x).
En realidad, se puede hacer directamente el cambio
y(x) = y
1
(x) +
1
u(x)
para transformar la ecuaci on de Ricatti en una lineal.
Ejemplo 5.3.5 Encontrar la soluci on general de la e.d.
y
= y
2
2
x
2
,
sabiendo que y = 1/x es una soluci on particular.
Es una ecuaci on de Ricatti. Por tanto, el cambio de variable dependiente
y(x) =
1
x
+
1
z(x)
la transforma en una ecuaci on lineal,
z
+
2
x
z = 1,
cuya soluci on general es
z =
x
3
+
C
x
2
=
x
3
+k
3x
2
.
Por tanto, la soluci on de la ecuaci on original es
y(x) =
1
x
+
3x
2
x
3
+k
.
48 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
5.4. Ecuaciones aut onomas. Analisis cualitativo
Haremos referencia a un ejemplo concreto, el modelo logstico de poblaci on, para in-
troducir algunas ideas simples acerca del an alisis cualitativo de las ecuaciones aut onomas.
Si una poblaci on tiene ndices constantes de natalidad y mortalidad, un modelo ele-
mental de la evoluci on de la poblaci on es
dP(t)
dt
= k P(t).
Este modelo puede tener validez cuando dicha poblaci on tenga suciente espacio, abun-
dancia de alimentos y otros recursos naturales que permitan sostener su crecimiento.
En otro caso, la ecuaci on debe modicarse de manera que se tenga en cuenta la tasa
reducida de crecimiento, es decir si la poblaci on es demasiado grande los recursos no ser an
sucientes y la poblaci on disminuir a. Tratamos de encontrar una ecuaci on diferencial que
recoja las siguientes consideraciones:
Para valores peque nos de P, la tasa de crecimiento es proporcional a P.
Para valores muy grandes, por encima de un cierto tama no N, llamado capacidad
de soporte, la tasa de crecimiento ser a negativa.
La propia ecuaci on diferencial debe ser lo mas simple posible.
Todos estos requerimientos quedan recogidos en la siguiente ecuaci on diferencial
dP(t)
dt
= k
_
1
P(t)
N
_
P(t),
llamada modelo logstico de poblaci on con velocidad de crecimiento k y capacidad de
soporte N. Se trata de una ecuaci on no lineal aut onoma ya que su segundo miembro no
depende explcitamente de la variable independiente t.
En este modelo la variable independiente t 0 y P(t) 0. Un caso mas general es el
que se recoge en el siguiente ejercicio.
Ejercicio 5.4.1 Consideremos el p.v.i.
y
= y y
2
,
y(0) = y
0
,
donde , > 0. Discutir, seg un los valores de y
0
, la soluci on y precisar el intervalo de
validez de la misma.
5.4. ECUACIONES AUT
ONOMAS. AN
ALISIS CUALITATIVO 49
Figura 5.4: Gr aca de la funci on segundo miembro. Lnea de fase.
En el supuesto que la variable independiente sea el tiempo t 0 e y(t) 0 este
problema de valor inicial corresponde al modelo logstico de evoluci on de poblaciones.
A partir de la propia ecuaci on diferencial podemos extraer informaci on cualitativa
acerca del comportamiento de las soluciones, ya que sabemos cuando y
(x) es positiva,
negativa o nula. Si representamos gr acamente la funci on
f(y) = y y
2
= y
_
1
y
_
(ver gura 5.4) observamos que corta al eje Oy en dos puntos, y = 0 e y = / en los cuales
la derivada se anula. Por tanto, las funciones constantes y(x) = 0 e y(x) = / resuelven
la ecuaci on diferencial. Estas funciones tienen pleno sentido en el caso del modelo de
evoluci on de poblaciones: si la poblaci on es cero, permanecer a nula indenidamente y si
la poblaci on coincide con la capacidad de soporte, ni crecer a ni disminuir a.
En la misma gr aca puede observarse como a la izquierda de y = 0, y
= f(y) < 0,
por lo que la funci on y = y(x) ser a decreciente. Esta circunstancia puede reejarse en
la gr aca marcando en esa zona del eje Oy una echa hacia la izquierda. An alogamente,
para valores 0 < y < / resulta que y
= f(y) > 0, y = y(x) ser a creciente y por tanto
marcamos en ese intervalo echas hacia la derecha. Del mismo modo, observaremos que
para y > / la funci on ser a decreciente. La parte de la gr aca correspondiente al eje
Oy se denomina lnea de fase. Interpretando adecuadamente la lnea de fase podemos
deducir el comportamiento de las soluciones, en particular, para valores grandes de x, tal
como queda reejado en la gura 5.5.
Las dos soluciones constantes y(x) = 0 e y(x) = / se dicen soluciones de equili-
50 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 5.5: Comportamiento previsible de las soluciones.
brio. Una soluci on de equilibrio se dice estable si peque nas perturbaciones en la condici on
inicial produce peque nas perturbaciones en la propia soluci on. Este es el caso de la solu-
ci on y(x) = / que, adem as, es asint oticamente estable ya que, en este caso, si nos
limitamos al primer cuadrante de la gura 5.5, que corresponde al modelo de poblaci on,
cualquiera que sea la condici on inicial y
0
= 0 la soluci on tiende a / cuando x ,
es decir cualquiera que sea la poblaci on inicial, el n umero de individuos de la poblaci on
tiende a estabilizarse en torno al valor / (capacidad de soporte de la poblaci on). Por
el contrario, una soluci on de equilibrio se dice inestable si una peque na perturbaci on
de la condici on inicial produce una desviaci on fuerte de la soluci on, como por ejemplo la
soluci on y(x) = 0. Ver Figura 5.5.
Este problema se puede resolver analticamente ya que la ecuaci on es de variables
separables. Tambien es una ecuaci on de Bernouilli.
Tiene dos soluciones constantes, y = 0 e y = /, que ser an soluci on del p.v.i. en los
casos y
0
= 0 o y
0
= / respectivamente. En otro caso, la soluci on que se obtiene es
y(x) =
y
0
e
x
y
0
+y
0
e
x
. (5.1)
Dicha funci on presenta una asntota vertical
x
A
=
1
ln
_
y
0
/
y
0
_
,
que existir a realmente si y
0
< 0 o bien y
0
>
. En los dem as casos, 0 < y
0
<
, dado que
la funci on f(x, y) = y y
2
y su derivada parcial respecto de y son continuas en todo
5.5. M
ETODOS APROXIMADOS 51
5 4 3 2 1 0 1 2 3 4 5
5
4
3
2
1
0
1
2
3
4
5
x
O
y
Figura 5.6: Soluci on seg un valores de y
0
.
R
2
, la soluci on del p.v.i. se podr a prolongar a todo R. En resumen, los casos posibles son
y
0
< 0 5.1 en (, x
A
), con x
A
> 0,
y
0
= 0 y(x) = 0, en (, ),
0 < y
0
< / 5.1 en (, ),
y
0
= / y(x) = /, en (, ),
y
0
> / 5.1 en (x
A
, ), con x
A
< 0.
En la Figura 5.6 est an representadas las soluciones del p.v.i. en el caso = = 1,
y las condiciones iniciales y
0
= 0, y
0
= 0,5, y
0
= 1 e y
0
= 2. En este ultimo caso puede
observarse tambien la asntota vertical. En todos estos casos se conrman plenamente las
previsiones del an alisis cualitativo.
5.5. Metodos aproximados
Tal como se ha visto hasta ahora, la soluci on explcita de una ecuaci on de primer
orden puede ser obtenida solamente en casos simples (ecuaciones lineales, y no todas, y
algunos casos muy particulares de ecuaciones no lineales). Frente a esta limitaci on se han
desarrollado los metodos gr acos, que consisten en representar los campos de direcciones
en una malla de puntos, y los metodos aproximados, que podemos clasicar en dos tipos:
metodos aproximados analticos, que aproximan la soluci on del problema globalmen-
te en el intervalo que se este considerando, y metodos numericos, que aproximan la
soluci on en un conjunto de valores discretos.
52 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
En el grupo de metodos analticos guran el metodo de aproximaciones sucesivas de
Picard, que desarrollamos a continuaci on, o los de desarrollo en serie. No son demasiado
efectivos en la pr actica y su interes es fundamentalmente te orico.
Los metodos numericos son los m as utilizados en la actualidad, por su gran interes
desde el punto de vista pr actico. Hay toda una gama de metodos para resolver problemas
de valor inicial, entre los cuales est a el de Euler. El metodo de Euler es uno de los metodos
m as simples, aunque raramente se utiliza en la pr actica, ya que existen otros metodos
mucho m as ecientes. No obstante, vamos a desarrollar someramente este metodo porque
permite estudiar los conceptos b asicos de la soluci on numerica de ecuaciones diferenciales,
tiene una interpretaci on geometrica clara y conceptualmente es sencillo.
5.5.1. Metodos gracos. Campos de direcciones
Cuando una ecuaci on diferencial carece de soluci on analtica se puede obtener una
idea gr aca de las curvas integrales representando el campo de direcciones, para lo cual
se considera una malla de puntos sobre los cuales representamos un segmento de la recta
tangente en ese punto.
Por ejemplo, la ecuaci on diferencial
y
= y
2
+xy
3
no tiene soluci on analtica. La respuesta de MATLAB al intento de obtener la soluci on es
la siguiente.
EDU)) y=dsolve(Dy=y^2+x*y^3,x)
Warning: Explicit solution could not be found.
El campo de direcciones sobre una malla de puntos en el cuadrado [2, 2] [2, 2],
con paso de discretizaci on h = 0,2, se puede obtener mediante el siguiente c odigo.
x=-2:0.2:2;y=-2:0.2:2; [X,Y]=meshgrid(x,y); v1=Y.^2+X.*Y.^3;
mod=sqrt(1+v1.^2); % norma del vector (1,y)
dx=ones(size(X))./mod; % normalizaci on de los vectores
dy=v1./mod; quiver(X,Y,dx,dy,1,.g)
En la gura 5.7 se puede observar el campo de direcciones, con im agenes superpuestas
de soluciones numericas, de cuatro problemas de valor inicial, obtenidas mediante ode45.
Por ejemplo, para resolver el p.v.i. con condici on inicial y(1) = 2, en el intervalo
[1, 2], construimos el chero fun1.m con la funci on
function f=fun1(x,y) f=y.^2+x.*y.^3;
5.5. M
ETODOS APROXIMADOS 53
2 1.5 1 0.5 0 0.5 1 1.5 2
2
1.5
1
0.5
0
0.5
1
1.5
2
Figura 5.7: Campo de direcciones y soluciones numericas
y ejecutamos las instrucciones
EDU)) [x,y45]=ode45(fun1,[-1,2],-2); EDU)) plot(x,y45)
5.5.2. Aproximaciones sucesivas de Picard
Resolver el problema de valor inicial
y
= f(x, y),
y(x
0
) = y
0
,
es equivalente a resolver la ecuaci on integral
(x) = y
0
+
_
x
x
0
f(t, (t)) dt
en el sentido siguiente: (x) es soluci on del p.v.i. sobre un intervalo I si, y s olo si, es
soluci on continua de la ecuaci on integral.
El metodo de aproximaciones sucesivas de Picard consiste en considerar la sucesi on de
funciones denida de la siguiente manera:
0
(x) = y
0
,
n
(x) = y
0
+
_
x
x
0
f(t,
n1
(t)) dt, n = 1, 2,
54 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
3 2 1 0 1 2 3
1
0.8
0.6
0.4
0.2
0
x
exp(x^2/2)
y=y(x)
y0
y1
y2
y3
y4
Figura 5.8: Aproximaciones de Picard de e
x
2
2
Ning un termino de la sucesi on es soluci on del p.v.i., pero, precisamente, una de las formas
de demostraci on del teorema de existencia y unicidad (teorema 5.3.1 o 5.3.2) consiste en
demostrar que la sucesi on de Picard converge uniformemente a una funci on (x), que es
soluci on de la ecuaci on integral, y por tanto del p.v.i.. El termino n-esimo de la sucesi on,
n
(x), es una soluci on aproximada del p.v.i., tanto m as precisa cuanto mayor sea n.
Ejemplo 5.5.1 Dado el problema de valor inicial y
= xy, y(0) = 1. Encontrar los
cuatro primeros terminos de la sucesi on de Picard y comparar con la soluci on exacta.
Los primeros terminos de la sucesi on de Picard son
0
= y(0) = 1,
1
(x) = 1
_
x
0
(1) t dt = 1 +
x
2
2
,
2
(x) = 1
_
x
0
_
1 +
t
2
2
_
t dt = 1 +
x
2
2
1
2!
_
x
2
2
_
2
,
3
(x) = 1
_
x
0
_
1 +
t
2
2
t
4
8
_
t dt = 1 +
x
2
2
1
2!
_
x
2
2
_
2
+
1
3!
_
x
2
2
_
3
.
Se observa que son los polinomios de Taylor de la funci on (x) = e
x
2
2
, alrededor de
x = 0, que es precisamente la soluci on del p.v.i.. Es decir, en un problema con soluci on
analtica, la sucesi on de Picard est a formada por los polinomios de Taylor de dicha fun-
ci on alrededor del punto dado por la condici on inicial. En la Figura 5.8 se pueden ver la
5.5. M
ETODOS APROXIMADOS 55
soluci on exacta y los primeros terminos de la sucesi on de Picard. Puede observarse como
aumenta la precisi on y el intervalo a medida que aumenta n.
5.5.3. Metodos numericos. Metodos de Euler y Runge-Kutta
M
ETODO DE EULER
Supongamos que el p.v.i.
y
= f(x, y),
y(x
0
) = y
0
,
tiene soluci on unica en el intervalo [x
0
, b], y = (x), y deseamos obtener una estimaci on de
(b). Como ya hemos dicho anteriormente, para obtener dicha estimaci on existen diversos
metodos numericos. Nosotros vamos a exponer el metodo de Euler en su forma m as simple,
el de paso de discretizaci on constante.
Consideremos la partici on del intervalo [x
0
, b],
x
0
< x
1
< x
2
< < x
i1
< x
i
< < x
N1
< x
N
= b,
tal que x
i
x
i1
= h =
b x
0
N
.
La soluci on exacta tiene pendiente f(x
0
, y
0
) en el punto (x
0
, y
0
), por lo que la ecuaci on
de la recta tangente en dicho punto es y y
0
= f(x
0
, y
0
)(xx
0
). Para x = x
1
, obtenemos
el punto (x
1
, y
1
) sobre la recta tangente, donde y
1
es una estimaci on de (x
1
)
y
1
= y
0
+f(x
0
, y
0
)(x
1
x
0
) = y
0
+f(x
0
, y
0
)h.
En realidad, lo que se ha hecho ha sido considerar la ecuaci on integral sobre el intervalo
[x
0
, x
1
] y aproximar el integrando por la constante f(x
0
, y
0
),(ver gura 5.9 donde se observa
la aproximaci on de la funci on integrando en el intervalo [x
n
, x
n+1
]),
(x
1
) = y
0
+
_
x
1
x
0
f(t, (t)) dt y
0
+
_
x
1
x
0
f(x
0
, y
0
) dt = y
0
+f(x
0
, y
0
)h = y
1
.
Conocido y
1
, f(x
1
, y
1
) es una aproximaci on de la pendiente de la recta tangente a la
soluci on exacta y = (x) en el punto (x
1
, (x
1
)) = (x
1
, y
1
). En realidad, es la pendiente
a la unica curva integral de la e.d. que pasa por el punto (x
1
, y
1
). Ver Figura 5.10. Consi-
deremos entonces la recta y y
1
= f(x
1
, y
1
)(x x
1
), que para x = x
2
nos proporciona el
punto
y
2
= y
1
+f(x
1
, y
1
)h,
y as sucesivamente.
56 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 5.9: Metodo de Euler. Aproximaci on de la funci on integrando
Este es el algoritmo del metodo de Euler con paso constante
y
0
= y(x
0
),
y
n+1
= y
n
+f(x
n
, y
n
)h, n = 0, 1, 2,
que proporciona una sucesi on de puntos, estimaci on de la soluci on exacta en los puntos
de la partici on, y
N
como estimaci on de (b), y una curva poligonal, continua en [x
0
, b] y
derivable salvo en los puntos de la partici on
y
N
(x) = y
i1
+f(x
i1
, y
i1
)(x x
i1
), x [x
i1
, x
i
], i = 1, 2, .., N,
como aproximaci on de la soluci on exacta.
La sucesi on de funciones {y
N
(x)}, construida de esta manera, proporciona el otro
metodo alternativo de demostraci on del teorema de existencia y unicidad (Teorema 5.3.1
o 5.3.2). Se comprueba que dicha sucesi on converge uniformemente a una funci on continua
y = (x) en un intervalo (x
0
h, x
0
+ h), que adem as es derivable y soluci on exacta del
p.v.i..
Estudio del error
La diferencia entre la soluci on exacta y la aproximada en el punto x
n
E
n
= y
n
(x
n
)
5.5. M
ETODOS APROXIMADOS 57
Figura 5.10: Metodo de Euler
se conoce como f ormula de error global acumulado en la etapa n-esima. Este error se
origina debido a que en cada etapa utilizamos una f ormula aproximada para determinar
y
n+1
, y a que el dato de entrada y
n
= (x
n
).
Si suponemos que los datos de entrada son exactos, y
n
= (x
n
), el unico error presente
en cada paso es el debido al uso de una f ormula aproximada, y es conocido como error
local o error de consistencia
e
n
= (x
n
) +f(x
n
, (x
n
))h (x
n+1
).
En la Figura 5.10 pueden observarse ambos tipos de errores en las etapas n y n + 1, y la
relaci on entre ellos
E
n+1
= E
n
+e
n
+ [f(x
n
, y
n
) f(x
n
, (x
n
))]h. (5.2)
Adem as, en cada etapa se producir a un error de redondeo, debido a que la calculadora,
o el ordenador en que implementemos el algoritmo, har a los c alculos con una precisi on
limitada. Podramos hablar por tanto de un error de redondeo acumulado en la etapa
n-esima
R
n
= y
n
Y
n
,
donde Y
n
es el valor realmente calculado por el procedimiento numerico.
El valor absoluto del error total viene dado por
|(x
n
) Y
n
| |(x
n
) y
n
| +|y
n
Y
n
| = |E
n
| +|R
n
|.
En la Figura 5.11 se observa la soluci on exacta del p.v.i.
y
= y,
y(0) = 1,
58 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
Figura 5.11: Metodo de Euler. Soluci on exacta y calculada con h = 0,1 y h = 0,001
en el intervalo [0, 1] y las soluciones aproximadas, obtenidas por el metodo de Euler con
paso de discretizaci on h = 0,1 y h = 0,001. Las soluciones obtenidas para y(1) son
respectivamente 2.5937 y 2.7169, con errores totales 0.1245 y 0.0014.
Dado que no se conoce la soluci on exacta en el punto (x
n
, (x
n
)), no es posible deter-
minar el error local ni el acumulado, por lo que es preciso hacer estimaciones.
Si la soluci on exacta y = (x) es de clase C
2
, para lo cual basta con que f sea de clase
C
1
, tendremos
(x
n+1
) = (x
n
) +
(x
n
)h +
()
2!
h
2
, x
n
< < x
n+1
.
Por tanto,
|e
n
| =
1
2
|
()h
2
| Kh
2
,
donde la constante K es independiente de h.
M as signicativo que el error local es el global acumulado
Proposici on 5.5.1 (Estimaci on del error global) Si f es de clase C
1
y lipschitziana,
respecto al segundo argumento, el metodo de Euler es tal que
|E
n
| Ch,
donde la constante C es independiente de h.
A partir de 5.2 se obtiene
|E
n+1
| |E
n
| +|e
n
| +|f(x
n
, y
n
) f(x
n
, (x
n
))|h |E
n
|(1 +Lh) +Kh
2
,
5.5. M
ETODOS APROXIMADOS 59
Figura 5.12: Errores de un metodo numerico
donde el primer sumando es una acotaci on del error acumulado en los n primeros pasos
y el segundo una acotaci on del error del paso n + 1.
Se demuestra f acilmente, por inducci on, que
|E
n
|
K
L
[(1 +hL)
n
1] h, n N.
Como 1 +hL e
hL
y nh b x
0
, se obtiene (1 +hL)
n
e
hLn
e
L(bx
0
)
, y por tanto
|E
n
|
K
L
_
e
L(bx
0
)
1
h = Ch.
Disponemos as de una acotaci on del error acumulado, aunque el c alculo efectivo de
la constante C es impracticable. La elecci on del paso de discretizaci on h es una cuesti on
complicada, porque cuando h disminuye el error global acumulado tambien lo hace, pero
el de redondeo aumenta. Ver Figura 5.12. Los analistas numericos lo que hacen es aplicar
el metodo de Euler al p.v.i. con un paso h razonable, y repetir la operaci on con h/2, h/4,
h/8, etc. hasta que sea despreciable el cambio en las cifras signicativas. En ese punto, se
considera que la aproximaci on numerica es, con bastante certeza, casi exacta.
Convergencia
Diremos que el metodo numerico es convergente para el problema de valor inicial, si
los errores globales tienden a cero cuando h tiende a 0
lm
h0
|E
n
| = 0.
60 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
En el estudio de la convergencia juega un importante papel el error local denido
anteriormente. Diremos que el metodo numerico es consistente con el p.v.i. si
lm
h0
N1
n=1
|e
n
| = 0,
es decir, si la suma de los errores locales es despreciable cuando h es sucientemente
peque no.
Finalmente, diremos que el metodo numerico es estable si peque nas perturbaciones de
los datos de entrada producen peque nas perturbaciones en la soluci on. Dada la existencia
de errores de redondeo, la condici on de estabilidad ser a absolutamente necesaria para el
tratamiento numerico de cualquier problema. Obviamente, los esquemas inestables carecen
de todo interes pr actico.
El metodo de Euler, si f es continua y lispchitziana respecto al segundo argumento,
es estable, consistente y convergente.
Perversiones numericas
Ejemplo 5.5.2 Usar el metodo de Euler para obtener una soluci on aproximada del p.v.i.
y
=
_
1 y
2
y(0) = 0,
con paso de discretizaci on h = 0,01, en el intervalo [0, 3]
Este ejemplo proporciona una de las trampasde los metodos numericos. Al aplicar
el esquema de Euler a este problema
y
n+1
= y
n
+h
_
1 y
2
n
,
puede llegar un momento en que el valor de y
n
calculado en la etapa n-esima sea tal que
y
2
n
> 1, en cuyo caso queda interrumpido el algoritmo, a no ser que se tome el valor y
n
= 1,
y en ese caso se obtiene y
n+
= y
n
para todo N.
La soluci on naturaldel p.v.i. es (x) = sen x, pero tambien es soluci on del mismo
problema
y(x) =
_
sen x si 0 x /2,
1 si /2 x 3.
y es esta la que aproxima el metodo numerico. (Ver Figura 5.13).
La perversi on est a en el punto (/2, 1), donde el problema no tiene soluci on unica (la
funci on f no satisface las hip otesis del teorema de existencia y unicidad en ese punto). Por
tanto, antes de aplicar el metodo de Euler, o cualquier otro, es muy conveniente asegurarse
de que la soluci on es unica en el intervalo bajo estudio. En otro caso, no hay un metodo
5.5. M
ETODOS APROXIMADOS 61
0 0.5 1 1.5 2 2.5 3
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Figura 5.13: Perversi on numerica: soluci on exacta y aproximada
1 0.5 0 0.5 1 1.5
1
1.2
1.4
1.6
1.8
2
2.2
Figura 5.14: Perversi on numerica: soluci on aproximada err onea
62 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
pr actico y aplicable con generalidad para predecir el camino que tomar a la aproximaci on
numerica cuando encuentra un punto en el cual la unicidad no est a garantizada.
Ejemplo 5.5.3 Usar el metodo de Euler, con paso de discretizaci on h = 0,075, para
obtener una soluci on aproximada del p.v.i.
9xy
+y = 0,
y(1) = 1,
en el intervalo [1, 1].
Al aplicar el metodo de Euler se obtiene la soluci on que se reeja en la Figura 5.14,
que no aproxima a la soluci on real, y(x) = x
1/9
, en todo el intervalo, porque el metodo
numerico no detect o la discontinuidad, al ser el paso de discretizaci on demasiado grande.
Un modo de evitar este riesgo consiste en ejecutar el programa varias veces con valores
cada vez mas peque nos del paso de discretizaci on. La presencia de la discontinuidad pue-
de manifestarse por valores aproximados que cambian r apidamente, en vez de converger,
cuando h disminuye. Una alternativa mejor es utilizar un metodo de Euler con paso de
discretizaci on variable, basado en estimaciones del error local, de modo que el propio al-
goritmo no permite atravesarla asntota.
M
ETODO DE EULER MEJORADO (RUNGE-KUTTA DE ORDEN 2)
El metodo de Euler se obtuvo al aproximar la serie de Taylor por los terminos de
primer orden. Si truncamos la serie de Taylor en los terminos de segundo orden se obtiene
y(x
n+1
) y(x
n
) +hf(x
n
, y(x
n
)) +
h
2
2
_
df(x, y)
dx
_
(x
n
, y(x
n
)) =
= y(x
n
) +hf(x
n
, y(x
n
)) +
h
2
2
_
f
x
+
f
y
y
_
(x
n
, y(x
n
)) =
= y(x
n
) +hf(x
n
, y(x
n
)) +
h
2
2
_
f
x
+
f
y
f
_
(x
n
, y(x
n
))
En este caso existe el inconveniente de la necesidad de evaluar
f
x
y
f
y
lo cual
puede ser complicado. Por esta raz on es deseable obtener metodos numericos que no
requieran calcular derivadas parciales y tengan la misma precisi on que el desarrollo de
Taylor de orden 2. Una manera es considerar la ecuaci on integral, equivalente a la ecuaci on
diferencial, en el intervalo [x
n
, x
n+1
]
y(x
n+1
) = y(x
n
) +
_
x
n+1
x
n
f(t, y(t)) dt
5.5. M
ETODOS APROXIMADOS 63
Figura 5.15: Metodo de Euler mejorado
y aproximar el integrando por la recta secante (ver gura 5.15).
En este caso se obtiene
y
n+1
= y
n
+
1
2
[f(x
n
, y
n
) +f(x
n+1
, y
n+1
)] h.
No obstante, no es posible utilizar esta f ormula para determinar y
n+1
ya que tambien
aparece en el segundo miembro. Una manera ingeniosa de subsanar este inconveniente
es sustituir y
n+1
en el segundo miembro por el obtenido mediante el metodo de Euler,
resultando el algoritmo
y
0
= y(x
0
),
y
n+1
= y
n
+
1
2
[f(x
n
, y
n
) +f (x
n+1
, y
n
+f(x
n
, y
n
)h)] h, n = 0, 1, 2, ,
conocido con el nombre de metodo de Euler mejorado o metodo de Runge-Kutta de
segundo orden. Se demuestra que es un metodo de orden 2, es decir el error acumulado
es tal que
|E
n
| Ch
2
.
M
ETODO DE RUNGE-KUTTA DE ORDEN 4
El metodo de Runge-Kutta de cuarto orden se obtiene al desarrollar una f ormula
recurrente general que sea equivalente a un desarrollo en serie de Taylor de cuarto orden.
64 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
h Euler Euler mejorado Runge Kutta de orden 4
1/4 0,5538 0,04685 1,43 10
4
1/8 0,3050 0,01288 9,96 10
6
1/16 0,1607 0,00337 6,52 10
7
1/32 0,0826 0,00086 4,20 10
8
1/64 0,0419 0,00021 2,66 10
9
1/128 0,0211 0,00005 1,67 10
10
1/256 0,0106 0,00001 1,05 10
11
Cuadro 5.1: Comparaci on de los errores
Se obtiene de esta manera el siguiente algoritmo
y
0
= y(x
0
),
F
1
= hf(x
n
, y
n
),
F
2
= hf(x
n
+
h
2
, y
n
+
F
1
2
),
F
3
= hf(x
n
+
h
2
, y
n
+
F
2
2
),
F
4
= hf(x
n
+h, y
n
+F
3
),
y
n+1
= y
n
+
1
6
[F
1
+ 2F
2
+ 2F
3
+F
4
] , n = 0, 1, 2, , N 1.
En este caso el error acumulado es tal que
|E
n
| Ch
4
.
La comprobaci on numerica del orden de los tres metodos descritos se materializa al
observar que si el paso de discretizaci on h se divide por 2 el error aproximadamente se
divide por 2 en el caso del metodo de Euler, por 2
2
en el caso del Euler mejorado y por
2
4
en el caso del Runge-Kutta de orden 4.
En la tabla 5.1 se reejan las magnitudes de los errores de discretizaci on obtenidos al
resolver el problema de valor inicial
y
= y +x,
y(0) = 1,
cuya soluci on analtica es conocida, y = x 1 + 2e
x
, mediante los metodos numericos
descritos, para distintos valores de h. Se puede observar claramente el orden de error de
cada uno de ellos.
Funciones de Matlab
MATLAB dispone de funciones para resolver numericamente problemas de valor ini-
cial, en los que intervienen ecuaciones diferenciales ordinarias de primer orden, mediante
5.6. APLICACIONES 65
algoritmos m as precisos que los descritos anteriormente. Se trata de algoritmos con pasos
de discretizaci on variable, de manera que van tomando el tama no del paso de discretiza-
ci on seg un el comportamiento de la soluci on. La funci on ode23 combina los metodos de
Runge-Kutta de segundo y tercer orden, y la ode45 los de cuarto y quinto orden.
5.6. Aplicaciones
5.6.1. Trayectorias ortogonales
En muchos campos de la Fsica se presenta con relativa frecuencia la necesidad de re-
solver problemas del tipo: dada una familia de curvas planas f(x, y, ) = 0, encontrar otra
familia g(x, y, ) = 0 con la propiedad de que ambas familias sean tales que en cada punto
se corten ortogonalmente. En este caso, tales familias se dicen trayectorias ortogonales.
Podemos citar los siguientes ejemplos de familias de curvas ortogonales: en Termodin ami-
ca, las lneas isotermas y las lneas de ujo de calor; en Hidrodin amica, las curvas de
potencial de velocidad y las lneas de corriente o lneas de ujo; y en Electrost atica, son
ortogonales las curvas equipotenciales y las lneas de fuerza.
Para determinar las trayectorias ortogonales a la familia f(x, y, ) = 0 se procede de
la manera siguiente. Derivando respecto a x, f
x
(x, y, ) = 0, y eliminando el par ametro
entre las dos ecuaciones se obtiene la e.d. cuyas curvas integrales son precisamente la
familia dada,
F(x, y,
dy
dx
) = 0.
En un punto (x, y) una curva de la familia f(x, y, ) = 0 tiene pendiente y
, y la ortogonal
ha de tener de pendiente
1
dy
dx
=
dx
dy
.
Por tanto, la familia de curvas ortogonales, g(x, y, ) = 0, se obtendr a de integrar la
ecuaci on diferencial
F(x, y,
dx
dy
) = 0.
Ejemplo 5.6.1 Las curvas equipotenciales de un determinado campo electrost atico se
pueden aproximar mediante elipses, x
2
2x + 2y
2
= 0. Encontrar las lneas de fuerza.
x
2
2x + 2y
2
= 0 =2x 2 + 4y y
= 0.
Eliminando entre las dos ecuaciones se obtiene la e.d. cuyas curvas integrales son la
familia de elipses
y
=
2y
2
x
2
4xy
.
66 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Por tanto, la familia de curvas ortogonales se obtiene resolviendo la e.d.
y
=
4xy
x
2
2y
2
,
ecuaci on homogenea, que mediante el cambio de variable dependiente, y = xv, se trans-
forma en una de variables separables
1
3
_
1
v
8v
3 + 2v
2
_
dv =
dx
x
,
cuya soluci on general es
|v|
3 + 2v
2
= K|x|
3
, K R
+
.
Deshaciendo el cambio, v = y/x, se obtiene la familia pedida, y
2
= K
2
x
6
(3x
2
+ 2y
2
).
Nota 5.6.1 Si F(x, y, y
) = 0 es la e.d. asociada a la familia f(x, y, ) = 0, entonces la
e.d. cuyas curvas integrales forman un angulo con la anterior familia es
F
_
x, y,
y
tg
1 +y
tg
_
= 0.
5.6.2. Deterioro radioactivo
Experimentalmente se ha encontrado que las sustancias radioactivas se descomponen
a una tasa proporcional a la cantidad de sustancia presente. Si en el instante t hay una
cantidad Q(t), se tendr a
dQ
dt
= k Q(t),
donde k es la constante de proporcionalidad. La soluci on general de la e.d. es Q(t) = C e
kt
,
con C constante arbitraria positiva.
Si Q(t
0
) = Q
0
, entonces Q(t) = Q
0
e
k(tt
0
)
, y si se conoce la cantidad de sustan-
cia en otro instante, Q(t
1
) = Q
1
, entonces es posible determinar la soluci on unica, que
permitir a conocer Q(t) en cualquier instante
Q(t) = Q
0
e
k(tt
0
)
, donde k =
ln Q
1
ln Q
0
t
1
t
0
.
La tasa de deterioro radioactivo se suele expresar en terminos de lo que se conoce con
el nombre de semivida, tiempo necesario para que una cantidad dada de sustancia se
reduzca a la mitad, es decir si Q
1
= Q
0
/2 la semivida ser a T
m
= t
1
t
0
tal que
k =
ln Q
0
/2 ln Q
0
T
m
k T
m
= ln 2,
lo que permite expresar la constante de proporcionalidad k en terminos de la semivida.
5.6. APLICACIONES 67
5.6.3. Eliminaci on de medicamentos
En muchos casos la cantidad de droga, A(t), que excede de un valor promedio, en la
corriente sangunea, disminuir a en forma proporcional a dicha cantidad excedente, lo que
signica
dA(t)
dt
= A(t), > 0.
La constante se llaman constante de eliminaci on, y T
e
= 1/ tiempo de eliminaci on.
5.6.4. Mecanica Elemental
Algunas de las aplicaciones m as importantes de las ecuaciones diferenciales de primer
orden se presentan en Mec anica Elemental.
Ejemplo 5.6.2 (Paracaidas) Un objeto de masa m se deja caer desde el reposo, en un
medio que presenta una resistencia proporcional a la magnitud de su velocidad instant anea
|v(t)|. Suponiendo que la fuerza gravitacional es constante, determinar la posici on y la
velocidad del objeto en cualquier instante t
ma =
F
i
m
dv
dt
= mg k v
dv
dt
=
k
m
v +g,
ecuaci on lineal cuya soluci on general es
v(t) =
mg
k
+C e
km
t
.
Dado que v(0) = 0, la velocidad en cualquier instante t es
v(t) =
mg
k
_
1 e
kt
m
_
.
Integrando, se obtiene
x(t) =
mg
k
_
t +
m
k
e
kt
m
_
+C,
y si x(0) = 0, la posici on en el instante t viene dada por
x(t) =
mg
k
_
t +
m
k
e
kt
m
m
k
_
.
5.6.5. Ley de enfriamiento de Newton
La tasa de cambio de temperatura de un cuerpo es proporcional a la diferencia entre
la temperatura del cuerpo y la temperatura del medio que le rodea. Es decir,
dT
dt
= k(T A) =T(t) = Ce
kt
+A.
68 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
5.6.6. Interes compuesto
Si una cantidad de dinero crece continuamente a una tasa del k por uno anual, la
cantidad acumulada al cabo de t a nos, responder a al siguiente modelo matem atico
dC
dt
= kC,
C(0) = C
0
lo que supone una cantidad acumulada de C(t) = C
0
e
kt
.
El interes de un a no es C(1) C(0) = C
0
(e
k
1), y el rendimiento, es decir la tasa de
interes efectiva
C(1) C(0)
C(0)
= e
k
1.
Por ejemplo, si el interes es del 5 % anual, compuesto continuamente, el rendimiento al
cabo de un a no es e
0,05
1 1,0513 1 = 0,0513, que corresponde a un rendimiento del
5.13 % anual.
Ejercicio 5.6.1 (Plan de pensiones) . Un se nor decide participar en un plan de pen-
siones con una aportaci on inicial de 10000 euros y dep ositos mensuales de 500 . Si le
garantizan un interes del 5 % anual cual es la cantidad que tendra garantizada al cabo
de 20 a nos?.
En este caso el capital crece por dos conceptos diferentes, por un lado debido a la
acumulaci on de intereses, y por otro debido a dep ositos que se hacen peri odicamente. El
problema es que mientras el interes crece de manera continua, los dep ositos crecen de
manera discreta.
Vamos a considerar tres modelos diferentes:
1. La entrada de las aportaciones es continua, es decir la aportaci on total a lo largo de
un a no es de 6000 euros, pero se hace de manera continua, como si de un grifo se
tratara que al nal de cada a no ha derramado 6000.
dC(t)
dt
= 0,05C(t) + 6000,
C(0) = 10000
cuya soluci on es
C(t) = 10
4
(13e
0,05t
12), 0 t 20.
En este caso se obtiene C(20) = 233.000 euros.
2. La entrada de las aportaciones es discreta, 6000 euros cada a no, y los intereses se
capitalizan por a nos.
5.6. APLICACIONES 69
En este caso hay que considerar un problema de valor inicial por cada a no, o resolver
el problema mediante transformadas de Laplace, que trataremos en un Captulo
posterior.
Para el primer a no el modelo es el siguiente:
dC(t)
dt
= 0,05C(t),
C(0) = 10000,
cuya soluci on es
C(t) = C(0)e
0,05t
, 0 t < 1; C(1) = C(0)e
0,05
+ 6000.
Para el segundo a no:
dC
1
(t)
dt
= 0,05C
1
(t),
C
1
(0) = C(1),
cuya soluci on es
C
1
(t) = C(1)e
0,05t
, 0 t < 1; C
1
(1) = C(1)e
0,05
+ 6000,
que, mediante una traslaci on, podemos poner
C(t) = C(1)e
0,05(t1)
, 1 t < 2, C(2) = C(1)e
0,05
+ 6000.
En general, para el a no i-esimo, i = 1, 2, 3, , 20, tenemos
C(t) = C(i 1)e
0,05(ti+1)
, i 1 t < i, C(i) = C(i 1)e
0,05
+ 6000.
Al cabo de los 20 a nos se obtienen 228.264 euros.
3. La entrada de las aportaciones es discreta, 5000 euros cada mes, y los intereses se
capitalizan por meses. Este modelo es el que se ajusta realmente al enunciado.
En este caso el modelo es an alogo al anterior, de modo que para el primer mes tenemos
dC(t)
dt
=
0,05
12
C(t),
C(0) = 10000,
cuya soluci on es
C(t) = C(0)e
(0,05/12)t
, 0 t < 1; C(1) = C(0)e
0,05/12
+ 500.
En general, para el mes i-esimo, i = 1, 2, 3, , 240, tenemos
C(t) = C(i 1)e
(0,05/12)(ti+1)
, i 1 t < i, C(i) = C(i 1)e
0,05/12
+ 500.
En esta modalidad el capital acumulado es de 232.947 euros.
70 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
5.7. Ejercicios
1. Consideremos la ecuaci on diferencial
y
=
y
2
+ 2xy
x
2
.
Es lineal?. Resolver dicha ecuaci on, encontrar la soluci on maximal que pasa por el
punto (1,1) y representarla gr acamente.
[Resp.: no; y =
x
2
2 x
, (0, 2).]
2. Consideremos la ecuaci on diferencial
(y
2
+ 2xy)dx x
2
dy = 0.
a) Demostrar que no es exacta.
b) Encontrar un factor integrante de la forma y
n
, n Z.
c) Resolver la nueva ecuaci on diferencial.
d) Demostrar que y = 0 es soluci on de la e.d. dada, pero no de la resultante de
multiplicar por el factor integrante. Justicar la respuesta.
e) Representar la curva integral que pasa por el punto (2, 1) e indicar el intervalo
de validez de dicha soluci on. [Resp.:
(y) =
1
y
2
; y =
x
2
x +k
; y =
x
2
x + 2
, (0, ).]
3. Consideremos el problema de valor inicial
y
(tan x)y cos x = 0
y(/4) = 0.
a) Cual es el m aximo intervalo de validez de su soluci on?.
b) Encontrar la soluci on general de la ecuaci on diferencial, y la del problema de
valor inicial. [Resp.:
_
2
,
2
_
; y =
1
2
sen x +
1
cos x
_
x
2
+C
_
.]
4. Dado el problema de valor inicial
dy
dx
= 1 +y
2
y(0) = 0
a) Vericar que cumple las condiciones sucientes dadas por el teorema de exis-
tencia en [1, 1] [1, 1].
5.7. EJERCICIOS 71
b) Integrar el problema de valor inicial.
c) Encontrar tres terminos de la sucesi on generada por el metodo de las apro-
ximaciones sucesivas de Picard, y representar dichas funciones en el intervalo
jado por el teorema de existencia.
5. Se considera la familia de curvas y
2
(C x) = x
3
.
a) Representar alg un miembro de la familia.
b) Obtener la familia de trayectorias ortogonales.
c) Expresar la familia obtenida en coordenadas polares y representar gr acamente
algunos de sus miembros.
6. Una sustancia A reacciona con una sustancia B para dar una nueva sustancia C
seg un la reacci on A+B C. Supongamos que a y b son los moles iniciales de A
y B y que x(t) son los moles de C en el tiempo t. La velocidad de formaci on de C
viene dada mediante la ecuaci on diferencial
dx(t)
dt
= k(a x)(b x), k R
+
Considerando los casos a = b o a = b
a) Determinar x(t), siendo x(0) = 0.
b) Calcular lm
t+
x(t), y representar gr acamente x(t), (t > 0).
7. Dada la ecuaci on de Ricatti
y
=
y
2
x
2
y 2x
1 x
3
se pide:
a) Comprobar que admite una soluci on particular de la forma y
1
(x) = kx
n
, n N.
b) Mediante un cambio de variable adecuado transformarla en una lineal, y en-
contrar la soluci on general.
c) Calcular la soluci on que pasa por el punto (0, 1), representarla gr acamente e
indicar el intervalo de validez. [Resp.:
y = x
2
; y =
1 kx
2
k x
; y = 1 +x, (, 1)].
8. a) Enunciar alguna versi on del teorema de existencia y unicidad del p.v.i.
y
= f(x, y); y(x
0
) = y
0
.
72 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
b) Aplicando el teorema anterior, demostrar que el p.v.i.
y
=
y
2
+ 1
x
2
+ 1
; y(0) = 2,
tiene una unica soluci on. Resolver la ecuaci on diferencial, mediante el metodo
de separaci on de variables, encontrar la soluci on del p.v.i., indicar el intervalo
de validez y representarla gr acamente.
c) Comprobar que la e.d. del apartado anterior tiene una soluci on en forma de
funci on polin omica de primer grado. Encontrar dicha soluci on y, teniendo en
cuenta que se trata de una ecuaci on de Ricatti, hacer el cambio de variable
adecuado para calcular su soluci on general. Encontrar la soluci on que pasa
por el punto (0, 2), y comprobar que es la misma curva que la obtenida en el
apartado anterior.
[Resp.: y =
x +k
1 kx
; y =
x + 2
1 2x
, (,
1
2
); y
1
(x) = x.]
9. Dada la ecuaci on diferencial M(x, y) +N(x, y)y
= 0,
a) Denir factor integrante (x, y).
b) Deducir la ecuaci on en derivadas parciales que permite calcular un factor inte-
grante.
c) En el caso = (y) escribir dicha ecuaci on.
d) Resolver la ecuaci on diferencial
cos x + (y + sen y + sen x)y
= 0
sabiendo que admite un factor integrante de la forma = (y).
[Resp.: e
y
(sen x +y 1) +
1
2
e
y
(sen y cos y) = C.]
10. Cuando se dispara una bala en un banco de arena, su desaceleraci on en cada ins-
tante es igual a la raz cuadrada de su velocidad en dicho instante. Cuanto tiempo
tardar a en detenerse si su velocidad de entrada en el banco de arena es de 36 m/sg.?
[Resp.: 12 s.]
11. a) Comprobar si la funci on
y(x) =
_
0, si x 3,
(x 3)
2
, si x > 3,
5.7. EJERCICIOS 73
es soluci on del problema de valor inicial
y
= 2
y,
y(0) = 0,
en el intervalo (, ). Existe alguna otra soluci on del mismo problema en el
mismo intervalo?. Hay contradicci on con el teorema de existencia y unicidad?.
Razona las respuestas
b) Consideremos la e.d. (2xy
2
3y
3
) + (7 3xy
2
)y
= 0.
1) Comprobar que admite un factor integrante de la forma = (y) y deter-
minarlo.
2) Encontrar la soluci on general de la ecuaci on diferencial, y la curva soluci on
que pasa por el punto (0, 1).
[Resp.: Si; Si; No hay contradicci on; (y) =
1
y
2
; x
2
3xy
7
y
= 7]
12. Dado el problema de valor inicial
dy
dt
=
1 +y
2
ty(1 +t
2
)
,
y(1) = 3,
estudiar la existencia y unicidad de soluci on y resolverlo.
[Resp.: y =
_
19t
2
1
1 +t
2
denida en
_
_
1
19
,
_
].
13. Hallar la ecuaci on diferencial asociada al haz de elipses
x
2
a
2
+y
2
= 1
y comprobar que al resolverla se obtiene, efectivamente, dicha familia de curvas.
Encontrar la familia de trayectorias ortogonales al haz de elipses.
[Resp.:
x
2
2
+
y
2
2
ln y = K].
14. Consideremos la ecuaci on diferencial
a
dy
dx
+b y = k e
x
, a, b, k > 0, 0.
a) Clasicarla, resolverla y discutir la soluci on seg un que = b/a o = b/a.
74 CAP
ITULO 5. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
b) Calcular el lmite al que tiende la soluci on, cuando x , en los casos = 0
y > 0.
[Resp.: y =
k
a
e
b
a
x
x +C e
b
a
x
, y =
k
b a
e
x
+C e
b
a
x
].
15. El deterioro radiactivo viene dado por la ecuaci on diferencial
dQ
dt
= kQ(t). Calcular
la constante k, en el caso del is otopo de uranio U
238
para el cual se sabe que su
semivida es T
m
= 4,5 10
9
a nos.
Captulo 6
Ecuaciones diferenciales lineales de
orden n
6.1. Motivaci on
Vamos a introducir las ecuaciones diferenciales lineales de segundo orden con un ejem-
plo muy simple, que simula diversas situaciones fsicas relacionadas con las vibraciones
(osciladores en Mec anica Cu antica, pendulo simple u oscilaciones de vigas).
Imaginemos un cuerpo de masa m, que descansa sin fricci on sobre un plano horizontal,
de modo que solo puede moverse en una direcci on. Un extremo del cuerpo est a sujeto a
un resorte, que a su vez est a sujeto a una pared, y el otro extremo est a acoplado a un
amortiguador. (Ver Figura 6.1).
Supondremos que el resorte resiste tanto al estiramiento como a la compresi on y que
el amortiguador absorbe los choques y produce una fuerza en la direcci on del movimiento
de la masa
Si denotamos con x la distancia de la masa a la posici on de equilibrio (x > 0 cuando
el resorte est a estirado y x < 0 cuando est a comprimido), de acuerdo con la ley de Hooke,
para peque nos desplazamientos, la fuerza restauradora F
S
, que el resorte ejerce sobre la
masa, es proporcional a la distancia a la que el resorte se ha estirado o comprimido
F
S
= kx,
donde k, constante del resorte, ha de ser positiva ya que F
S
y x tendr an signos opuestos.
En cuanto al amortiguador, supondremos que est a dise nado de tal modo que la fuerza
que ejerce sea proporcional a la velocidad de la masa
F
R
= cv = c
dx
dt
, c > 0.
La constante positiva, c, se llama constante de amortiguamiento. En terminos m as gene-
rales podemos considerar a F
R
como una fuerza especca de fricci on en nuestro sistema,
75
76 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Figura 6.1: Sistema masa-resorte-amortiguador
incluyendo, por ejemplo, la resistencia del aire.
Si adem as de estas fuerzas, la masa est a sujeta a la acci on de una fuerza externa f(t),
entonces la fuerza total que act ua sobre la masa es F = F
S
+ F
R
+ f(t), y por la ley de
Newton tenemos mx
= kx cx
+f(t), es decir
mx
+cx
+kx = f(t),
ecuaci on diferencial de segundo orden lineal, que gobierna el movimiento de la masa.
Si no hay amortiguador (c = 0), y despreciamos todas las fuerzas de rozamiento,
el movimiento se dice no amortiguado, y en otro caso (c > 0) amortiguado. Si no hay
fuerza externa, f(t) = 0, el movimiento se dice libre y en otro caso forzado. Una vez que
veamos los metodos de resoluci on de estas ecuaciones trataremos en detalle estos tipos de
movimientos que acabamos de describir.
6.2. Ecuaciones lineales de segundo orden
Empezaremos estudiando las ecuaciones lineales de segundo orden, ya que la mayor
parte de ideas y procedimientos se generalizan f acilmente a las de orden superior.
La ecuaci on diferencial de segundo orden es una ecuaci on de la forma
F(x, y, y
, y
) = 0,
donde x [a, b] es la variable independiente e y C
2
[a, b] la funci on inc ognita o variable
dependiente.
6.2. ECUACIONES LINEALES DE SEGUNDO ORDEN 77
Figura 6.2: Soluci on unica del p.vi. (car acter local)
La teora asociada a este tipo de ecuaciones es bastante compleja y nos limitaremos a
ecuaciones de la forma
y
= f(x, y, y
).
Para este supuesto, enunciaremos el siguiente teorema, an alogo al demostrado para el caso
de ecuaciones de primer orden
Teorema 6.2.1 Si las funciones f, f
y
y f
v
, donde v = y
, son continuas en un dominio
D R
3
, y el punto (x
0
, y
0
, y
0
) D, entonces existe un intervalo (x
0
h, x
0
+ h) en el
cual existe una soluci on unica del problema de valor inicial
y
= f(x, y, y
)
y(x
0
) = y
0
y
(x
0
) = y
0
.
Tal como ha quedado de maniesto, en general, y concretamente en el caso en que la
funci on f es no lineal, el teorema de existencia y unicidad tiene un car acter local. (Ver
Figura 6.2)
Estudiaremos fundamentalmente ecuaciones en las que la funci on f sea lineal en y e
y
, que denominaremos ecuaciones lineales, es decir, ecuaciones de la forma
y
+p(x)y
+q(x)y = r(x).
En este caso, el resultado de existencia y unicidad tiene car acter global. (Ver Figura
6.3).
78 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Figura 6.3: Soluci on unica del p.vi. (car acter global)
Teorema 6.2.2 Si p, q, r C
0
[a, b], x
0
[a, b], y
0
, y
0
R n umeros cualesquiera, entonces
el problema de valor inicial
y
+p(x)y
+q(x)y = r(x)
y(x
0
) = y
0
y
(x
0
) = y
0
tiene una y s olo una soluci on en [a, b].
6.2.1. Soluci on general de la ecuaci on homogenea
Proposici on 6.2.3 Si y
1
(x) e y
2
(x) son soluciones de la ecuaci on homogenea
y
+p(x)y
+q(x)y = 0,
entonces y
1
(x) +y
2
(x) tambien lo es cualesquiera que sean , R.
En realidad y
1
(x) + y
2
(x) es la soluci on general si y
1
(x) e y
2
(x) son linealmente
independientes, lo cual se comprueba f acilmente haciendo uso del wronskiano.
6.2. ECUACIONES LINEALES DE SEGUNDO ORDEN 79
Denici on 6.2.1 (wronskiano) Dadas dos funciones f, g denidas en un intervalo [a, b],
se dene el wronskiano de dichas funciones en el punto x
0
[a, b] como
W (f(x
0
), g(x
0
)) =
f(x
0
) g(x
0
)
f
(x
0
) g
(x
0
)
.
Proposici on 6.2.4 Si p, q C
0
[a, b] y si y
1
(x) e y
2
(x) son soluciones de la ecuaci on
homogenea en un intervalo [a, b] y existe al menos un punto x
0
[a, b], en el cual
W (y
1
(x
0
), y
2
(x
0
)) = 0, entonces toda soluci on de la ecuaci on homogenea puede poner-
se en la forma
y(x) = y
1
(x) +y
2
(x).
Reducci on del orden
Para calcular la soluci on general de la ecuaci on homogenea y
+ p(x)y
+ q(x)y = 0
es preciso conocer dos soluciones linealmente independientes. No obstante, conocida una
soluci on y
1
(x) es posible encontrar otra linealmente independiente de ella mediante un
metodo, debido a DAlembert (1717-83), que consiste en ensayar una soluci on de la forma
y
2
(x) = v(x)y
1
(x). Al imponer que y
2
(x) sea soluci on de la ecuaci on homogenea se obtiene
v
+
_
p(x) +
2y
1
(x)
y
1
(x)
_
v
= 0,
ecuaci on lineal de segundo orden en v, pero lineal de primer orden en v
y por tanto
f acilmente integrable. Al no estar interesados en encontrar la funci on v(x) m as general
posible, que satisfaga las condiciones anteriores, no es necesario conservar las constantes
de integraci on que aparecen al integrar sucesivamente la ecuaci on en v(x). Conocida v(x),
se calcula y
2
(x) = v(x)y
1
(x).
Ecuaci on homogenea con coecientes constantes
Consideremos la ecuaci on y
+ py
+ qy = 0, p, q R. Buscamos una funci on y(x)
tal que la combinaci on lineal de y, y
e y
, con escalares q, p y 1 se anule. Dado que las
unicas funciones que permanecen proporcionales a s mismas cuando se derivan son las
exponenciales, ser an de esta forma las soluciones de esta ecuaci on.
Si y = e
rx
es soluci on de la ecuaci on, e
rx
(r
2
+pr +q) = 0, y por tanto
r
2
+pr +q = 0,
que recibe el nombre de ecuaci on caracterstica.
1. p
2
4q > 0. La ecuaci on caracterstica tiene dos races reales distintas r
1
, r
2
, y las
dos soluciones linealmente independientes son
y
1
(x) = e
r
1
x
, y
2
(x) = e
r
2
x
.
80 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
2. p
2
4q = 0. La ecuaci on caracterstica tiene una raz real doble r
1
= r
2
= p/2.
Una soluci on es y
1
(x) = e
px/2
y, por reducci on del orden, se obtiene la segunda
soluci on y
2
(x) = xe
px/2
. Es decir
y
1
(x) = e
p
2
x
, y
2
(x) = xe
p
2
x
.
3. p
2
4q < 0. La ecuaci on caracterstica tiene dos races complejas conjugadas r
1
=
a +bi, r
2
= a bi. Dos soluciones linealmente independientes son
e
r
1
x
= e
(a+bi)x
= e
ax
(cos bx +i sen bx)
e
r
2
x
= e
(abi)x
= e
ax
(cos bx i sen bx).
Se trata de combinaciones lineales de dos funciones linealmente independientes
(e
ax
cos bx, e
ax
sen bx) en el campo complejo. Si queremos limitarnos a las soluciones
de la ecuaci on diferencial en el campo real, tomaremos como soluciones linealmente
independientes de la ecuaci on homogenea precisamente
y
1
(x) = e
ax
cos bx, y
2
(x) = e
ax
sen bx.
6.2.2. Ecuaci on no homogenea
Hasta ahora hemos visto la manera de encontrar la soluci on general de la ecuaci on
homogenea en el caso en que los coecientes son constantes, o en el caso, en que no siendo
constantes, conocamos una soluci on de la ecuaci on.
Estudiaremos ahora la ecuaci on no homogenea
y
+p(x)y
+q(x)y = r(x).
Proposici on 6.2.5 La soluci on general de la ecuaci on no homogenea es la suma de una
combinaci on lineal de dos soluciones linealmente independientes de la ecuaci on homogenea
y cualquier soluci on de la no homogenea.
Es decir, si y
1
(x) e y
2
(x) son soluciones linealmente independientes de la ecuaci on
homogenea e y
p
(x) es cualquier soluci on particular de la ecuaci on no homogenea, entonces
la soluci on general de la ecuaci on no homogenea es
y(x) = y
1
(x) +y
2
(x) +y
p
(x).
6.2. ECUACIONES LINEALES DE SEGUNDO ORDEN 81
Metodo de coecientes indeterminados
Consiste en hacer una hip otesis sobre la forma de la soluci on particular de la ecuaci on
no homogenea, sustituir esta funci on, que contendr a uno o m as coecientes indetermina-
dos, en la ecuaci on diferencial, y calcular dichos coecientes de manera que la funci on sea
realmente soluci on de la ecuaci on.
Para una ecuaci on diferencial completamente arbitraria se puede decir muy poco. Sin
embargo, si la ecuaci on es de coecientes constantes
y
+py
+qy = r(x), p, q R,
y si el termino no homogeneo, r(x), es una funci on exponencial e
ax
, un polinomio a
0
x
n
+
a
1
x
n1
+ + a
n
, una funci on de car acter senoidal (sen bx o cos bx), o un producto de
funciones de estos tipos, pueden darse reglas para localizar una soluci on particular.
r(x) y
p
(x)
p
n
(x) = a
0
x
n
+a
1
x
n1
+ +a
n
x
s
(A
0
x
n
+A
1
x
n1
+ +A
n
)
ae
x
Ax
s
e
x
a cos x +b sen x x
s
(Acos x +Bsen x)
p
n
(x)e
x
x
s
P
n
(x)e
x
p
n
(x) cos x +q
m
(x) sen x x
s
[P
N
(x) cos x +Q
N
(x) sen x],
donde q
m
= b
0
x
m
+ +b
m
N=max(m, n), Q
N
= B
0
x
N
+ +B
n
ae
x
cos x +be
x
sen x x
s
[Ae
x
cos x +Be
x
sen x]
p
n
(x)e
x
cos x +q
m
(x)e
x
sen x x
s
e
x
[P
N
(x) cos x +Q
N
(x) sen x], N=max(m, n)
Si alg un termino de la soluci on tentativa y
p
(x) ya es soluci on de la ecuaci on homogenea,
entonces se multiplica por x
s
, donde s es el menor n umero entero no negativo tal que
ning un termino de la nueva expresi on sea soluci on de la ecuaci on homogenea.
En el caso presente, ecuaciones de segundo orden, s solamente podr a tomar los valores
0, 1 o 2, excepto cuando las races de la ecuaci on caracterstica sean complejas, que
solamente podr a tomar los valores 0 o 1. Por ejemplo, si r(x) = ae
x
se ensayar a como
soluci on particular de la ecuaci on no homogenea y
p
(x) = Ae
x
si no es raz de la ecuaci on
caracterstica (e
x
no es soluci on de la ecuaci on homogenea), Axe
x
si es raz simple
de la ecuaci on caracterstica (e
x
es soluci on de la ecuaci on homogenea) y, nalmente,
Ax
2
e
x
si es raz doble de la ecuaci on caracterstica (e
x
y xe
x
son soluciones de la
ecuaci on homogenea)
Tambien se puede aplicar el metodo de coecientes indeterminados, con algunos ajus-
tes, en algunos casos de coecientes variables, por ejemplo cuando p(x), q(x) y r(x) son
polinomios.
82 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Metodo de variaci on de parametros
El metodo de coecientes indeterminados est a aconsejado para las ecuaciones dife-
renciales lineales con coecientes constantes y el termino no homogeneo de una forma
conveniente. Veamos a continuaci on un metodo general para determinar una soluci on
particular de la ecuaci on
y
+p(x)y
+q(x)y = r(x),
donde p, q y r son funciones continuas en un determinado intervalo.
Supongamos y
1
(x) e y
2
(x) soluciones linealmente independientes de la ecuaci on ho-
mogenea. El metodo de variaci on de par ametros consiste en determinar dos funciones
v
1
(x) y v
2
(x) tales que
y
p
(x) = v
1
(x)y
1
(x) +v
2
(x)y
2
(x)
sea soluci on de la ecuaci on no homogenea. Observar que v
1
(x) y v
2
(x) constantes no
servir an, ya que en ese caso la combinaci on lineal anterior sera soluci on de la ecuaci on
homogenea.
Al imponer que y
p
(x) sea soluci on de la ecuaci on no homogenea, y una segunda condi-
ci on que ser a impuesta para facilitar los c alculos, se obtienen dos ecuaciones que relacionan
v
1
(x) y v
2
(x),
y
p
(x) = v
1
(x)y
1
(x) +v
2
(x)y
2
(x) +v
1
(x)y
1
(x) +v
2
(x)y
2
(x)
Si imponemos la condici on v
1
(x)y
1
(x) +v
2
(x)y
2
(x) = 0, resulta
y
p
(x) = v
1
(x)y
1
(x) +v
2
(x)y
2
(x) +v
1
(x)y
1
(x) +v
2
(x)y
2
(x),
y al sustituir y
p
(x), y
p
(x) e y
p
(x) en la ecuaci on diferencial y, como consecuencia de que
y
1
(x) e y
2
(x) son soluciones de la ecuaci on homogenea, resulta
v
1
(x)y
1
(x) +v
2
(x)y
2
(x) = r(x).
Por tanto, hemos obtenido el sistema
y
1
(x)v
1
(x) +y
2
(x)v
2
(x) = 0
y
1
(x)v
1
(x) +y
2
(x)v
2
(x) = r(x),
cuya soluci on es
v
1
(x) =
r(x)y
2
(x)
W (y
1
(x), y
2
(x))
, v
2
(x) =
r(x)y
1
(x)
W (y
1
(x), y
2
(x))
.
Se calculan primitivas de v
1
(x) y v
2
(x) y se obtiene la soluci on particular.
Si unicamente se conoce una soluci on de la ecuaci on homogenea, y
1
(x), se puede cal-
cular, por reducci on del orden, una segunda soluci on de la ecuaci on homogenea, y a
6.3. VIBRACIONES MEC
ANICAS 83
continuaci on, por variaci on de par ametros, una soluci on particular. O tambien, direc-
tamente, imponer que y(x) = v(x)y
1
(x) sea soluci on de la ecuaci on no homogenea. Se
obtiene una ecuaci on lineal de segundo orden en v(x) no homogenea, que se puede reducir
de orden. Si se integra sucesivamente, y se conservan las constantes arbitrarias, se obtiene
simult aneamente la soluci on general de la ecuaci on homogenea y la soluci on particular de
la no homogenea.
6.3. Vibraciones mecanicas
Volvamos al ejemplo de la secci on 1, y consideremos los distintos casos que pueden
presentarse.
6.3.1. Movimiento libre no amortiguado. Oscilador arm onico
En este caso no hay amortiguador ni fuerzas externas, por lo cual la ecuaci on se reduce
a
mx
+kx = 0 x
+
2
0
x = 0, si
0
=
_
k
m
.
La soluci on general de esta ecuaci on es de la forma
x(t) = cos
0
t +sen
0
t, , R,
o, equivalentemente
x(t) = C cos(
0
t ), C R
+
, [0, 2).
La constante C es la amplitud del movimiento, el angulo de fase y
0
la frecuen-
cia angular. Se trata de un movimiento peri odico, de periodo (tiempo necesario para
completar una oscilaci on) T = 2/
0
, y frecuencia natural o simplemente frecuencia
(n umero de oscilaciones por segundo) 1/T =
0
/2. La frecuencia se mide en hertzios, 1
Hz= 1 ciclo/sg.
En la gura 6.4 est a representada la funci on
x(t) = 2 cos(2t
3
),
soluci on del problema de valor inicial
x
+ 4x = 0
x(0) = 1
x
(0) = 2
3
84 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
0 1 2 3 4 5 6 7 8 9 10
4
3
2
1
0
1
2
3
4
Figura 6.4: Movimiento libre no amortiguado
6.3.2. Movimiento libre amortiguado
Corresponde al caso
mx
+cx
+kx = 0 x
+ 2px
+
2
0
x = 0,
0
=
_
k
m
, p =
c
2m
.
Las races de la ecuaci on caracterstica son r = p
_
p
2
2
0
, donde el discriminante
p
2
2
0
=
c
2
4m
2
4mk
4m
2
=
c
2
4mk
4m
2
.
Si c = c
R
=
4mk, el movimiento se dice crticamente amortiguado. En este caso la
soluci on general de la ecuaci on es
x(t) = e
pt
+te
pt
,
y la soluci on unica del problema de valor inicial
x
+ 2px
+
2
0
x = 0
x(0) = x
0
x
(0) = v
0
(6.1)
es x(t) = e
pt
(x
0
+ (v
0
+px
0
)t), en la cual puede observarse que el cuerpo pasa por
la posici on de equilibrio a lo sumo una vez, en el caso x
0
(v
0
+px
0
) < 0.
6.3. VIBRACIONES MEC
ANICAS 85
0 1 2 3 4 5 6 7 8 9 10
2
1.5
1
0.5
0
0.5
1
1.5
2
v0=5
v0=0
v0=10
Figura 6.5: Movimiento libre sobreamortiguado
Si c > c
R
, el movimiento se dice sobreamortiguado, las dos races de la ecuaci on
caracterstica, r
1
y r
2
, son reales
r
1
= p +
_
p
2
2
0
, r
2
= p
_
p
2
2
0
,
pero negativas, con lo cual la soluci on general
x(t) = e
r
1
t
+e
r
2
t
,
tambien tiende a 0 cuando t y, asimismo, el cuerpo pasa por la posici on de
equilibrio a lo sumo una vez. Por ejemplo, si x
0
> 0 la unica soluci on del problema de
valor inicial 6.2 se anula una vez si v
0
< x
0
r
2
. Por ejemplo, si consideramos el problema
de valor inicial
x
+ 5x
+ 4x = 0
x(0) = x
0
x
(0) = v
0
(6.2)
su soluci on unica es
x(t) =
4x
0
+v
0
3
e
t
x
0
+v
0
3
e
4t
.
En la Figura 6.5 est an representadas las soluciones con las condiciones iniciales x
0
= 1
y v
0
= 5, v
0
= 0, v
0
= 10.
Si c < c
R
, el movimiento se dice subamortiguado, las dos races de la ecuaci on
caracterstica, r
1
y r
2
, son de la forma
r
1
= p +i
_
2
0
p
2
= p +i
1
, r
2
= p i
1
,
86 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
y la soluci on general de la ecuaci on es
x(t) = e
pt
(cos
1
t +sen
1
t) = Ce
pt
cos(
1
t ).
Como se ve, la soluci on es el producto de un factor exponencial, Ce
pt
, llamado factor
de amortiguaci on y un factor senoidal, cos(
1
t). El movimiento no es peri odico, pero
sin embargo a
1
se le suele llamar frecuencia angular y a T
1
= 2/
1
pseudoperiodo
de oscilaci on.
0 1 2 3 4 5 6 7 8 9 10
4
3
2
1
0
1
2
3
4
0 1 2 3 4 5 6 7 8 9 10
4
3
2
1
0
1
2
3
4
Figura 6.6: Movimiento libre subamortiguado
En las guras 6.6 se presentan dos casos de subamortiguamiento. Cuando la constante
de amortiguamiento es peque na el movimiento decae m as lentamente,
x
+ 2x
+ 4x = 0,
x(0) = 1,
x
(0) = 0,
tiene por soluci on unica x(t) =
2
3
e
t
cos
_
3
6
_
. Ver Figura 6.7. Los puntos de corte
con el eje Ot corresponden a los valores
t =
1
3
_
6
+ (2n 1)
2
_
,
los puntos de contacto con la exponencial
2
3
e
t
,
t =
1
3
_
6
+ 2n
_
,
6.3. VIBRACIONES MEC
ANICAS 87
0 0.5 1 1.5 2 2.5 3 3.5 4
1.5
1
0.5
0
0.5
1
1.5
Figura 6.7: Movimiento libre subamortiguado
los puntos de contacto con la exponencial
2
3
e
t
,
t =
1
3
_
6
+ (2n 1)
_
,
y los puntos crticos (m aximos y mnimos)
t =
n
3
.
6.3.3. Movimiento forzado no amortiguado
El caso m as interesante es cuando la fuerza externa es peri odica, por ejemplo
mx
+kx = F
0
cos t =x
+
2
0
x =
F
0
m
cos t.
Si =
0
, se comprueba que la soluci on general es
x(t) = cos
0
t +sen
0
t +
F
0
m(
2
0
2
)
cos t.
Si el cuerpo est a inicialmente en reposo, es decir
mx
+kx = F
0
cos t
x(0) = 0
x
(0) = 0
88 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
0 1 2 3 4 5 6 7 8 9 10
4
3
2
1
0
1
2
3
4
Figura 6.8: Movimiento forzado no amortiguado. Pulsaciones
la soluci on es de la forma
x(t) =
F
0
m(
2
0
2
)
(cos t cos
0
t),
suma de dos funciones peri odicas, de distintos periodos pero con la misma amplitud. La
soluci on tambien puede ponerse en la forma
x(t) =
2F
0
m(
2
0
2
)
sen
(
0
)t
2
sen
(
0
+)t
2
.
Si |
0
| es peque na, sen(
0
+)t/2 es una funci on r apidamente oscilante, comparada con
sen(
0
)t/2. El movimiento es una oscilaci on r apida con frecuencia angular (
0
+)/2,
pero con una amplitud senoidal que vara lentamente. Este tipo de movimiento que tiene
una variaci on peri odica de la amplitud, presenta lo que se llama pulsaci on.
Un ejemplo del fen omeno de pulsaci on es el siguiente modelo
x
+ 256x = 60 cos 14t
x(0) = 0
x
(0) = 0,
cuya soluci on, x(t) = 2 sen 15t sen t, se representa en la Figura 6.8.
Cuando la frecuencia angular del sistema y de la fuerza externa coinciden, es decir
=
0
, se presenta el fen omeno conocido con el nombre se resonancia, de gran interes
en Ingeniera, puesto que si las vibraciones de un sistema entran en resonancia con las de
6.3. VIBRACIONES MEC
ANICAS 89
la fuerza externa pueden producirse grandes desastres (puentes que se caen, alas de avi on
que se rompen, etc.), tal como puede apreciarse en el siguiente ejemplo, al observar que
la amplitud de la oscilaci on aumenta indenidamente.
En efecto, si =
0
la soluci on general de la ecuaci on es de la forma
x(t) = cos
0
t +sen
0
t +
F
0
2m
0
t sen
0
t.
Por ejemplo, el problema de valor inicial
x
+ 9x = 2 cos 3t
x(0) = 0
x
(0) = 0,
tiene como soluci on unica
x(t) =
1
3
t sen 3t.
Si las condiciones iniciales son x(0) = 1 y x
(0) = 0 la soluci on es
x(t) = cos 3t +
1
3
t sen 3t.
Ambas funciones se representan en la Figura 6.9
0 1 2 3 4 5 6 7 8 9 10
5
4
3
2
1
0
1
2
3
4
5
0 1 2 3 4 5 6 7 8 9 10
5
4
3
2
1
0
1
2
3
4
5
Figura 6.9: Movimiento forzado no amortiguado. Resonancia
6.3.4. Movimiento forzado amortiguado
En este caso la ecuaci on es de la forma x
+ 2px
+
2
0
x = f(t), donde f(t) la supon-
dremos, nuevamente, peri odica. La soluci on general de esta ecuaci on es
x(t) = x
h
(t) +x
p
(t) = x
1
(t) +x
2
(t) +x
p
(t),
90 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
0 1 2 3 4 5 6 7 8 9 10
4
3
2
1
0
1
2
3
4
Figura 6.10: Movimiento forzado amortiguado
donde x
1
(t) y x
2
(t) son soluciones linealmente independientes de la ecuaci on homogenea
que, en este caso, siempre tienden a 0 cuando t , por lo que a x
h
(t) se le llama
soluci on transitoria, mientras que a x
p
(t) se le llama soluci on estacionaria, que es la
unica que permanece para valores grandes de t.
Tal situaci on puede apreciarse perfectamente en la Figura 6.10, donde se representa
la funci on
x(t) =
1
15
_
17e
4t
+ 62e
t
_
+
3
10
sen 2t,
soluci on del problema de valor inicial
x
+ 5x
+ 4x = 3 cos 2t
x(0) = 3
x
(0) = 1.
En la citada Figura se ve como la soluci on transitoria ejerce su inuencia unicamente
hasta, aproximadamente, el valor t = 4
6.4. Ecuaci on lineal de orden n (n > 2)
Si en el ejemplo considerado al principio del captulo, sistema masa-resorte-amortiguador,
cambiamos el amortiguador por otro cuerpo de masa m
2
, acoplado mediante un resorte
al cuerpo de masa m
1
, obtenemos lo que podemos denominar sistema masa-resorte aco-
plado. Es decir, se trata de un cuerpo de masa m
1
sujeto a un resorte, cuya constante de
6.4. ECUACI
ON LINEAL DE ORDEN N (N > 2) 91
Figura 6.11: Sistema masa-resorte acoplado
recuperaci on es k
1
, que est a sujeto a una pared. Por otra parte existe un segundo cuerpo,
de masa m
2
, sujeto a un resorte, de constante k
2
, que a su vez est a sujeto al cuerpo de
masa m
1
, tal como se puede apreciar en la Figura 6.11.
Suponemos que la supercie es totalmente lisa, de modo que se desprecia cualquier
tipo de rozamiento, y que los cuerpos solamente pueden moverse en una direcci on. Por
tanto, las unicas fuerzas que act uan son las ejercidas por los resortes. En este caso, si los
cuerpos se desplazan de su posici on de equilibrio, el resorte 1 ejercer a una fuerza F
1
sobre
el cuerpo de masa m
1
, y el resorte 2 ejercer a una fuerza F
2
sobre el cuerpo de masa m
1
y
una fuerza F
3
sobre el cuerpo de masa m
2
, cuyas magnitudes ser an, aplicando la Ley de
Hooke
F
1
= k
1
x
F
2
= k
2
(y x)
F
3
= k
2
(y x),
donde x es la elongaci on del primer resorte, e y x la del segundo.
Aplicando la segunda Ley de Newton a estos cuerpos se obtiene
m
1
d
2
x
dt
2
= k
1
x +k
2
(y x)
m
2
d
2
y
dt
2
= k
2
(y x).
Se trata de un sistema de dos ecuaciones diferenciales de segundo orden, que se puede
reducir a una si, por ejemplo, despejamos y(t) en la primera ecuaci on y sustituimos en la
segunda, obteniendo
m
1
m
2
k
2
d
4
x
dt
4
+
k
1
m
2
+k
2
(m
1
+m
2
)
k
2
d
2
x
dt
2
+k
1
x = 0,
92 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
que es una ecuaci on lineal de orden 4, con coecientes constantes. Una vez resuelta, y
conocida la funci on x(t), ya se puede calcular tambien y(t).
Si consideramos el ejemplo con los siguientes datos: m
1
= 2, m
2
= 1, k
1
= 4 y k
2
= 2,
suponemos que desplazamos los dos cuerpos 3 unidades desde la posici on de equilibrio, y
los soltamos con velocidad inicial 0, se obtiene
y(t) = 3x +
d
2
x
dt
2
d
4
x
dt
4
+ 5
d
2
x
dt
2
+ 4x = 0
x(0) = 3
y(0) = 3
x
(0) = 0
y
(0) = 0.
La ecuaci on de cuarto orden en x(t) es de coecientes constantes, por lo que, al igual que
en las de orden 2, dar a lugar a soluciones de forma exponencial x(t) = e
rt
. Se obtiene
como soluci on general
x(t) =
1
cos t +
2
sen t +
3
cos 2t +
4
sen 2t
y(t) = 2
1
cos t + 2
2
sen t
3
cos 2t
4
sen 2t,
1
,
2
,
3
,
4
R,
que al considerar las condiciones iniciales d a lugar a la soluci on unica
x(t) = 2 cos t + cos 2t
y(t) = 4 cos t cos 2t,
que describe el movimiento de los dos cuerpos alrededor de la posici on de equilibrio.
En la Figura 6.12 est an representadas las trayectorias referidas a sus respectivas po-
siciones de equilibrio, y referidas a un mismo sistema de referencia, en el supuesto que
la posici on de equilibrio del cuerpo de masa m
2
este a una distancia de 5 unidades de la
equilibrio del cuerpo de masa m
1
.
En general, ser a muy complicado resolver ecuaciones diferenciales de orden mayor que
2, incluso las lineales si el orden es alto. Nos limitaremos a tratar las lineales de la forma
d
n
y
dx
n
+p
1
(x)
d
n1
y
dx
n1
+ +p
n1
(x)
dy
dx
+p
n
(x)y = r(x).
La teora matem atica asociada a esta ecuaci on es totalmente an aloga a la de las ecuaciones
de segundo orden.
Teorema 6.4.1 Si p
i
, r C
0
[a, b],i = 1, 2, n, x
0
[a, b], y
0
, y
0
, y
n1
R n umeros
cualesquiera, entonces el problema de valor inicial
d
n
y
dx
n
+p
1
(x)
d
n1
y
dx
n1
+ +p
n1
(x)
dy
dx
+p
n
(x)y = r(x).
y(x
0
) = y
0
y
(x
0
) = y
0
.
.
.
y
(n1)
(x
0
) = y
n1
,
6.4. ECUACI
ON LINEAL DE ORDEN N (N > 2) 93
0 2 4 6 8 10 12 14 16 18 20
6
4
2
0
2
4
6
x(t)
y(t)
0 2 4 6 8 10 12 14 16 18 20
6
4
2
0
2
4
6
8
10
x(t)
y(t)
Figura 6.12: Sistema masa-resorte acoplado
tiene una y s olo una soluci on en [a, b].
6.4.1. Soluci on general de la ecuaci on homogenea
Proposici on 6.4.2 Si y
i
(x), i = 1, 2, , n son soluciones de la ecuaci on homogenea
y
(n)
(x) +p
1
(x)y
(n1)
(x) + +p
n1
(x)y
(x) +p
n
(x)y(x) = 0
entonces
n
i=1
i
y
i
(x)
tambien lo es cualesquiera que sean
i
R.
En realidad
i
y
i
(x) es la soluci on general si las y
i
(x) son linealmente independientes,
lo cual se comprueba f acilmente haciendo uso del wronskiano.
Denici on 6.4.1 (wronskiano) Dadas n funciones f
i
, denidas en un intervalo [a, b],
se dene el wronskiano de dichas funciones en el punto x
0
[a, b] como
W (f
1
(x
0
), f
2
(x
0
), f
n
(x
0
)) =
f
1
(x
0
) f
2
(x
0
) f
n
(x
0
)
f
1
(x
0
) f
2
(x
0
) f
n
(x
0
)
.
.
.
.
.
.
.
.
.
.
.
.
f
(n)
1
(x
0
) f
(n)
2
(x
0
) f
(n)
n
(x
0
)
.
94 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
Proposici on 6.4.3 Si p
i
, r C
0
[a, b] y si y
i
(x) son soluciones de la ecuaci on homogenea
en un intervalo [a, b] y existe al menos un punto x
0
[a, b], en el cual
W (y
1
(x
0
), y
2
(x
0
), y
n
(x
0
)) = 0, entonces toda soluci on de la ecuaci on homogenea puede
ponerse en la forma
y(x) =
n
i=1
i
y
i
(x).
Reducci on del orden
Para calcular la soluci on general de la ecuaci on homogenea es preciso conocer n solu-
ciones linealmente independientes. No obstante, conocida una soluci on y
1
(x), al imponer
que y(x) = v(x)y
1
(x) sea soluci on de la ecuaci on diferencial se obtiene una ecuaci on lineal
de orden n 1 en v
que, si es posible resolverla, permitira encontrar la soluci on general
de la ecuaci on de partida. Evidentemente, en general, no es un metodo operativo.
Ecuaci on lineal homogenea con coecientes constantes
Para encontrar n soluciones linealmente independientes de la ecuaci on diferencial
a
0
y
(n)
(x) +a
1
y
(n1)
(x) + +a
n1
y
(x) +a
n
y(x) = 0,
donde a
i
R y a
0
= 0 buscamos soluciones de la forma y = e
rx
, lo que d a lugar a la
ecuaci on caracterstica
a
0
r
n
+a
1
r
n1
+ +a
n1
r +a
n
= 0.
1. r
j
es una raz real simple. La parte de la soluci on general, correspondiente a esta
raz, es
y
j
=
j
e
r
j
x
.
2. r
j
es una raz real de orden k. La parte de la soluci on general, correspondiente a
esta raz, es
y =
k1
i=0
i
x
i
e
r
j
x
.
3. r
j
= a + bi, r
j+1
= a bi son races complejas de orden multiplicidad k. La parte
de la soluci on general, correspondiente a estas races, es
y =
k1
i=0
x
i
e
ax
(
i
cos bx +
i
sen bx) .
6.4. ECUACI
ON LINEAL DE ORDEN N (N > 2) 95
6.4.2. Ecuaci on no homogenea
La soluci on general de la ecuaci on no homogenea es una combinaci on lineal de n solu-
ciones linealmente independientes de la ecuaci on homogenea m as una soluci on particular
cualquiera de la no homogenea.
Metodo de coecientes indeterminados
Si la ecuaci on es de coecientes constantes y el termino no homogeneo es una funci on
exponencial, un polinomio, una funci on senoidal o un producto de varias de ellas, entonces
se pueden buscar soluciones particulares de determinada forma. Nos remitimos a la tabla
que ya se ha expuesto al tratar la secci on de ecuaciones de segundo orden. En este caso
no haremos ninguna restricci on sobre el exponente s.
Metodo de variaci on de parametros
El metodo de variaci on de par ametros, para determinar una soluci on particular de la
ecuaci on lineal no homogenea, es una extensi on directa de la teora para ecuaciones de
segundo orden.
Es necesario conocer n soluciones linealmente independientes de la ecuaci on homogenea,
y
1
, y
2
,....,y
n
, lo que puede resultar complicado si la ecuaci on es de coecientes variables.
Se propone como soluci on particular
y
p
(x) = u
1
(x)y
1
(x) +u
2
(x)y
2
(x) + +u
n
(x)y
n
(x),
imponiendo condiciones sobre las funciones u
i
. Estas condiciones, junto con el hecho que
y
p
(x) sea soluci on particular da lugar a
y
1
u
1
+y
2
u
2
+ +y
n
u
n
= 0
y
1
u
1
+y
2
u
2
+ +y
n
u
n
= 0
y
(n2)
1
u
1
+y
(n2)
2
u
2
+ +y
(n2)
n
u
n
= 0
y
(n1)
1
u
1
+y
(n1)
2
u
2
+ +y
(n1)
n
u
n
= r(x).
Sistema compatible determinado, puesto que el determinante es el wronskiano de las
n soluciones linealmente independientes de la ecuaci on homogenea, y por tanto no nulo.
Se calculan las u
i
, i = 1, 2, , n y, por integraci on las u
i
.
96 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
6.5. Ecuaciones de Euler-Cauchy
Un caso particular de ecuaciones lineales de orden n son las denominadas ecuaciones
de Euler-Cauchy, que presentan la forma
a
0
x
n
y
(n)
(x) +a
1
x
n1
y
(n1)
(x) + +a
n1
xy
(x) +a
n
y(x) = 0.
Para resolver esta ecuaci on se puede hacer lo siguiente: para x > 0 el cambio de variable
independiente x = e
t
, y para x < 0 el cambio x = e
t
da lugar a una ecuaci on con
coecientes constantes, a la que podemos aplicar los metodos ya descritos. O tambien,
proponer soluciones de la forma x
r
si x > 0 o (x)
r
si x < 0. En este caso se obtiene
una ecuaci on algebraica en r de grado n, que coincide con la ecuaci on caracterstica
correspondiente a la ecuaci on de coecientes constantes de variable independiente t, que
tendr a n races r
i
. Por cualquiera de los dos caminos, para x = 0, los casos posibles son
1. r
j
es una raz real simple. La parte de la soluci on general, correspondiente a esta
raz, es
y
j
=
j
|x|
r
j
.
2. r
j
es una raz real de orden k. La parte de la soluci on general, correspondiente a
esta raz, es
y =
k1
i=0
i
|x|
r
j
(log |x|)
i
.
3. r
j
= a + bi, r
j+1
= a bi son races complejas de orden multiplicidad k. La parte
de la soluci on general, correspondiente a estas races, es
y =
k1
i=0
(log |x|)
i
|x|
a
(
i
cos(b log |x|) +
i
sen(b log |x|) .
6.6. Ejercicios
1. Calcular la soluci on general de la ecuaci on y
+y = 0 y la que satisface las condiciones
iniciales y(0) = 1, y
(0) = 17.
2. Encontrar la soluci on general de las siguientes ecuaciones diferenciales, comprobando
que, efectivamente, satisfacen la correspondiente ecuaci on
a) y
+ 3y
4y = 2 sen x.
b) y
3y
4y = 4x
2
.
c) y
3y
4y = e
x
.
d) y
+ 4y = xe
x
+xsen 2x.
6.6. EJERCICIOS 97
e) y
3y
+ 2y = 14 sen 2x 18 cos 2x.
3. Encontrar la soluci on general de las siguientes ecuaciones diferenciales, comprobando
que, efectivamente, satisfacen la correspondiente ecuaci on
a) xy
(1 +x)y
+y = x
2
e
x
, x > 0.
b) (1 x)y
+xy
y = (1 x)
2
.
4. Resolver y
+ 4y
= sen x cos x.
[Resp.: y =
_
c
1
+
1
128
[sen 2x cos 4x 4x]
_
sen 2x +
_
c
2
1
16
sen
4
x
_
cos 2x].
5. Resolver y
+y = cosec x.
[Resp.: y = ln(cosec x + cotg x) ln(sen x) cos x xsen x].
6. Resolver y
iv
+y = 0.
[Resp.: y = e
2
2
x
(c
1
cos x +c
2
sen x) +e
2
2
x
(c
3
cos x +c
4
sen x)].
7. Resolver y
= xe
x
.
[Resp.: y = c
1
e
x
+c
2
e
x
+c
3
+
1
4
(x
2
3x)e
x
].
8. Encontrar la soluci on general de la ecuaci on de Euler-Cauchy
x
3
y
3x
2
y
+ 6xy
6y =
1
x
, x > 0,
sabiendo que {x, x
2
, x
3
} es un conjunto fundamental de soluciones de la ecuaci on
homogenea correspondiente.
[Resp.: y = c
1
x +c
2
x
2
+c
3
x
3
1
24x
].
9. Encontrar una soluci on particular de y
3y
+ 4y = xe
2x
cos x.
[Resp.: y =
7
50
cos x +
1
50
sen x +
1
18
(x
3
x
2
)e
2x
].
10. Resolver el siguiente problema de valor inicial
y
+ 2y
9y
18y = 18x
2
18x + 22,
y(0) = 2,
y
(0) = 8,
y
(0) = 12.
98 CAP
ITULO 6. ECUACIONES DIFERENCIALES LINEALES DE ORDEN N
[Resp.: y = 2e
3x
+e
2x
+x
2
1].
11. Resolver la ecuaci on diferencial y
2y
+ 2y = e
x
tg x.
[Resp.: y =
_
c
1
+
1
2
ln
1 + sen x
1 sen x
_
e
x
cos x +c
2
e
x
sen x.
12. Una ecuaci on lineal de segundo orden a
0
(x)y
+a
1
(x)y
+a
2
(x)y = q(x) se dice que
es exacta si se puede expresar como
d
dx
_
M(x)
dy
dx
+N(x)y
_
= q(x)
a) Probar que una condici on necesaria para que sea exacta es
d
2
a
0
(x)
dx
2
da
1
(x)
dx
+a
2
(x) 0
Es suciente dicha condici on?
b) Suponiendo que se cumple tal condici on determinar M(x) y N(x).
c) Comprobar que la siguiente ecuaci on es exacta e integrarla
(x
2
2x)y
+ 4(x 1)y
+ 2y = e
2x
.
13. Una ma nana amaneci o nevando y sigui o todo el da con la misma intensidad. Una
m aquina quitanieves inici o sus labores de despejar una carretera a las 9 horas,
durante 2 horas pudo limpiar 2 Km., y en las 2 horas siguientes 1 Km. m as. A
que hora empez o a nevar?.Cual es el nombre del maquinista?. [Resp.: aprox. 7.45
h.]
14. a) Demostrar que la ecuaci on con coecientes variables
a
0
x
3
y
+a
1
x
2
y
+a
2
xy
+a
3
y = 0, a
0
, a
1
, a
2
, a
3
R,
se transforma en una con coecientes constantes al hacer el cambio de variable
independiente
x = e
t
, si x > 0,
x = e
t
, si x < 0.
b) Resolver el problema de valor inicial
x
3
y
+x
2
y
2 xy
+ 2 y = 0,
y(1) = 1,
y
(1) = 2,
y
(1) = 0,
indicando el m aximo intervalo en el que queda denida la soluci on.
[Resp.: y = x +
1
x
x
2
; (0, )]
Captulo 7
Soluciones en serie de ecuaciones
lineales
7.1. Motivaci on
Hay muchas ocasiones en que ecuaciones diferenciales lineales, aparentemente sencillas,
no pueden ser resueltas en terminos de funciones elementales. De hecho, no se conoce
ning un tipo de ecuaci on lineal de segundo orden, salvo las de coecientes constantes y las
reducibles a ellas, mediante un cambio de variable independiente, que pueda ser resuelto
mediante funciones elementales.
Los astrofsicos y astr onomos utilizan la ecuaci on
xy
(x) + 2y
(x) + xy(x) = 0,
conocida como ecuaci on de Lane-Emden de ndice n, para aproximar la densidad y tem-
peraturas internas de ciertas estrellas y nebulosas. Un problema que se le plante o, en la
decada de 1900, al astrofsico alem an Robert Emden, consista en
Determinar el primer punto sobre el eje positivo x donde la soluci on del problema de
valor inicial
xy
+ 2y
+ xy = 0
y(0) = 0
y
(0) = 1,
es cero.
La ecuaci on tiene apariencia inofensiva, lineal homogenea de segundo orden, aunque
tiene coecientes variables. Pero lo realmente problem atico es que las condiciones iniciales
est an situadas en el punto x = 0, donde la funci on p(x) = 2/x tiene una singularidad,
por lo que no se le pueden aplicar los resultados de existencia y unicidad. A pesar de
todo, la situaci on fsica modelada sugiere que el problema tiene soluci on y que debe ser
manejable. Supongamos, entonces, que existe una soluci on analtica (desarrollable en
99
100 CAP
ITULO 7. SOLUCIONES EN SERIE DE ECUACIONES LINEALES
serie de potencias)
y =
n=0
a
n
x
n
,
derivando formalmente se obtiene
y
n=1
na
n
x
n1
, y
n=2
n(n 1)a
n
x
n2
,
y sustituyendo en la ecuaci on
2a
1
+ (6a
2
+ a
0
)x +
n=2
[a
n+1
(n + 1)(n + 2) + a
n1
] x
n
= 0.
Esto da lugar a una soluci on, del problema de valor inicial, en forma de serie de potencias
y(x) =
n=0
(1)
n
1
(2n + 1)!
x
2n
.
Esta serie de potencias es absolutamente convergente, en todo R, y por tanto, realmente,
es cierto que su serie derivada converge a y
, y su segunda derivada lo hace a y
.
En este caso se da la circunstancia que la serie obtenida es la serie de Taylor de la
funci on
f(x) =
sen x
x
,
y por tanto el primer punto positivo en el que se anula es x = . Ver Figura 7.1.
En cualquier caso, y aunque la serie obtenida no sea el desarrollo de Taylor de ninguna
funci on conocida, es indudable el interes del metodo ya que permite conocer el compor-
tamiento de la soluci on en un entorno del punto donde est a situada la condici on inicial,
con la precisi on que se desee.
Si recticamos la ecuaci on anterior, por ejemplo
xy
+ y
+xy = 0,
con las mismas condiciones iniciales anteriores, se obtiene la serie soluci on
y(x) =
n=0
(1)
n
1
(2
2
4
2
(2n)
2
)
x
2n
.
En la Figura 7.2 se representan los polinomios de ordenes 2,4,6 y 8.
7.1. MOTIVACI
ON 101
10 8 6 4 2 0 2 4 6 8 10
2
1.5
1
0.5
0
0.5
1
1.5
2
Figura 7.1: Representaci on gr aca de y(x) =
sen x
x
10 8 6 4 2 0 2 4 6 8 10
2
1.5
1
0.5
0
0.5
1
1.5
2
P2
P4
P6
P8
Figura 7.2: Polinomios P
2
(x), P
4
(x), P
6
(x) y P
8
(x)
102 CAP
ITULO 7. SOLUCIONES EN SERIE DE ECUACIONES LINEALES
7.2. Ecuaci on lineal de segundo orden. Puntos ordi-
narios
Vamos a limitar nuestra atenci on a las ecuaciones lineales de segundo orden, que es
el tipo de algunas ecuaciones cl asicas, que se resuelven mediante funciones especiales.
Casos muy conocidos son los siguientes:
1. Ecuaci on de Airy. y
= xy. Se presenta en Aerodin amica.
2. Ecuaci on de Legendre de orden p. (1 x
2
)y
2xy
+ p(p + 1)y = 0, p R.
Tiene un importante papel en Fsica-Matem atica. Por ejemplo, aparece al resolver
problemas de potencial en coordenadas esfericas.
3. Ecuaci on de Hermite. y
2xy
+ y = 0 R.
Aparece en muchas ramas de la Fsica-Matem atica, por ejemplo en Mec anica Cu anti-
ca surge en la investigaci on de la ecuaci on de Schr odinger para un oscilador arm oni-
co.
4. Ecuaci on de Euler. x
2
y
+ xy
+ y = 0, , R.
5. Ecuaci on de Bessel de orden p. x
2
y
+ xy
+ (x
2
p
2
)y = 0, p R.
Consideremos, pues, la ecuaci on lineal homogenea de segundo orden
y
+ p(x)y
+ q(x)y = 0.
Hemos visto que esta ecuaci on es posible resolverla en terminos de funciones elementales
muy ocasionalmente, por ejemplo cuando p(x) y q(x) son constantes y muy pocos casos
m as.
Al margen que una determinada ecuaci on pueda resolverse o no, mediante funciones
elementales, el comportamiento de una soluci on en un entorno de un punto x
0
depende
de manera directa del comportamiento de p(x) y q(x) en dicho entorno.
Denici on 7.2.1 (Punto ordinario y punto singular) Dada la ecuaci on anterior, un
punto x
0
se dice ordinario si p(x) y q(x) son analticas en dicho punto, es decir si son
desarrollables en serie de potencias
p(x) =
n=0
p
n
(x x
0
)
n
, q(x) =
n=0
q
n
(x x
0
)
n
en un entorno (x
0
R, x
0
+ R), R > 0. En otro caso el punto se dice singular
Por ejemplo, si la ecuaci on viene dada en la forma P(x)y
+Q(x)y
+R(x)y = 0, donde
P(x), Q(x) y R(x) son funciones polin omicas, x
0
ser a punto ordinario si P(x
0
) = 0, y
ser a singular si P(x
0
) = 0
7.3. PUNTOS SINGULARES REGULARES. M
ETODO DE FROBENIUS 103
Teorema 7.2.1 Si x
0
es un punto ordinario de la ecuaci on diferencial
y
+ p(x)y
+ q(x)y = 0,
existen dos soluciones analticas linealmente independientes de la forma
y(x) =
n=0
a
n
(x x
0
)
n
.
Adem as, si las series de potencias de p(x) y q(x) son convergentes en el intervalo
(x
0
R, x
0
+R), la serie soluci on tambien lo ser a en dicho intervalo. Dicho de otra for-
ma, el radio de convergencia de cualquier soluci on en serie de potencias, es por lo menos
igual a la distancia de x
0
al punto singular (real o complejo) m as pr oximo de la ecuaci on
diferencial.
Ejemplo 7.2.1 Comprobar que dos soluciones linealmente independientes de la ecuaci on
de Airy, y
= xy, convergentes x R son
y
1
(x) = 1 +
n
n=1
x
3n
(3n)(3n 1)(3n 3)(3n 4) 3 2
,
y
2
(x) = x +
n
n=1
x
3n+1
(3n + 1)(3n)(3n 2)(3n 3) 4 3
.
Por tanto la soluci on general de la ecuaci on de Airy es
y(x) = y
1
(x) + y
2
(x)
y, si las condiciones iniciales son y(0) = y
0
, y
(x
0
) = y
0
, la soluci on del problema de valor
inicial ser a y(x) = y
0
y
1
(x) + y
0
y
2
(x)
Ejemplo 7.2.2 Dos soluciones linealmente independientes de la ecuaci on de Airy,
y
= xy, en serie de potencias de (x 1), convergentes x R son
y
1
(x) = 1 +
(x 1)
2
2
+
(x 1)
3
6
+
(x 1)
4
24
+ ,
y
2
(x) = (x 1) +
(x 1)
3
6
+
(x 1)
4
12
+
7.3. Puntos singulares regulares. Metodo de Frobe-
nius
Denici on 7.3.1 (Punto singular regular) Si x
0
es un punto singular de la ecuaci on
diferencial y
+p(x)y
+q(x)y = 0, se dice singular regular si (xx
0
)p(x) y (xx
0
)
2
q(x)
son analticas en x
0
. En otro caso se dice singular irregular.
104 CAP
ITULO 7. SOLUCIONES EN SERIE DE ECUACIONES LINEALES
La ecuaci on de Euler-Cauchy, ya vista, es un ejemplo de ecuaci on con x = 0 punto
singular regular, y hemos demostrado que tena una soluci on de la forma |x|
r
para x = 0.
Se trata de generalizar la teora de las ecuaciones de Euler-Cauchy para obtener soluciones
en un entorno de un punto singular regular.
Supongamos, por comodidad, x = 0 punto singular regular de la ecuaci on diferencial
y
+ p(x)y
+ q(x)y = 0 y
xp(x) =
0
p
n
x
n
, x
2
q(x) =
0
q
n
x
n
.
Podemos reescribir la ecuaci on en la forma
x
2
y
+ x[xp(x)] y
+
_
x
2
p(x)
y = 0 x
2
y
+ x
_
p
n
x
n
_
y
+
_
q
n
x
n
_
y = 0,
que se reducira a una ecuaci on de Euler-Cauchy en el caso p
n
= q
n
= 0, n 1. Es decir,
la ecuaci on m as general de segundo orden con punto singular regular en el origen, es una
ecuaci on de Euler-Cauchy x
2
y
+xy
+y = 0, donde se han permutado las constantes
y por series de potencias
p
n
x
n
y
q
n
x
n
. Por tanto, cabe esperar soluciones de la
forma y = x
r
a
n
x
n
en lugar de x
r
.
Vamos a determinar:
1. Valores de r para los cuales la ecuaci on diferencial tiene una soluci on de la forma
y(x) = x
r
a
n
x
n
.
2. Una relaci on recurrente de a
n
.
3. Intervalo de convergencia de
a
n
x
n
.
La teora general se debe al matem atico alem an Georg Frobenius (1848-1917), las series
x
r
a
n
x
n
llevan su nombre e incluyen, como caso particular, a las series de potencias
cuando r es nulo o un n umero natural.
Ejemplo 7.3.1 Encontrar soluciones en forma de serie de Frobenius, en un entorno del
origen, de la ecuaci on
2x
2
y
xy
+ (1 + x)y = 0.
Se ensayan soluciones de la forma
y(x) = x
r
n=0
a
n
x
n
=
n=0
a
n
x
n+r
,
con x > 0 (x
r
debe estar denida r), lo que da lugar a la condici on
a
0
[2r(r 1) r + 1] x
r
+
n=1
[a
n
(2(r + n)(r + n 1) (r + n) + 1) + a
n1
] x
r+n
= 0,
7.3. PUNTOS SINGULARES REGULARES. M
ETODO DE FROBENIUS 105
o equivalentemente,
a
0
F(r)x
r
+
n=1
[a
n
F(r + n) + a
n1
] x
r+n
= 0.
Por tanto, si a
0
= 0, se tiene
F(r) = 2r(r 1) r + 1 = 0,
que recibe el nombre de ecuaci on indicial, y
F(r +n)a
n
+ a
n1
= 0 [2(r + n)(r + n 1) (r + n) + 1] a
n
+ a
n1
= 0, n 1.
Las races de la ecuaci on indicial, r
1
= 1, r
2
= 1/2, se denominan exponentes de
singularidad. En este caso, al ser F(r +n) = 0, en ambos casos, se obtienen dos soluciones
para x > 0
y
1
(x) = x
_
1 +
n=1
(1)
n
x
n
(2n + 1)n (2n 1)(n 1) (5 2)(3 1)
_
y
2
(x) = x
1/2
_
1 +
n=1
(1)
n
x
n
(2n 1)n (2n 3)(n 1) (3 2)(1 1)
_
Las dos series de potencias asociadas a estas soluciones son convergentes en todo R.
Para calcular las soluciones en el caso x < 0 hacemos el cambio de variable x = t, lo
que da lugar a la ecuaci on
2t
2
d
2
y
dt
2
t
dy
dt
+ (1 t)y = 0
que debemos estudiar para t > 0. Dado que es el mismo caso anterior, buscamos soluciones
de la forma
y(t) = t
r
n=0
a
n
t
n
=
n=0
a
n
t
n+r
,
obteniendo
y
1
(t) = t
_
1 +
n=1
t
n
(2n + 1)n (2n 1)(n 1) (5 2)(3 1)
_
y
2
(t) = t
1/2
_
1 +
n=1
t
n
(2n 1)n (2n 3)(n 1) (3 2)(1 1)
_
.
Por tanto, para x < 0, como t = x, se obtiene
y
1
(x) = x
_
1 +
n=1
(1)
n
x
n
(2n + 1)n (2n 1)(n 1) (5 2)(3 1)
_
y
2
(x) = (x)
1/2
_
1 +
n=1
(1)
n
x
n
(2n 1)n (2n 3)(n 1) (3 2)(1 1)
_
.
106 CAP
ITULO 7. SOLUCIONES EN SERIE DE ECUACIONES LINEALES
Finalmente, para x = 0, podemos expresar las soluciones en la forma
y
1
(x) = |x|
_
1 +
n=1
(1)
n
x
n
(2n + 1)n (2n 1)(n 1) (5 2)(3 1)
_
y
2
(x) = |x|
1/2
_
1 +
n=1
(1)
n
x
n
(2n 1)n (2n 3)(n 1) (3 2)(1 1)
_
.
Ejemplo 7.3.2 Encontrar soluciones en forma de serie de Frobenius, en un entorno del
origen, de la ecuaci on
x
2
y
xy
+
_
x
2
+
5
4
_
y = 0, x > 0.
Al proceder como en el ejemplo anterior se obtienen las races de la ecuaci on indicial,
F(r) = r(r 1) r 1 = 0, r
1
= 5/2 y r
2
= 1/2.
Se calcula la soluci on correspondiente a la raz mayor, y se obtiene
y
1
(x) = x
5/2
_
1 +
n=1
x
2n
(2 4 2n)(5 7 (2n + 3))
_
.
Sin embargo, para calcular la soluci on correspondiente a la otra raz, se obtiene la identidad
a
0
F(1/2)x
1/2
+a
1
F(1/2)x
1/2
+ [a
2
F(3/2) a
0
] x
3/2
+
+[a
3
F(5/2) a
1
] x
5/2
+
n=4
[a
n
F(n 1/2) a
n1
] x
n1/2
= 0.
Como F(1/2) = 0, a
0
puede ser arbitrario, por ejemplo a
0
= . F(1/2) = 0 = a
1
=
0. F(3/2) = 0 = a
2
= a
0
/F(3/2) = /F(3/2). Al ser F(5/2) = 0 no es posible despejar
a
3
. Sin embargo, en este caso, al ser a
1
= 0, a
3
F(5/2) a
1
= 0 cualquiera que sea a
3
=
(en otro caso, si fuera a
1
= 0, no existira una soluci on en forma de serie de Frobenius,
correspondiente a esta raz). Al considerar la recurrencia
a
n
=
a
n1
F
_
n
1
2
_, n 4,
se obtienen dos series, una en funci on de a
0
= y la otra en funci on de a
3
= , dando
lugar a la soluci on general
y(x) = x
1/2
_
1
x
2
2
x
4
2 4
+
_
+x
1/2
_
x
3
+
x
5
2 5
+
x
7
(2 4)(5 7)
+
_
+ x
1/2
_
1
x
2
2
x
4
2 4
+
_
+x
5/2
_
1 +
x
2
2 5
+
x
4
(2 4)(5 7)
+
_
7.3. PUNTOS SINGULARES REGULARES. M
ETODO DE FROBENIUS 107
Es decir, al calcular la soluci on correspondiente a la raz m as peque na, en este caso (dife-
rencia de las dos races es un n umero natural) se obtienen las dos soluciones linealmente
independientes (tambien la correspondiente a la raz mayor). Pero esto no siempre es as,
porque hay casos de imposibilidad de cumplir la identidad anterior.
.
Teorema 7.3.1 Sea x = x
0
punto singular regular de la ecuaci on diferencial
y
+ p(x)y
+ q(x)y = 0.
(x x
0
)p(x), (x x
0
)
2
q(x) analticas en (x
0
R, x
0
+R), con R > 0, r
1
y r
2
races de la
ecuaci on indicial (F(r) = r(r 1) +p
0
r +q
0
= 0), con Re(r
1
) Re(r
2
),
1. Si r
1
r
2
= N N, entonces la ecuaci on diferencial tiene dos soluciones linealmente
independientes, no triviales, de la forma
y
1
(x) = |x x
0
|
r
1
n=0
a
n
(x x
0
)
n
, a
0
= 0
y
2
(x) = |x x
0
|
r
2
n=0
a
n
(x x
0
)
n
, a
0
= 0.
2. Si r
1
r
2
= N N, la ecuaci on diferencial tiene dos soluciones linealmente inde-
pendientes, no triviales, dadas, respectivamente, por
y
1
(x) = |x x
0
|
r
1
n=0
a
n
(x x
0
)
n
, a
0
= 0
y
2
(x) = |x x
0
|
r
2
n=0
a
n
(x x
0
)
n
+ Cy
1
(x) log |x x
0
|,
donde a
0
= 0 y C una constante, que puede o no ser 0.
3. Si r
1
= r
2
, entonces la ecuaci on diferencial tiene dos soluciones linealmente inde-
pendientes, no triviales, de la forma
y
1
(x) = |x x
0
|
r
1
n=0
a
n
(x x
0
)
n
, a
0
= 0
y
2
(x) = |x x
0
|
r
1
+1
n=0
a
n
(x x
0
)
n
+ y
1
(x) log |x x
0
|.
Todas estas soluciones son v alidas en el intervalo (x
0
R, x
0
+ R).
108 CAP
ITULO 7. SOLUCIONES EN SERIE DE ECUACIONES LINEALES
7.4. Ejercicios
1. Determinar la soluci on en serie de potencias del problema de valor inicial,
(x
2
1)y
+ 3xy
+ xy = 0
y(0) = 4
y
(0) = 6.
2. Resolver la ecuaci on de Legendre de orden p, en un entorno del origen.
(1 x
2
)y
2xy
+ p(p + 1)y = 0, p R.
Comprobar que en el caso p N, una de las dos series soluci on es un polinomio,
obteniendose as los llamados polinomios de Legendre P
p
(x):
P
0
(x) = 1, P
1
(x) = x, P
2
(x) = 13x
2
, P
3
(x) = x
5
3
x
3
, P
4
(x) = 110x
2
+
35
3
x
4
,
3. Resolver la ecuaci on diferencial
y
(x) xy
(x) y(x) = sen x,
mediante un desarrollo en serie de potencias de x. Considerar el desarrollo en serie
del seno.
4. Comprobar que la soluci on general de la ecuaci on de Hermite
y
2xy
+ y = 0, < x < , R,
es de la forma y(x) = c
1
y
1
(x) + c
2
y
2
(x), donde
y
1
(x) = 1
2!
x
2
(4 )
4!
x
4
(8 )(4 )
6!
x
6
+
y
2
(x) = x +
2
3!
x
3
+
(6 )(2 )
5!
x
5
+
(10 )(6 )(2 )
7!
x
7
+ .
Para = 0, 2, 4, 6, 8, se obtienen polinomios que, normalizados, reciben el nom-
bre de polinomios de Hermite.
5. La ecuaci on de Bessel de orden 1/2 es
x
2
y
+ xy
+
_
x
2
1
4
_
= 0.
Comprobar que, aunque las races de la ecuaci on indicial son tales que r
1
r
2
= 1,
tiene dos soluciones linealmente independientes en forma de series de Frobenius en
un entorno del origen. Encontrar tales soluciones.
7.4. EJERCICIOS 109
6. Encontrar una soluci on en serie de potencias en un entorno del punto singular regular
x = 0 de la ecuaci on
xy
+ 3y
xy = 0.
7. Encontrar al menos los primeros cuatro terminos no nulos, del desarrollo en serie de
potencias en un entorno de x = , de la soluci on del problema de valor inicial
y
(sen x)y = 0
y() = 1
y
() = 0.
8. Estudiar el comportamiento de la soluci on general de la ecuaci on diferencial
4x
3
d
y
dx
2
+ 6x
2
dy
dx
+ y = 0,
para valores grandes de x. (Considerar el cambio de variable x = 1/t)
9. Consideremos la ecuaci on diferencial
xy
+ (1 x)y
+y = 0
a) Encontrar y clasicar sus puntos singulares. Mostrar que x
0
= 0 es punto
singular regular.
b) Cuales son las races de la ecuaci on indicial ?.
c) Encontrar una soluci on en forma de serie de Frobenius.
d) Comprobar que si N la soluci on anterior se reduce a un polinomio, y
encontrarla en el caso = 3.
e) Cual es la forma de la segunda soluci on linealmente independiente con la ob-
tenida.
10. Consideremos la ecuaci on diferencial de segundo orden
(1 x
2
)y
2xy
+ 2y = 0
a) Teniendo en cuenta que una de sus soluciones es una funci on polin omica de
primer grado, encontrar la soluci on general, as como la que satisface las con-
diciones iniciales
y(0) = 1, y
(0) = 0.
Representar gr acamente esta ultima, e indicar su intervalo de validez.
b) Describir detalladamente el procedimiento necesario, sin resolver la ecuaci on,
para averiguar el comportamiento de las soluciones en un entorno del punto
x = 1. Que se podra decir sobre la soluci on que cumple y(1) = y
(1) = 3?.
110 CAP
ITULO 7. SOLUCIONES EN SERIE DE ECUACIONES LINEALES
11. Se considera la ecuaci on diferencial de segundo orden:
1
sen
d
d
(sen
dy
d
) + n(n + 1)y = 0
a) Comprobar que mediante el cambio de variable x = cos esta ecuaci on se
transforma en la ecuaci on diferencial de Legendre:
(1 x
2
)
d
2
y
dx
2
2x
dy
dx
+n(n + 1)y = 0
b) Integrar mediante desarrollo en serie dicha ecuaci on en un entorno de x = 0.
12. Se considera la e.d.o.:
(I) y
(x) + (p +
1
2
1
4
x
2
)y = 0 p R
a) Posee puntos singulares dicha ecuaci on?. Justicar la respuesta.
b) Se desea obtener la soluci on de dicha ecuaci on en un entorno del origen median-
te desarrollo en serie. Comprobar que no es posible obtener el termino general
de la serie.
c) Se introduce el cambio de variable y(x) = w(x)e
x
2
4
. Obtener la nueva ecuaci on
diferencial y resolverla mediante desarrollo en serie.
d) Obtener la soluci on de la e.d.o. (I) a partir de la soluci on obtenida en el apar-
tado anterior y determinar el radio de convergencia de la serie obtenida.
Captulo 8
Transformada de Laplace
8.1. Motivaci on
Determinados problemas de valor inicial, por ejemplo cuando en el segundo miembro
de la ecuaci on diferencial hay una funci on discontinua o una funci on tipo impulso, no es
posible resolverlos por los metodos vistos hasta ahora.
El movimiento de una masa de un sistema masa-resorte-amortiguador, que est a en
equilibrio hasta el instante t = , en que se le aplica a la masa una fuerza de impulso
unidad, viene descrito por el problema de valor inicial
y
+ 2y
+ 2y = (t )
y(0) = 0
y
(0) = 0
La funci onf(t) = (t ), que aparece en el segundo miembro, simula el compor-
tamiento de una fuerza que act ua instant aneamente de tal modo que es nula para todo
t = , por ejemplo un martillazo que act ua sobre la masa en el instante t = , (o aplicar
un voltaje que act ua sobre un circuito electrico unicamente en el instante determinado).
Posteriormente, introduciremos las funciones de impulso.
Al aplicar la transformada de Laplace al problema de valor inicial anterior, hemos de
resolver la ecuaci on algebraica
L[y(t)](s
2
+ 2s + 2) = e
s
= L[y(t)] =
e
s
(s + 1)
2
+ 1
,
y, mediante la transformada inversa, se obtiene nalmente
y(t) =
_
0, t <
e
(t)
sen(t ), t .
Esta funci on, tal como puede apreciarse en la Figura 8.1 es continua, pero no es
derivable en el punto t = . Por tanto, no puede ser una soluci on cl asicade un problema
111
112 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
0 1 2 3 4 5 6 7 8 9 10
0.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
Figura 8.1: Soluci on del p.v.i. por Transformada de Laplace
de valor inicial, a menos que en el segundo miembro de la ecuaci on diferencial exista una
funci onque equilibre la situaci on creada.
La idea del metodo de la transformada de Laplace consiste en transformarel pro-
blema de valor inicial (ecuaci on diferencial y condiciones iniciales) en otro de naturaleza
algebraica, resolver una ecuaci on algebraica y aplicar la transformaci on inversa para ob-
tener, nalmente, la soluci on del problema original. Tal situaci on se describe en la Figura
8.2.
Ya hemos explicado anteriormente que no siempre es posible resolver determinados
problemas de valor inicial directamente, sino que es necesario realizar el rodeode la
transformada de Laplace.
8.2. Denici on de la transformada de Laplace
Uno de los conceptos de gran utilidad para resolver ecuaciones diferenciales lineales es
el uso de las transformadas integrales
f(t) F(s) =
_
K(s, t)f(t)dt
donde una funci on dada f(t), se transforma en otra F(s), que se dice transformada de f.
La funci on K(s, t) se dice n ucleo de la transformaci on. Veremos a continuaci on una de
estas transformadas.
8.2. DEFINICI
ON DE LA TRANSFORMADA DE LAPLACE 113
Figura 8.2: Idea del metodo de la Transformada de Laplace
Denici on 8.2.1 (Transformada de Laplace) Dada una funci on f(t) denida t
0, la transformada de Laplace de f es la funci on F(s) denida de la siguiente manera
L[f(t)] = F(s) =
_
0
e
st
f(t)dt,
cuyo dominio consta de todos los valores de s para los cuales la integral impropia es
convergente.
Ejemplo 8.2.1
L[1] =
1
s
, s > 0.
Ejemplo 8.2.2
L[e
at
] =
1
s a
, s > a.
Ejemplo 8.2.3
L[cos at] =
s
s
2
+ a
2
, s > 0.
Ejemplo 8.2.4
L[sen at] =
a
s
2
+ a
2
, s > 0.
114 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
Figura 8.3: Funci on de orden exponencial
Ejemplo 8.2.5
L[t
n
] =
n!
s
n+1
, s > 0.
Denici on 8.2.2 (Orden exponencial) Se dice que una funci on f es de orden expo-
nencial (Ver Figura 8.3), si existen constantes positivas C y t
0
tales que
|f(t)| Ce
t
, t t
0
.
Ejemplo 8.2.6 Las siguientes funciones son de orden exponencial: 1, t, e
at
, sen at, cos at,
t
n
e
at
cos bt. En cambio e
t
2
no es de orden exponencial.
Teorema 8.2.1 Si f es una funci on continua a trozos en [0, ) y de orden exponencial
, |f(t)| Ce
t
, t t
0
, entonces
F(s) =
_
0
e
st
f(t)dt
converge s > .
Corolario 8.2.2 Con las mismas hip otesis del teorema anterior, y t
0
= 0, se tiene
lm
s
F(s) = 0.
8.3. PROPIEDADES DE LA TRANSFORMADA DE LAPLACE 115
8.3. Propiedades de la transformada de Laplace
Sea E el conjunto de todas las funciones continuas a trozos de orden exponencial (espa-
cio vectorial sobre R), y F funciones reales denidas sobre intervalos de la forma (s
0
, )
o [s
0
, ), con s
0
. F puede considerarse espacio vectorial sobre R si convenimos
que aunque f, g F tengan dominios distintos, el dominio de f +g sea la intersecci on de
ambos, es decir f + g se dene en el dominio intersecci on de los de f y g.
Proposici on 8.3.1 (Linealidad de la transformada de Laplace) . Con las precisio-
nes anteriores la transformada de Laplace,
L : E F,
es una aplicaci on lineal.
Proposici on 8.3.2 (Traslaci on)
L[f(t)] = F(s), s > = L[e
at
f(t)] = F(s a), s > + a.
Proposici on 8.3.3
L[f(t)] = F(s), = L[f(ct)] =
1
c
F
_
s
c
_
, si c > 0.
Proposici on 8.3.4 (Transformada de la derivada) Si f es continua en [0, ), f
continua a trozos en [0, ) y ambas de orden exponencial, de modo que existen cons-
tantes C, a y t
0
tales que |f(t)| Ce
at
para todo t t
0
, entonces L[f
(t)] existe para
s > a y
L[f
(t)] = sL[f(t)] f(0).
Proposici on 8.3.5 (Transformada de derivadas de orden mayor que 1) Si
f, f
, , f
(n1)
son continuas en [0, ), y f
(n)
continua a trozos en [0, ) y todas de
orden exponencial, entonces L[f
(n)
(t)] existe para s > a y
L[f
(n)
(t)] = s
n
L[f(t)] s
n1
f(0) s
n2
f
(0) f
(n1)
(0).
Proposici on 8.3.6 (Derivada de la transformada) Si L[f(t)] = F(s), entonces
L[tf(t)] = F
(s) y, en general, L[(t)
n
f(t)] = F
(n)
(s).
Proposici on 8.3.7 (Transformada de la integral) Si f es continua a trozos y de or-
den exponencial en [0, ), y a 0 entonces
L
__
t
a
f(x) dx
_
=
1
s
L[f(t)]
1
s
_
a
0
f(x) dx.
116 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
8.4. Transformada inversa de Laplace
Dado que nuestro objetivo nal es resolver problemas de valor inicial, mediante trans-
formadas de Laplace, un paso fundamental en este proceso es encontrar la transformada
inversa, y para ello lo primero que se necesita es estudiar su unicidad, es decir si la
aplicaci on
L : E F
es inyectiva.
Teorema 8.4.1 (Teorema de Lerch) Si f y g son funciones continuas a trozos, de or-
den exponencial y L[f](s) = L[g](s), s > s
0
, entonces f(t) = g(t), t > 0, con la posible
excepci on de puntos de discontinuidad.
La aplicaci on L : E F, tal como acabamos de ver, es inyectiva. Por tanto, existe
la aplicaci on inversa L
1
: L(E) E.
Proposici on 8.4.2 la aplicaci on
L
1
: L(E) E
es lineal.
Ejercicio 8.4.1 Calcular la transformada inversa de las siguientes funciones
2
s
3
,
7
(s + 3)
5
,
s 1
s
2
2s + 5
,
8s + 1
s
2
3s + 2
,
s
2
+ 1
(s + 1)
2
(s 2)
Ejercicio 8.4.2 Sea F(s) = P(s)/Q(s), donde Q(s) es un polinomio de grado n con n
races distintas r
1
, r
2
, ...r
n
y P(s) un polinomio de grado menor que n.
1. Demostrar que
P(s)
Q(s)
=
A
1
s r
1
+ .... +
A
k
s r
k
+ .... +
A
n
s r
n
= A
k
=
P(r
k
)
Q
(r
k
)
, k = 1, 2...n.
2.
L
1
[F(s)] =
n
k=1
P(r
k
)
Q
(r
k
)
e
r
k
t
.
8.5. FUNCI
ON ESCAL
ON UNIDAD 117
Figura 8.4: Funci on escal on unidad
8.5. Funci on escal on unidad
Algunas de las aplicaciones m as interesantes de metodo de transformada de Laplace,
se presentan, tal como ya se ha dicho, en la soluci on de ecuaciones diferenciales lineales
que tienen funciones discontinuas o funciones de impulso.
Para tratar funciones que tienen discontinuidades nitas es conveniente introducir la
funci on escal on unidad o funci on de Heaviside (Ver Figura 8.4),
u
a
(t) =
_
0, t < a
1, t a
o funciones del tipo
h(t) = u
a
(t) u
b
(t) =
_
_
_
0, t < a
1, a t < b
0, t b
Tambien se utiliza la funci on escal on unidad para trasladar una funci on dada f(t),
denida para t > 0. La funci on u
a
(t)f(t a) representa una traslaci on de la funci on f(t)
seg un el vector (a, 0). Ver Figura 8.5.
Ejercicio 8.5.1 Comprobar que
L[u
a
(t)] =
e
as
s
, s > 0.
118 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
Figura 8.5: Efecto de una funci on escal on sobre una funci on f
Teorema 8.5.1 Si F(s) = L[f(t)] existe para s > a 0 y si c es una constante positiva,
entonces
L[u
c
(t)f(t c)] = e
cs
L[f(t)] = e
cs
F(s), s > a.
Recprocamente,
f(t) = L
1
[F(s)] = u
c
(t)f(t c) = L
1
[e
cs
F(s)].
Ejemplo 8.5.1 Determinar la transformada de Laplace de la funci on
f(t) =
_
sen t, 0 t < 2
sen t + cos t, t 2
La funci on dada se puede poner en la forma f(t) = sen t+u
2
(t) cos(t2). Por tanto,
L[f(t)] = L[sen t] +L[u
2
(t) cos(t 2)] =
1
s
2
+ 1
+ e
2s
s
s
2
+ 1
=
1 + se
2s
s
2
+ 1
.
Tambien podra hacerse aplicando la denici on.
8.6. SOLUCI
ON DE PROBLEMAS DE VALOR INICIAL 119
8.6. Soluci on de problemas de valor inicial
El tipo de problemas de valor inicial en los que est a especialmente indicado el metodo
de transformada de Laplace es, por ejemplo, el siguiente
y
+ 4y = h(t) =
_
1, t < 2
0, en otro caso
y(0) = 1
y
(0) = 0.
Responde a un modelo, por ejemplo, de un sistema masa-resorte-amortiguador al que se
le aplica una fuerza externa h(t), o la carga de un condensador en un circuito electrico
simple con un voltaje aplicado en la forma h(t).
Al aplicar el metodo se obtiene
L[y(t)] =
s
s
2
+ 4
+
e
s
s(s
2
+ 4)
e
2s
s(s
2
+ 4)
.
1
s(s
2
+ 4)
=
1
4
_
1
s
s
s
2
+ 4
_
= L
_
1
4
(1 cos 2t)
_
.
Por tanto,
y(t) = cos 2t +
1
4
u
(t)[1 cos 2(t )]
1
4
u
2
(t)[1 cos 2(t 2)],
o equivalentemente
y(t) =
_
_
_
cos 2t, 0 t <
cos 2t +
1
4
[1 cos(2t 2)] =
3
4
cos 2t +
1
4
, t < 2
3
4
cos 2t +
1
4
1
4
[1 cos(2t 4)] = cos 2t, 2 t < .
En la Figura 8.6 est a representada esta funci on. Puede observarse el efecto de la funci on
h(t) sobre el sistema en el intervalo [, 2].
8.7. Funciones de impulso
Consideremos una fuerza f(t) que act ua solo durante un intervalo de tiempo [a, b]
muy peque no, de modo que f(t) = 0 si t / [a, b]. Un ejemplo de tal situaci on puede ser la
fuerza impulsiva de una raqueta sobre una pelota, dada por el impacto casi instant aneo,
o un r apido aumento de voltaje (por ejemplo una descarga) sobre un circuito electrico.
En tales situaciones el principal efecto de la fuerza se pone de maniesto fundamen-
talmente por el valor de la integral
p =
_
b
a
f(t)dt,
120 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
0 1 2 3 4 5 6 7 8 9 10
2
1.5
1
0.5
0
0.5
1
1.5
2
Figura 8.6: Soluci on del problema de valor inicial
que se dice impulso de la fuerza f(t) sobre el intervalo [a, b]. Vamos a sustituir la fuer-
za desconocida f(t) por otra m as simple que produzca el mismo impulso. Por ejemplo,
supongamos que f(t) produce un impulso unidad y act ua durante un periodo de tiempo
0 a t < a + . La funci on
d
a,
(t) =
_
1/, a t < a +
0, en otro caso,
es una funci on tal que, si b a +, tambien produce un impulso unidad para todo > 0,
p =
_
b
a
d
a,
(t)dt =
_
0
d
a,
(t)dt =
_
a+
a
1
dt = 1.
La formulaci on de un modelo de impulso unitario instant aneo corresponde a tal situa-
ci on cuando 0, con lo cual resultara
(t a) =
a
(t) = lm
0
d
a,
(t), a 0.
Por otra parte, si podemos tomar el lmite dentro del signo integral
_
0
a
(t)dt = 1,
lo cual da lugar a una incoherencia ya que
lm
0
d
a,
(t) =
_
, t = a
0, t = a.
8.7. FUNCIONES DE IMPULSO 121
Figura 8.7: Funci on de impulso unidad
Por tanto, no existe ninguna funci on que cumpla esos requisitos. A este nuevo objeto
matem atico lo llamaremos distribuci on (o funci on generalizada) de Dirac en el punto a.
Queda caracterizada por
a
(t) = 0, t = a,
y adem as
_
0
a
(t)dt = 1.
En el caso a = 0 tendremos la funci on en el origen, (t) =
0
(t).
La funci on no satisface, obviamente, las hip otesis de teorema que garantiza la exis-
tencia de transformadas de Laplace. Sin embargo, puede ser denida la transformada de
Laplace de la funci on de la siguiente manera.
D
a,
(s) = L[d
a,
(t)] =
_
a+
a
e
st
1
dt =
e
as
s
(1 e
s
).
Denimos
L[(t a)] = L[
a
(t)] = lm
0
D
a,
(s) = e
as
.
Para modelizar problemas con impulsos se introduce la funci on , y se trata formal-
mente como si fuera una funci on ordinaria. Sin embargo, debe quedar claro que para
justicar tales procedimientos hay toda una teora matem atica (Teora de Distribuciones)
que, obviamente, no trataremos aqu.
122 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
Con estas consideraciones ya disponemos de las herramientas necesarias para resolver
e interpretar el problema planteado en la Secci on 1 del presente Captulo.
Vamos a retomar en este punto un ejercicio ya considerado en un Captulo anterior,
para formularlo en terminos de funciones de impulso.
Ejercicio 8.7.1 (Plan de pensiones) . Un se nor decide participar en un plan de pen-
siones con una aportaci on inicial de 10000 de euros y dep ositos anuales de 60000. Si le
garantizan un interes del 5 % anual cual es la cantidad que tendra garantizada al cabo
de 20 a nos?.
La formulaci on del problema queda en la forma
dC(t)
dt
= 0,05C(t) +
20
i=1
6000(t i),
C(0) = 10000,
que, al aplicar el metodo de la transformada de Laplace, proporciona la soluci on
C(t) = 10
4
e
0,05t
+ 6000
20
i=1
u
i
(t)e
0,05(ti)
, 0 t 20.
La cantidad garantizada al cabo de 20 a nos ser a
C(20) = 10
6
e + 600,000
e 1
e
0,05
1
= 228.264 euros,
8.8. Transformaci on de funciones peri odicas
.
En muchos sistemas mec anicos o electricos se presentan con mucha frecuencia funciones
peri odicas m as complejas que simples senos o cosenos, por lo que es conveniente analizar
la transformadas de Laplace de tales funciones.
Teorema 8.8.1 Sea f(t) una funci on peri odica, continua a trozos en [0, ), de orden
exponencial y cuyo periodo es p, entonces su transformada de Laplace existe para s > 0 y
es igual a
L[f(t)] =
1
1 e
ps
_
p
0
e
st
f(t) dt.
Ejemplo 8.8.1 Aplicando el resultado anterior comprobar que la transformada de Lapla-
ce de la funci on de onda cuadrada, f(t), de periodo 2a, que se presenta en la Figura 8.8,
es
L[f(t)] =
1
s
tanh
as
2
.
8.8. TRANSFORMACI
ON DE FUNCIONES PERI
ODICAS 123
Figura 8.8: Funci on onda cuadrada
Figura 8.9: Funci on onda triangular
124 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
Ejemplo 8.8.2 Comprobar que la transformada de Laplace de la funci on de onda trian-
gular, g(t), de periodo 2a, de la Figura 8.9, es
L[g(t)] =
1
s
2
tanh
as
2
.
8.9. Convoluci on
La f ormula de convoluci on es la propiedad m as importante de la transformada de
Laplace, y no solamente porque permite deducir la transformada inversa de un producto,
sino porque juega un importante papel en ciertas investigaciones de an alisis avanzado.
Denici on 8.9.1 (Convoluci on) Dadas dos funciones f y g, continuas a trozos en
[0, t), t 0, se dene convoluci on de f y g mediante
(f g)(t) =
_
t
0
f()g(t ) d, t 0.
Teorema 8.9.1 (Teorema de convoluci on) Sean f y g, dos funciones continuas a tro-
zos en [0, ), de orden exponencial, tales que sus respectivas transformadas sean F(s) y
G(s). Entonces
L[(f g)(t)] = F(s) G(s) L
1
[F(s) G(s)] = (f g)(t).
Ejemplo 8.9.1
L
1
_
1
s(s
2
+ 1)
_
= L
1
_
1
s
_
L
1
_
1
s
2
+ 1
_
= 1 sen t = cos t + 1.
8.9.1. Principio de Duhamel
Consideremos un sistema fsico en el cual tengamos que averiguar la respuesta, y(t),
a diversas funciones de entrada f(t), mediante resoluci on de problemas de valor inicial
ay
+ by
+ cy = f(t)
y(0) = 0
y
(0) = 0.
(8.1)
La transformada de Laplace de la soluci on viene dada por
L[y(t)] =
1
as
2
+ bs + c
L[f(t)] = W(s) F(s),
8.10. TABLA DE TRANSFORMADAS DE LAPLACE 125
donde
W(s) =
1
as
2
+ bs + c
= L[w(t)],
y w(t) es la soluci on unica del problema de valor inicial
aw
+ bw
+ cw = (t)
y(0) = 0
y
(0) = 0.
(8.2)
Por tanto, conocida la soluci on, w(t), de 8.2, es posible calcular la soluci on de 8.1,
para cualquier f(t), mediante
y(t) = w(t) f(t).
Este hecho recibe el nombre de principio de Duhamel.
8.10. Tabla de transformadas de Laplace
f(t) = L
1
(F(s)) F(s) = L(f(t))
1
1
s
, s > 0
t
p
, p > 1
(p+1)
s
p+1
, s > 0
e
at 1
sa
, s > a
sen at
a
s
2
+a
2
, s > 0
cos at
s
s
2
+a
2
, s > 0
senh at
a
s
2
a
2
, s > |a|
cosh at
s
s
2
a
2
, s > |a|
e
at
sen bt
b
(sa)
2
+b
2
, s > a
e
at
cos bt
sa
(sa)
2
+b
2
, s > a
t
n
e
at
, n N
n!
(sa)
n+1
, s > a
u
c
(t)
e
cs
s
, s > 0
u
c
(t)f(t c) e
cs
F(s)
e
ct
f(t) F(s c)
f(ct)
1
c
F
_
s
c
_
, c > 0
_
t
0
f(t )g()d F(s)G(s)
(t c) e
cs
f
(n)
(t) s
n
F(s) s
n1
f(0) s
n2
f
(0) f
(n1)
(0)
(t)
n
f(t) F
(n)
(s)
8.11. Ejercicios
1. Resolver, mediante transformada de Laplace, el p.v.i.
y
+ 2y
+ 2y = 1 u
2
(x), y(0) = 0, y
(0) = 0.
126 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
[Resp.: y(t) =
_
1
2
[1 e
t
(cos t + sen t)], 0 t 2,
1
2
e
t
(cos t + sen t)(1 e
2
), t 2.
]
2. A) Usando la serie de Taylor de sen t
sen t =
n=0
(1)
n
t
2n+1
(2n + 1)!
,
y suponiendo que la transformada de Laplace de esta serie puede calcularse termino
a termino, comprobar que
L[sen t] =
1
s
2
+ 1
, s > 1.
B) Sea
f(t) =
_
sen t
t
, t = 0,
1 t = 0.
Encontrar la serie de Taylor de f en un entorno de t = 0 y, suponiendo que la trans-
formada de Laplace de esta serie puede calcularse termino a termino, comprobar
que
L[f(t)] = arctan
1
s
, s > 1.
3. Consideremos un sistema masa-resorte-amortiguador con m = 1, c = 4 y k = 20 en
unidades apropiadas. Suponer que el sistema est a inicialmente en equilibrio (y(0) =
y
(0) = 0), y que la masa es impulsada por la fuerza externa f(t), funci on de onda
cuadrada con amplitud 20 y periodo 2. Encontrar la funci on y(t) que describe el
movimiento.
4. Sea una masa m sujeta a un resorte, con m = k = 1 e y(0) = y
(0) = 0. En cada uno
de los instantes t = , 2, ....n, ... la masa se golpea con un martillo dando lugar a
un impulso unitario. Determinar el movimiento resultante.
[Resp.: Soluci on en n t < (n + 1) : y(t) =
_
0, n par,
sen t, n impar.
]
5. Una masa m est a sujeta a un resorte, sin amortiguador, y cuya constante es k = 4.
La masa se aparta del reposo con y(0) = 3. En el instante t = 2 la masa es golpeada
con un martillo que le produce un impulso p = 8. Determinar el movimiento de la
masa.
[Resp.: y(t) =
_
3 cos t, 0 t < 2,
3 cos t + 4 sen 2t, t 2.
]
8.11. EJERCICIOS 127
6. Se considera el problema de valor inicial
my
+ ky = f
0
cos x
y(0) = 0
y
(0) = 0
donde m, k, f
0
R
+
y R
.
Sea
0
=
_
k/m. Resolver dicho problema haciendo uso de la transformada de
Laplace. Discutir los casos =
0
y =
0
. Representar gr acamente las soluciones
cuando = 2
0
y cuando =
0
.
[Resp.: y(t) =
_
f
0
2m
0
xsen
0
x, =
0
,
f
0
m(
2
2
0
)
(cos
0
x cos x), =
0
.
]
7. Se considera la funci on g(x) = xsen ax, (a R)
a) Relacionar la transformada de Laplace de g
(x) con la de g(x) y, usando dicha
relaci on, calcular L[g(x)].
b) Se considera el problema de valor inicial
_
y
+
2
y = f(x) N.
y(0) = y
(0) = 0
siendo
f(x) =
_
cos x x [0, 2)
0 x 2
Resolver, utilizando la transformada de Laplace, dicho problema. Suponiendo
que = 3 representar gr acamente la soluci on del PVI en [0,
8
3
].
[Resp.: L(g(x)) =
2as
(s
2
+a
2
)
2
; y(x) =
x
2
sen x u
2
x2
2
sen (x 2).]
8. Se considera el p.v.i.
_
y
+ 2y
+ 2y = f(x)
y(0) = 0, y
(0) = 0
donde
f(x) =
_
1 0 x <
0 x ,
Obtener la soluci on del p.v.i. mediante el metodo de la transformada de Laplace,
haciendo uso del producto de convoluci on en la b usqueda de la transformada inversa.
[Resp.: y(t) =
_
1
2
[1 e
t
(sen t + cos t)], 0 t < ,
1
2
(sen t + cos t)(1 + e
), t .
]
128 CAP
ITULO 8. TRANSFORMADA DE LAPLACE
9. Resolver la siguiente ecuaci on integral, usando la transformada de Laplace
(t) +
_
t
0
(t )()d = sen 2t
[Resp.: (t) =
1
3
(4 sen 2t 2 sen t)].
10. Resolver el problema de valor inicial
y
+ 2y
+ y = 10(t ),
y(0) = 0,
y
(0) = 0,
que modela el movimiento de una masa sujeta a un resorte, que est a en equilibrio
hasta el instante t = , en el que se le aplica una fuerza cuyo impulso vale 10
unidades. Representar gr acamente la soluci on obtenida. Calcular el lmite de la
soluci on, cuando t , e interpretar fsicamente el resultado obtenido.
[Resp.: y(t) =
_
0, 0 t < ,
10 e
(t )e
t
, t .
].
Captulo 9
Sistemas de ecuaciones lineales de
primer orden
9.1. Motivaci on
Los sistemas de ecuaciones diferenciales surgen en problemas que involucran varias va-
riables dependientes, cada una de las cuales es funci on de una sola variable independiente.
Por ejemplo, el sistema masa-resorte acoplado, que hemos comentado al introducir
las ecuaciones lineales de orden superior a dos en un Captulo anterior, tambien puede
describirse en terminos de un sistema lineal de primer orden.
Las posiciones relativas de las dos masas alrededor de la posici on de equilibrio venan
dadas por el sistema
m
1
d
2
x
dt
2
= k
1
x + k
2
(y x)
m
2
d
2
y
dt
2
= k
2
(y x),
que result o ser equivalente a una ecuaci on de cuarto orden, al despejar una de las dos
variables dependientes en una ecuaci on y sustituir en la otra.
Cuando se utilizan como variables de estado (variables dependientes) la posici on y la
velocidad de las dos masas, z
1
(t) = x(t), z
2
(t) = y(t), z
3
(t) = x
(t) y z
4
(t) = y
(t) se
obtiene el sistema lineal de primer orden
z
1
= z
3
z
2
= z
4
z
3
=
k
1
+k
2
m
1
z
1
+
k
2
m
1
z
2
z
4
=
k
2
m
2
z
1
k
2
m
2
z
2
,
129
130 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
que se puede escribir en forma matricial
_
_
_
_
z
1
z
2
z
3
z
4
_
_
_
_
=
_
_
_
_
0 0 1 0
0 0 0 1
k
1
+k
2
m
1
k
2
m
1
0 0
k
2
m
2
k
2
m
2
0 0
_
_
_
_
_
_
_
_
z
1
z
2
z
3
z
4
_
_
_
_
es decir, Z
= AZ, donde Z = (z
1
, z
2
, z
3
, z
4
)
T
. En este caso, se trata de un sistema lineal
de primer orden homogeneo y con coecientes constantes. Los sistemas lineales de primer
orden ser an de la forma
Y
(t) = A(t)Y (t) + G(t),
donde Y (t), G(t), Y
(t) R
n
y A(t) M
n,n
(R).
En general los sistemas de primer orden ser an de la forma
Y
(t) = F(t, Y ),
donde F es una funci on vectorial, posiblemente no lineal. Por ejemplo, el movimiento de
una partcula en el espacio est a gobernado por la ley de Newton
my
1
= F
1
(t, y
1
, y
2
, y
3
, y
1
, y
2
, y
3
)
my
2
= F
2
(t, y
1
, y
2
, y
3
, y
1
, y
2
, y
3
)
my
3
= F
3
(t, y
1
, y
2
, y
3
, y
1
, y
2
, y
3
),
se puede escribir como sistema de primer orden,
y
1
= z
1
,
y
2
= z
2
,
y
3
= z
3
,
z
1
=
1
m
F
1
(t, y
1
, y
2
, y
3
, z
1
, z
2
, z
3
),
z
2
=
1
m
F
2
(t, y
1
, y
2
, y
3
, z
1
, z
2
, z
3
),
z
3
=
1
m
F
3
(t, y
1
, y
2
, y
3
, z
1
, z
2
, z
3
).
Un ejemplo cl asico de sistema de primer orden no lineal es el conocido como proble-
ma del depredador-presa. Sean y
1
(t) e y
2
(t) la poblaci on en el instante t de una familia
de presas y depredadores respectivamente (por ejemplo, conejos y zorros). Si la presa
tiene alimento suciente y el depredador se alimenta exclusivamente de la presa, Lot-
ka y Volterra (Alfred J. Lotka 1880-1949 biofsico americano, Vito Volterra (1860-1940)
matem atico italiano) propusieron, en el a no 1925, el siguiente modelo matem atico, que
describe el equilibrio ecol ogico cuando ambas familias est an presentes
y
1
= ay
1
by
1
y
2
y
2
= cy
2
+ dy
1
y
2
donde los coecientes a y b indican las tasas de nacimientos y mortalidad de las presas, y
c y d mortalidad y nacimientos de depredadores.
9.2. RESULTADOS DE EXISTENCIA Y UNICIDAD 131
9.2. Resultados de existencia y unicidad
Existe una importante relaci on entre los sistemas y las ecuaciones. En efecto, una
ecuaci on de orden n
y
(n)
= f(t, y, y
, , y
(n1)
)
puede reducirse a un sistema de primer orden, introduciendo las variables y
1
= y, y
2
= y
,
y
3
= y
, .....y
n
= y
(n1)
, lo que da lugar al sistema
y
1
= y
2
y
2
= y
3
.
.
. =
.
.
.
y
n1
= y
n
y
n
= y
(n)
= f(t, y
1
, y
2
, , y
n
)
Consideraremos problemas de valor inicial de la forma
Y
(t) = F(t, Y (t))
Y (t
0
) = Y
0
,
donde F = (F
1
, F
2
, , F
n
) es una funci on vectorial, cuyo dominio D R
n+1
.
Teorema 9.2.1 (Existencia y unicidad) Si F(t, Y ) es continua y satisface una con-
dici on de Lipschitz con respecto a Y en alg un dominio D R
n+1
y (t
0
, Y
0
) D, entonces
existe una unica soluci on (t) en (t
0
h, t
0
+ h), h > 0, tal que
(t, (t)) D, t (t
0
h, t
0
+ h)
(t) = F(t, (t)), t (t
0
h, t
0
+ h)
(t
0
) = Y
0
.
Otra versi on con hip otesis m as fuertes es la siguiente
Teorema 9.2.2 (Existencia y unicidad) Si F(t, Y ) y F
i
/y
j
, i, j = 1, 2, , n, son
continuas en alg un dominio D R
n+1
y (t
0
, Y
0
) D, entonces existe una unica soluci on
(t) en (t
0
h, t
0
+ h), h > 0, tal que
(t, (t)) D, t (t
0
h, t
0
+ h)
(t) = F(t, (t)), t (t
0
h, t
0
+ h)
(t
0
) = Y
0
.
Si las funciones F
i
son lineales, el sistema es de la forma Y
= A(t)Y + G(t),
y
1
= a
11
(t)y
1
+ a
12
(t)y
2
+ + a
1n
(t)y
n
+ g
1
(t)
y
2
= a
21
(t)y
1
+ a
22
(t)y
2
+ + a
2n
(t)y
n
+ g
2
(t)
.
.
. =
.
.
.
y
n
= a
n1
(t)y
1
+ a
n2
(t)y
2
+ + a
nn
(t)y
n
+ g
n
(t),
132 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
y, en este caso, el resultado de existencia y unicidad queda en la forma
Teorema 9.2.3 (Existencia y unicidad) Si a
ij
y g
i
, i, j = 1, 2, , n, son funciones
continuas en un intervalo (, ), que contiene el punto t
0
, entonces en dicho intervalo
existe una soluci on unica del problema de valor inicial
Y
(t) = A(t)Y (t) + G(t)
Y (t
0
) = Y
0
.
Es de observar que en el caso lineal, al igual que en las ecuaciones, la existencia y
unicidad de la soluci on est a garantizada en todo el intervalo, en el cual se satisfacen las
hip otesis, mientras que para un sistema no lineal solamente queda garantizada la soluci on
en un entorno de t
0
. En otras palabras, en el caso lineal el teorema tiene car acter global,
mientras en el caso no lineal tiene car acter local .
9.3. Resoluci on de sistemas por eliminaci on
En el caso de sistemas con coecientes constantes, es posible la resoluci on mediante
eliminaci on sucesiva de variables dependientes hasta encontrar una sola ecuaci on, de orden
superior, que contenga una sola variable dependiente.
Ejemplo 9.3.1 Resolver, por eliminaci on, el siguiente sistema
x
(t) = 3x(t) 4y(t)
y
(t) = 4x(t) 7y(t).
Despejando x(t), en funci on de y(t) e y
(t), en la segunda ecuaci on, y sustituyendo en
la primera se obtiene la ecuaci on de segundo orden
y
(t) + 4y
(t) 5y(t) = 0.
Se calcula y(t), y a continuaci on x(t), resultando
y(t) = e
5t
+ e
t
x(t) = 1/2e
5t
+ 2e
t
.
Este metodo se generaliza para cualquier sistema lineal, con coecientes constantes,
independientemente del orden de las ecuaciones, y es operativo cuando el n umero de
ecuaciones es bajo (2 o 3 ecuaciones).
9.4. SISTEMAS LINEALES HOMOG
ENEOS 133
Supongamos el sistema
L
1
[x] + L
2
[y] = f
1
L
3
[x] + L
4
[y] = f
2
,
donde L
1
, L
2
, L
3
y L
4
son operadores diferenciales con coecientes constantes. Se pue-
de eliminar una variable dependiente multiplicando convenientemente las ecuaciones por
operadores, por ejemplo si multiplicamos la primera por L
4
, la segunda por L
2
y resta-
mos se anula la variable y(t). Esto es posible porque los operadores conmutan, al ser los
coecientes constantes.
De esta manera se obtienen dos ecuaciones
(L
1
L
4
L
3
L
2
)[x] = g
1
= L
4
[f
1
] L
2
[f
2
]
(L
2
L
3
L
1
L
4
)[y] = g
2
= L
3
[f
1
] L
1
[f
2
].
Si el operador L
1
L
4
L
3
L
2
es de orden n, la soluci on general x(t) contendr a n constantes
arbitrarias e y(t) otras n. Sin embargo para x e y habr a unicamente n constantes arbi-
trarias independientes. El par de soluciones, x(t) e y(t), en terminos de las n constantes
independientes, se llama soluci on general del sistema. En el caso del ejemplo anterior sera
_
x
y
_
=
_
1/2
1
_
e
5t
+
_
2
1
_
e
t
,
o tambien
_
x
y
_
=
_
1
2
e
5t
2e
t
e
5t
e
t
__
_
= (t) .
A la matriz (t) se le llama matriz fundamental.
9.4. Sistemas lineales homogeneos
Consideremos un sistema homogeneo
Y
(t) = A(t) Y (t),
con a
ij
: (, ) R continuas, lo que garantiza una soluci on unica : (, ) R
n
,
para unas condiciones iniciales dadas.
Teorema 9.4.1 Si
1
,
2
son funciones vectoriales, soluci on del sistema, entonces
1
1
+
2
tambien es soluci on.
Esto quiere decir que el conjunto de soluciones del sistema lineal es un subespacio
vectorial del conjunto de funciones vectoriales C
1
(, ). Demostraremos que la dimensi on
de ese subespacio es n.
134 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Teorema 9.4.2 Sean
1
,
2
, ,
n
soluciones de Y
= AY tales que
j
(t
0
) = E
j
R
n
,
donde {E
j
}
n
1
son linealmente independientes. Entonces, {
j
(t)}
n
1
es una base del subes-
pacio de soluciones.
Denici on 9.4.1 (soluci on matricial) Una matriz (t), n n, cuyas columnas
1
,
2
, ,
n
son soluciones del sistema, linealmente independientes o no, se dice solu-
ci on matricial del sistema.
Denici on 9.4.2 (matriz fundamental) Una soluci on matricial (t) cuyas columnas
son linealmente independientes se dice matriz fundamental del sistema. Si (t
0
) = I
se dice matriz fundamental de referencia en t
0
, o matriz fundamental standard.
Un test muy simple para saber si una soluci on matricial es una matriz fundamental es
Teorema 9.4.3 Una soluci on matricial (t) es una matriz fundamental si det (t
0
) = 0
para alg un t
0
.
Este resultado es una consecuencia de los dos siguientes
Teorema 9.4.4 (F ormula de Liouville) Sea (t) una soluci on matricial del sistema
Y
= AY . Entonces
det (t) = det (t
0
) e
t
t
0
a
ii
()d
.
Esta expresi on se conoce con el nombre de identidad de Abel o f ormula de Liouville.
Teorema 9.4.5 Una soluci on matricial (t) es matriz fundamental del sistema si, y s olo
si det (t) = 0 t (, ).
Denici on 9.4.3 (wronskiano) Dada una soluci on matricial (t), se llama wronskiano
a det (t).
El wronskiano de un sistema est a ntimamente relacionado con el mismo concepto
denido para las ecuaciones.
Ejercicio 9.4.1 Consideremos la ecuaci on de segundo orden y
+ p(t)y
+ q(t)y = 0 y el
sistema de primer orden asociado. Comprobar que el cociente de los respectivos wronskia-
nos es una constante.
9.5. SISTEMAS LINEALES NO HOMOG
ENEOS 135
9.5. Sistemas lineales no homogeneos
Consideremos el sistema lineal no homogeneo
Y
= A(t) Y + G(t),
donde A y G son continuas en un intervalo (, ). Conocida una matriz fundamental
(t) = [
1
,
2
,
n
], formada por n soluciones linealmente independientes del sistema
homogeneo Y
= AY , entonces podemos expresar la soluci on general del sistema no
homogeneo como
(t) = C +
(t)
donde C es un vector columna arbitrario y
una soluci on particular.
La soluci on particular se puede calcular por variaci on de par ametros
(t) = (t)
_
t
t
0
1
()G()d.
Teorema 9.5.1 Si (t) es una matriz fundamental del sistema Y
= AY , entonces la
soluci on unica del problema de valor inicial
Y
(t) = A(t)Y (t) + G(t)
Y (t
0
) = E
viene dada por
(t) = (t)
1
(t
0
)E + (t)
_
t
t
0
1
()G()d.
9.6. Sistemas lineales con coecientes constantes
9.6.1. Sistemas homogeneos
Consideremos el sistema homogeneo Y
= AY , A M
n,n
(R).
La soluci on general de un sistema homogeneo puede obtenerse calculando una ma-
triz fundamental o bien calculando directamente las n funciones vectoriales linealmente
independientes y que sean soluci on del sistema
Calculo de una matriz fundamental
Denici on 9.6.1 Dada la matriz A M
n,n
(R), denimos la matriz exponencial e
A
de
la siguiente manera
e
A
= I +
n
k=1
A
k
k!
,
136 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
donde A
k
es la potencia k-esima de A.
Teorema 9.6.1 Si A es una matriz cuadrada constante, entonces
(t) = e
tA
es una matriz fundamental del sistema Y
= AY . Si Y (t
0
) = E, entonces la soluci on
unica del correspondiente problema de valor inicial est a dada por
(t) = e
A(tt
0
)
E.
Ejemplo 9.6.1 Encontrar una matriz fundamental del sistema, y calcular la soluci on
general.
x
(t) = 3x(t) 4y(t)
y
(t) = 4x(t) 7y(t).
Para calcular e
At
diagonalizamos previamente la matriz A. Se obtiene
A =
_
3 4
4 7
_
, D =
_
5 0
0 1
_
, P =
_
1 2
2 1
_
, P
1
=
1
3
_
1 2
2 1
_
,
con lo cual
A = PDP
1
= e
At
= Pe
Dt
P
1
= P
_
e
5t
0
0 e
t
_
P
1
.
Se obtiene
e
At
=
1
3
_
e
5t
+ 4e
t
2e
5t
2e
t
2e
5t
+ 2e
t
4e
5t
e
t
_
.
En realidad no es necesario calcular explcitamente e
At
, ya que las columnas de esta matriz
son combinaci on lineal de las columnas de Pe
Dt
= e
At
P. Por tanto, Pe
Dt
tambien es una
matriz fundamental del sistema, con lo que nos evitaramos el c alculo de P
1
(t) = Pe
Dt
=
_
1 2
2 1
__
e
5t
0
0 e
t
_
=
_
e
5t
2e
t
2e
5t
e
t
_
La soluci on general del sistema es una combinaci on lineal de las columnas de la matriz
fundamental que, nalmente, puede ponerse en la forma
_
x
y
_
=
_
1
2
_
e
5t
+
_
2
1
_
e
t
.
Ejecutando el comando dsolve de MATLAB
EDU)) [x,y]=dsolve(Dx-3*x+4*y=0,Dy-4*x+7*y=0)
9.6. SISTEMAS LINEALES CON COEFICIENTES CONSTANTES 137
se obtiene como soluci on general de este sistema
x = 1/3 C1 exp(5 t) + 4/3 C1 exp(t) 2/3 C2 exp(t)
+2/3 C2 exp(5 t)
y = 2/3 C1 exp(t) 2/3 C1 exp(5 t) + 4/3 C2 exp(5 t)
1/3 C2 exp(t).
Como puede observarse, esta soluci on general es combinaci on lineal de columnas de la
matriz fundamental, e
At
, obtenida anteriormente.
Si la matriz no es diagonalizable es posible encontrar la soluci on general mediante el
c alculo de una matriz fundamental, con la ayuda de las cajas de Jordan.
Ejemplo 9.6.2 Encontrar la soluci on general del sistema, mediante el c alculo de una
matriz fundamental
Y
=
_
_
2 0 0
3 2 0
5 2 1
_
_
Y
Los valores propios son
1
= 1,
2
=
3
= 2 y los vectores propios asociados son
B
1
= (0, 0, 1)
T
y B
2
= (0, 3, 2)
T
. La matriz no es diagonalizable. La matriz reducida de
Jordan y las matrices de paso son
J =
_
_
1 0 0
0 2 1
0 0 2
_
_
, P =
_
_
0 0 1
0 3 2
1 2 1
_
_
, P
1
=
1
3
_
_
7 2 3
2 1 0
3 0 0
_
_
.
Por tanto una matriz fundamental es
e
At
= Pe
Jt
P
1
= P
_
_
e
t
0 0
0 e
2t
te
2t
0 0 e
2t
_
_
P
1
,
obteniendo nalmente
e
At
=
1
3
_
_
3e
2t
0 0
3e
2t
+ 9te
2t
3e
2t
0
7e
t
+ 7e
2t
6te
2t
2e
t
2e
2t
3e
t
_
_
.
La soluci on general es una combinaci on lineal de sus columnas.
Como ya hemos dicho anteriormente, Pe
Jt
tambien es una matriz fundamental del
sistema,
(t) = Pe
Jt
=
1
3
_
_
0 0 e
2t
0 3e
2t
3te
2t
+ 2e
2t
e
t
2e
2t
2te
2t
+ e
2t
_
_
.
138 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
La soluci on que proporciona MATLAB es
EDU)) [x,y,z]=dsolve(Dx=2*x,Dy=3*x+2*y,Dz=5*x-2*y-z)
x = exp(2 t) C1,
y = 3 t exp(2 t) C1 + exp(2 t) C2,
z = 7/3 exp(2 t) C1 7/3 C1 exp(t) 2 t exp(2 t) C1
2/3 exp(2 t) C2 + 2/3 C2 exp(t) + exp(t) C3.
.
Calculo de las funciones vectoriales
Proposici on 9.6.2 Be
t
es soluci on del sistema Y
= AY es un valor propio de
la matriz A y B un vector propio asociado.
Por tanto, cuando una matriz es diagonalizable, con lo cual tiene n vectores propios
independientes, es posible encontrar n soluciones linealmente independientes.
Es el caso ya comentado, en el ejemplo primero. Podamos haber escrito la soluci on
general directamente, una vez conocidos los valores y vectores propios,
Ejemplo 9.6.3 Calcular la soluci on general del sistema
x
(t) = 3x(t) 4y(t)
y
(t) = 4x(t) 7y(t).
_
x
y
_
=
_
1
2
_
e
5t
+
_
2
1
_
e
t
.
Cuando la matriz no es diagonalizable hemos de encontrar tantas soluciones lineal-
mente independientes, correspondientes a un mismo valor propio, como indique su orden
de multiplicidad. Si por ejemplo un valor propio , con orden de multiplicidad 2, genera
un subespacio propio de dimensi on 1, cuya base es el vector propio B, da lugar a una
soluci on del sistema de la forma
1
(t) = Be
t
, siendo la segunda soluci on del sistema,
linealmente independiente con la anterior, de la forma
2
(t) = Cte
t
+De
t
. No obstante,
al imponer como soluci on
2
(t) obtenemos
(C + Ct + D)e
t
= (ACt + AD)e
t
,
9.6. SISTEMAS LINEALES CON COEFICIENTES CONSTANTES 139
lo que implica
AC = C,
AD = C + D,
es decir C = B, con lo cual basta ensayar
2
(t) = Bte
t
+De
t
obteniendo D a partir de
(A I)D = B. Corresponde al ejemplo tratado anteriormente,
Ejemplo 9.6.4 Encontrar la soluci on general del sistema
Y
=
_
_
2 0 0
3 2 0
5 2 1
_
_
Y
El metodo descrito nos permite escribir directamente dos soluciones linealmente inde-
pendientes
1
=
_
_
0
0
1
_
_
e
t
,
2
=
_
_
0
3
2
_
_
e
2t
.
La tercera soluci on ser a de la forma
3
=
_
_
_
_
0
3
2
_
_
t +
_
_
b
1
b
2
b
3
_
_
_
_
e
2t
.
Se calculan estos coecientes y se obtiene la soluci on general
(t) =
_
_
0
0
1
_
_
e
t
+
_
_
0
3
2
_
_
e
2t
+
_
_
_
_
0
3
2
_
_
t +
_
_
1
2
1
_
_
_
_
e
2t
.
Si la dimensi on del subespacio propio, correspondiente a un valor propio, es dos uni-
dades menor que el orden de multiplicidad se procede como en el siguiente caso
Ejemplo 9.6.5 Comprobar que la matriz del siguiente sistema
_
_
y
1
y
2
y
3
_
_
=
_
_
3 1 0
1 0 1
1 2 3
_
_
_
_
y
1
y
2
y
3
_
_
tiene un valor propio, = 2, con orden de multiplicidad 3, y solamente un vector propio
asociado. Encontrar la soluci on general del sistema, usando los dos metodos alternativos
descritos.
140 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Efectivamente, la dimensi on del subespacio propio es 1, siendo un vector propio B
1
=
(1, 1, 1)
T
. Por tanto, solamente se obtiene una soluci on de manera directa,
1
(t) = B
1
e
2t
=
_
_
1
1
1
_
_
e
2t
.
Para obtener la segunda soluci on ensayamos
2
(t) = (B
1
t +C
2
)e
2t
, y se obtiene C
2
=
(1, 0, 0)
T
, de modo que
2
(t) =
_
_
_
_
1
1
1
_
_
t +
_
_
1
0
0
_
_
_
_
e
2t
Para obtener la tercera soluci on ensayamos
3
(t) = (B
1
t
2
+ D
2
t + D
3
)e
2t
, obteniendo
D
2
= (2, 0, 0)
T
y D
3
= (2, 0, 2)
T
. Por tanto,
3
(t) =
_
_
_
_
1
1
1
_
_
t
2
+
_
_
2
0
0
_
_
t +
_
_
2
0
2
_
_
_
_
e
2t
.
La soluci on general ser a (t) = c
1
1
(t) + c
2
2
(t) + c
3
3
(t).
El metodo alternativo consiste en calcular una matriz fundamental. En este caso la
reducida de Jordan y la matriz de paso son
J =
_
_
2 1 0
0 2 1
0 0 2
_
_
, P =
_
_
1 1 1
1 0 0
1 0 1
_
_
.
Por tanto, una matriz fundamental es
(t) = Pe
Jt
= P
_
_
e
2t
te
2t t
2
2
e
2t
0 e
2t
te
2t
0 0 e
2t
_
_
=
_
_
e
2t
(t + 1)e
2t
(
t
2
2
+ t + 1)e
2t
e
2t
te
2t
t
2
2
e
2t
e
2t
te
2t
(
t
2
2
1)e
2t
_
_
.
La soluci on general se obtiene como combinaci on lineal de las tres columnas de (t).
En el caso de valores propios complejos se pueden hacer los c alculos en el campo
complejo y posteriormente, al igual que con las ecuaciones, separar las partes reales e
imaginarias
Ejemplo 9.6.6 Encontrar la soluci on general del sistema
Y
=
_
_
0 1 2
1 0 0
1 1 1
_
_
Y
9.6. SISTEMAS LINEALES CON COEFICIENTES CONSTANTES 141
Se obtienen los valores propios
1
= 1,
2
= i y
3
= i, y los vectores propios
B
1
= (1, 1, 0)
T
, B
2
= (i, 1, 1)
T
y B
3
= (i, 1, 1)
T
. Por tanto las soluciones linealmente
independientes son
1
(t) =
_
_
1
1
0
_
_
e
t
.
La segunda y la tercera soluci on, en el campo real, pueden obtenerse separando las partes
reales e imaginarias de B
2
e
it
o de B
3
e
it
. Por ejemplo,
B
2
e
it
=
_
_
i
1
1
_
_
e
it
=
_
_
i
1
1
_
_
(cos t + i sen t) =
_
_
sen t
cos t
cos t
_
_
+ i
_
_
cos t
sen t
sen t
_
_
.
Por tanto,
2
(t) =
_
_
sen t
cos t
cos t
_
_
,
3
(t) =
_
_
cos t
sen t
sen t
_
_
.
9.6.2. Sistemas no homogeneos
Dado el sistema Y
= AY +G(t), si A es constante y las componentes del vector G son
polinomios, exponenciales, funciones senoidales o productos de funciones de estos tipos,
es posible encontrar una soluci on particular del sistema aplicando el metodo de coecien-
tes indeterminados, al igual que en el caso de ecuaciones. En este caso, los coecientes
indeterminados ser an vectores.
En el caso de expresiones repetidas en la parte no homogenea y en la soluci on de
la ecuaci on homogenea, hay una diferencia entre el metodo en el caso de sistemas y en
el de una ecuaci on. En un sistema la elecci on ordinaria para ensayar una soluci on debe
multiplicarse, no solo por la mnima potencia de t que elimine la repetici on, sino que
tambien deben conservarse las potencias menores.
Si la matriz A no es constante, o el termino no homogeneo G no es de la forma des-
crita, habr a que acudir necesariamente al metodo de variaci on de par ametros comentado
anteriormente.
Ejemplo 9.6.7 Encontrar la soluci on general del sistema
y
1
(t) = 4y
1
+ 2y
2
15te
2t
y
2
(t) = 3y
1
y
2
4te
2t
,
y calcular la soluci on que satisface las condiciones iniciales y
1
(0) = 1 e y
2
(0) = 1.
La soluci on general de la ecuaci on homogenea correspondiente es
h
=
_
1
3
_
e
2t
+
_
2
1
_
e
5t
.
142 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
Para calcular la soluci on particular, por el metodo de coecientes indeterminados, habra
que ensayar
p
=
_
a
1
b
1
_
t
2
e
2t
+
_
a
2
b
2
_
te
2t
+
_
a
3
b
3
_
e
2t
,
y calcular los seis coecientes.
La soluci on del problema de valor inicial es la siguiente
_
y
1
y
2
_
=
1
14
_
7t
2
+ 28t + 10
21t
2
+ 14t 16
_
e
2t
+
1
7
_
2
1
_
e
5t
.
Puede obtenerse con MATLAB mediante
EDU)) [y1,y2]=dsolve(Dy1=4*y1+2*y2-15*t*exp(-2*t),
Dy2=3*y1-y2-4*t*exp(-2*t),y1(0)=1,y2(0)=-1)
y1 = 5/7 exp(2 t) + 2/7 exp(5 t) 1/2 t
2
exp(2 t) + 2 t exp(2 t)
y2 = 1/7 exp(5 t) 8/7 exp(2 t) + t exp(2 t) + 3/2 t
2
exp(2 t).
9.7. Resoluci on de sistemas mediante transformada
de Laplace
El metodo de transformada de Laplace tambien puede aplicarse a la resoluci on de
sistemas. Habr a que resolver un sistema de ecuaciones algebraicas, cuyas inc ognitas son las
transformadas de las funciones dependientes, y a continuaci on, aplicando la transformada
inversa, calcular las citadas funciones.
Ejemplo 9.7.1 Resolver el siguiente problema de valor inicial mediante la transformada
de Laplace.
x
(t) = 6x 3y + 8e
t
y
(t) = 2x + y + 4e
t
x(0) = 1
y(0) = 0
Se aplica la transformada de Laplace, se resuelve el sistema algebraico cuyas inc ognitas
son L[x], L[y] y se obtiene
L[x] =
2
s 1
+
1
s 4
, L[y] =
2
3
_
1
s 1
+
1
s 4
_
.
Por tanto, la soluci on del problema de valor inicial es
_
x
y
_
=
_
2
2/3
_
e
t
+
_
1
2/3
_
e
4t
.
9.8. EJERCICIOS 143
9.8. Ejercicios
1. Encontrar la soluci on general del sistema
_
_
y
1
y
2
y
3
_
_
=
_
_
3 1 1
5 3 1
5 5 3
_
_
_
_
y
1
y
2
y
3
_
_
.
Resp.:
_
_
y
1
y
2
y
3
_
_
= c
1
_
_
1
1
0
_
_
e
2t
+ c
2
_
_
0
1
1
_
_
e
2t
+ c
3
_
_
1
1
1
_
_
e
3t
.
2. Encontrar la soluci on general del sistema
_
_
y
1
y
2
y
3
_
_
=
_
_
3 2 1
1 0 1
1 1 2
_
_
_
_
y
1
y
2
y
3
_
_
.
Resp.:
_
_
y
1
y
2
y
3
_
_
= c
1
_
_
1
1
0
_
_
e
t
+ c
2
_
_
1
1
1
_
_
e
2t
+ c
3
_
_
t
1 t
1 + t
_
_
e
2t
.
3. Resolver el siguiente sistema
x
= 2x 5y cos t
y
= x 2y + sen t (0 < t < ).
Resp.:
_
x
y
_
=
_
2 cos t sen t
cos t
_
+
_
cos t + 2 sen t
sen t
_
+
+
__
2
1
_
t +
_
1
0
__
cos t +
__
1
0
_
t +
_
1
0
__
sen t.
4. El movimiento de una partcula en el espacio viene regido por el siguiente sistema
de ecuaciones diferenciales ordinarias
x
= y
y
= x + z
z
= y
donde y son n umeros reales no nulos,
a) Resolver dicho sistema.
144 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
b) Comprobar que la trayectoria de la partcula, es decir la curva cuyas ecuaciones
parametricas son la soluci on de dicho sistema, es una curva plana.
c) Comprobar que cuando t dicha curva se aproxima a una recta cuya
direcci on se especicar a. Depende esta recta de las condiciones iniciales ?.
Resp.:
_
_
x
y
z
_
_
=
c
1
_
_
_
_
+ c
2
_
_
2
+
2
_
_
e
2
+
2
t
+ c
3
_
_
2
+
2
_
_
e
2
+
2
t
5. Consideremos el problema de valor inicial
y
1
= 3y
1
4y
2
+ t
y
2
= y
1
y
2
+ e
2t
y
1
(0) = 2
y
2
(0) = 2
a) Encontrar una matriz fundamental y la soluci on general del sistema homogeneo.
b) Resolver el sistema completo por eliminaci on, haciendo uso de una ecuaci on
de segundo orden equivalente. Comparar la soluci on general del sistema ho-
mogeneo, obtenida de esta forma, con la del apartado anterior.
c) Calcular la soluci on del problema de valor inicial.
Resp.:
_
y
1
y
2
_
=
_
2
1
_
e
t
+
_
1 + 2t
t
_
e
t
+
_
3
2
_
+
_
1
1
_
t +
_
4
1
_
e
2t
; = = 1.
6. Un modelo matem atico para una carrera armamentista entre dos pases, cuyos gastos
de defensa vienen dados por las variables x(t), y(t) est a dado por el sistema lineal
dx
dt
= x + 2y + a, x(0) = 1
dy
dt
= 4x 3y + b, y(0) = 4,
donde a y b son constantes que miden la conanza, o desconanza, que tiene cada
pas en el otro.
a) Encontrar una matriz fundamental del sistema anterior.
b) Calcular la soluci on del problema de valor inicial.
9.8. EJERCICIOS 145
c) Hay alguna posibilidad de desarme?, es decir, existen valores de a y b para
los cuales x e y tienden a 0 cuando t tiende a innito?.
d) Calcular la relaci on que deben cumplir a y b para que, al menos, la carrera
armamentista de ambos pases se estabilice.
Resp.:
_
x
y
_
=
_
2 +
2a + b
3
__
1
1
_
e
t
+
_
1 +
b a
15
__
1
2
_
e
5t
1
5
_
3a + 2b
4a + b
_
; No ;
2a + b + 6 = 0.
7. Consideremos el sistema lineal Y
= A(t) Y + G(t).
a) Denir matriz fundamental, (t), de dicho sistema. Es unica?. Razona la
respuesta.
b) Demostrar que si (t) es una matriz fundamental, entonces
(t)
_
t
t
0
1
()G()d
es una soluci on particular del sistema.
c) Calcular la soluci on general del sistema en el caso
A =
_
4 2
8 4
_
; G =
_
t
3
t
2
_
, t > 0.
Resp.:
_
y
1
y
2
_
=
_
1
2
_
+
__
1
2
_
t +
_
0
1/2
__
+
_
1/2
0
_
t
2
+
_
2
5
_
t
1
2
_
1
2
_
ln t.
8. Dado el sistema lineal
x
= x + 2y
y
= x + e
t
,
encontrar dos funciones propias linealmente independientes, asociadas al sistema
homogeneo, y calcular la unica soluci on que cumple las condiciones iniciales x(0) =
y(0) = 0.
Resp.:
1
=
_
1
1
_
e
t
;
2
=
_
2
1
_
e
2t
;
_
x
y
_
=
1
9
_
2
1
_
e
t
+
1
9
_
2
1
_
e
2t
+
2
3
_
1
1
_
te
t
.
146 CAP
ITULO 9. SISTEMAS DE ECUACIONES LINEALES DE PRIMER ORDEN
9. Consideremos la ecuaci on de segundo orden y
+2y
+y =
e
t
t
2
. Escribir el sistema de
primer orden equivalente y resolverlo, directamente, o a traves de la citada ecuaci on.
[Resp.: z
1
= y = ( + t ln |t|e
t
); z
2
= y
=
_
+ (1 t)
1
t
+ ln |t|
_
e
t
.]
10. Resolver el siguiente sistema
y
1
= y
2
,
y
2
= 4y
1
+ 4y
2
+
e
2t
t
2
,
haciendo uso de la ecuaci on de segundo orden equivalente.
Resp.: y
1
= ( + t ln |t|)e
2t
; y
2
=
_
2 + (1 + 2t) 2 ln |t| +
1
t
_
e
2t
11. Encontrar la soluci on general del sistema lineal
_
_
y
1
y
2
y
3
_
_
=
_
_
1 1 1
2 2 1
1 1 0
_
_
_
_
y
1
y
2
y
3
_
_
y la soluci on que satisface las condiciones iniciales y
1
(0) = 2, y
2
(0) = 0, y
3
(0) = 2.
Resp.:
_
_
y
1
y
2
y
3
_
_
=
_
_
1
1
0
_
_
+
_
_
_
_
1
1
0
_
_
t +
_
_
0
0
1
_
_
_
_
+
_
_
0
1
1
_
_
e
t
;
_
_
y
1
y
2
y
3
_
_
=
_
_
2
2 2e
t
2e
t
_
_
.
Captulo 10
Series de Fourier
10.1. Motivaci on
Tal como hemos visto en Captulos anteriores la ecuaci on diferencial
x
+
2
0
x = f(t)
modeliza el comportamiento de un sistema masa-resorte, con frecuencia natural
0
que
se mueve bajo la acci on de una fuerza externa f(t). Si f(t) es una funci on senoidal
(funci on seno o coseno), por ejemplo f(t) = Acos t, se obtiene f acilmente, por coecientes
indeterminados, una soluci on particular, y la soluci on general, tal como hemos visto en
un Captulo anterior, dando lugar al fen omeno de pulsaciones en el caso =
0
y al de
resonancia si =
0
.
Si f(t) es una combinaci on lineal de funciones senoidales, el tratamiento sera an alogo y
obtendramos una soluci on particular aplicando el principio de superposici on. Por ejemplo,
si
f(t) =
N
n=1
A
n
cos
n
t,
se obtiene como soluci on particular
x
p
(t) =
N
n=1
A
n
2
0
2
n
cos
n
t
si
n
=
0
, para todo n = 1, 2, , N.
En muchos sistemas mec anicos existen a menudo fuerzas externas peri odicas, que
no son combinaci on lineal de senos y cosenos. En estos casos, no hay posibilidad de
encontrar una soluci on particular por el metodo anterior. Sin embargo, si fuera posible
representar f(t) mediante una serie trigonometrica (serie de senos y cosenos), el metodo
anterior se podra generalizar en el sentido de encontrar una soluci on particular en forma
147
148 CAP
ITULO 10. SERIES DE FOURIER
de serie trigonometrica. Pues bien, en relaci on con este tema el cientco frances Joseph
Fourier (1768-1830), en el celebre tratado sobre Teora Analtica del Calor, hizo la siguiente
aseveraci on en el a no 1822: toda funci on f(t), de periodo 2, puede representarse mediante
una serie trigonometrica de la forma
a
0
2
+
n=1
(a
n
cos nt + b
n
sen nt). (10.1)
Veremos que en condiciones bastante generales para la funci on f(t), incluyendo deter-
minadas funciones discontinuas, esto realmente es cierto. Una serie de la forma anterior se
llama serie de Fourier, y la representaci on de funciones mediante series de Fourier es una
tecnica muy utilizada en Matem atica Aplicada, en especial en la resoluci on de ecuaciones
en derivadas parciales.
10.2. Funciones peri odicas y series trigonometricas
Por el momento limitaremos nuestra atenci on a funciones peri odicas de periodo 2, y
m as adelante generalizaremos a funciones con periodo arbitrario.
Estamos interesados en determinar los coecientes de la serie 10.1 para que converja
a una funci on dada f(t) de periodo 2.
Proposici on 10.2.1 El conjunto de funciones {sen mt, cos nt}, con m, n N, son orto-
gonales en el intervalo [, ], es decir
_
cos mt cos nt dt =
_
0 si m = n
si m = n
_
sen mt sen nt dt =
_
0 si m = n
si m = n
_
cos mt sen nt dt = 0, m, n.
Denici on 10.2.1 Sea una funci on f(t), continua a trozos, de periodo 2, denida para
todo t R. Denimos serie de Fourier asociada a f por
a
0
2
+
n=1
(a
n
cos nt + b
n
sen nt),
donde
a
n
=
1
f(t) cos nt dt, n = 0, 1, 2,
b
n
=
1
f(t) sen nt dt, n = 1, 2, .
10.3. SERIE DE FOURIER GENERAL 149
Puede suceder que la serie de Fourier, asociada a una funci on, no converja a dicha
funci on en algunos puntos de su dominio, por lo que escribiremos
f(t)
a
0
2
+
n=1
(a
n
cos nt + b
n
sen nt), (10.2)
sin usar el signo igual entre funci on y serie hasta estudiar su convergencia.
Ejemplo 10.2.1 Comprobar que la serie de Fourier asociada a la funci on onda cuadrada
f(t) =
_
_
_
1 si < t < 0,
1 si 0 < t < ,
0 si t = , 0,
y peri odica, de periodo 2, es
f(t)
4
n=1
sen(2n 1)t
2n 1
.
Nota 10.2.1 Para calcular series de Fourier, asociadas a funciones polin omicas, son muy
utiles las siguientes f ormulas
_
u
n
cos udu = u
n
sen u n
_
u
n1
sen udu,
_
u
n
sen udu = u
n
cos u + n
_
u
n1
cos udu.
10.3. Serie de Fourier general
Consideremos una funci on f(t) continua a trozos de periodo arbitrario P, y sea L el
semiperiodo. Si hacemos el cambio de variable t = Lx/ se obtiene una funci on
g(x) = f(t) = f
_
Lx
_
,
que es continua a trozos y de periodo 2, cuya serie de Fourier asociada es
g(x)
a
0
2
+
n=1
(a
n
cos nx + b
n
sen nx),
con los coecientes a
n
y b
n
calculados tal como se ha descrito anteriormente. Deshaciendo
el cambio de variable, es decir haciendo x = t/L se obtiene que la serie de Fourier
asociada a f(t) viene dada por
f(t)
a
0
2
+
n=1
_
a
n
cos
nt
L
+ b
n
sen
nt
L
_
, (10.3)
150 CAP
ITULO 10. SERIES DE FOURIER
donde
a
n
=
1
L
_
L
L
f(t) cos
nt
L
dt, n = 0, 1, 2,
b
n
=
1
L
_
L
L
f(t) sen
nt
L
dt, n = 1, 2, .
(10.4)
Ejemplo 10.3.1 La funci on onda cuadrada, de amplitud 1 y periodo 2L tiene por serie
de Fourier asociada
f(t)
4
n=1
_
1
2n 1
sen
(2n 1)t
L
_
.
1 0.5 0 0.5 1 1.5 2
1.5
1
0.5
0
0.5
1
1.5
Efecto de Gibbs, (nmero de trminos: 10)
1 0.5 0 0.5 1 1.5 2
1.5
1
0.5
0
0.5
1
1.5
Efecto de Gibbs, (nmero de trminos: 30)
Figura 10.1: Aproximaciones de la funci on onda cuadrada
En la Figura 10.1 est an representadas sumas parciales, 10 y 30 terminos respectiva-
mente, de la serie de Fourier asociada a la funci on onda cuadrada de periodo 2 y amplitud
1. Las oscilaciones que se producen en las proximidades de los puntos de discontinuidad
de la funci on reciben el nombre de efecto Gibbs. Su amplitud m axima, en este caso, se
estima en 0.18, que equivale al 9 % del salto.
10.4. Convergencia de una serie de Fourier
Comencemos revisando diversos conceptos de convergencia. Dada una sucesi on de
funciones {
n
(x)}, denidas en un intervalo [a, b], consideramos el problema de aproximar
una funci on f(x), denida en dicho intervalo, mediante una suma de la forma
S
N
(x) =
N
n=1
c
n
n
(x).
10.4. CONVERGENCIA DE UNA SERIE DE FOURIER 151
Si se calculan los coecientes c
n
de modo que el valor de S
N
(x) tienda al de f(x),
cuando N , para cada x [a, b], tenemos convergencia puntual, y decimos que la
serie
n=1
c
n
n
(x)
converge puntualmente a la funci on f(x). Es decir, hay convergencia puntual si: > 0 y
x [a, b] existe N
0
(x, ) tal que |f(x) S
N
(x)| < , N N
0
.
Si > 0 existe N
0
() tal que |f(x) S
N
(x)| < , N N
0
y x [a, b] decimos que
la serie
n=1
c
n
n
(x)
converge uniformemente a la funci on f(x). Signica que todas las funciones S
N
(x), a
partir de la S
N
0
(x), est an entre f(x) y f(x) + , es decir
f(x) < S
N
(x) < f(x) + N N
0
, x [a, b].
Finalmente, dada una funci on (x) > 0, si
lm
N
_
b
a
[f(x) S
N
(x)]
2
(x) dx = 0,
decimos que la sucesi on S
N
(x) converge en media cuadratica, o en el sentido mnimos
cuadrados, hacia f(x), con funci on de peso (x). El valor de la integral recibe el nombre
de desviaci on media cuadr atica de S
N
(x) respecto de f(x). El signicado de este tipo de
convergencia es que S
N
(x) aproxima muy bien a f(x) salvo en un conjunto de intervalos
cuya longitud total es muy peque na.
A la vista de estas deniciones se comprender a f acilmente que la relaci on entre estos
tipos de convergencia es la que aparece en la Figura 10.2.
Teorema 10.4.1 (Convergencia puntual. Teorema de convergencia de Fourier)
Si f(t) es una funci on peri odica, de periodo 2L, y f(t) y f
(t) continuas a trozos, entonces
la serie de Fourier asociada a f(t), dada por 10.3-10.4, converge a
f(t
+
) + f(t
)
2
.
En particular, en los puntos donde f es continua converge a f(t).
Teorema 10.4.2 (Convergencia uniforme) Si f(t) es una funci on continua y peri odi-
ca, de periodo 2L, y f
(t) continua a trozos, entonces la serie de Fourier de f(t) converge
uniformemente a f(t) en [L, L] y, por tanto, en cualquier intervalo.
152 CAP
ITULO 10. SERIES DE FOURIER
Figura 10.2: Tipos de convergencia
Consideremos el conjunto de funciones
_
cos
nt
L
_
0
,
_
sen
nt
L
_
1
, que son ortogonales
en (L, L) con funci on de peso (t) = 1. Si pretendemos aproximar la funci on f(t), en
(L, L), por medio de una suma
S
N
(t) =
p
0
2
+
N
n=1
_
p
n
cos
nt
L
+ q
n
sen
nt
L
_
,
y calculamos los coecientes p
n
y q
n
de tal manera que el error medio cuadr atico sea mni-
mo, resulta que dichos coecientes son, precisamente, los de la serie de Fourier asociada
a la funci on f.
Teorema 10.4.3 (Convergencia en media cuadratica) Si f(t) es una funci on de cua-
drado integrable en (L, L), entonces entonces la serie de Fourier asociada a f(t) converge
en media cuadr atica a f(t), en [L, L].
10.4.1. Diferenciaci on de series de Fourier
Nuestro objetivo es considerar series de Fourier como posibles soluciones de ecuaciones
diferenciales, por lo que necesitamos precisar en que condiciones es posible derivar termino
a termino una serie de Fourier de una funci on y(t) de manera que la serie derivada converja
a y
(t).
10.5. FUNCIONES PARES E IMPARES. SERIES DE SENOS Y COSENOS 153
Teorema 10.4.4 (Diferenciaci on termino a termino) Si f(t) es continua para todo
t, peri odica, de periodo 2L, y f
y f
son continuas a trozos, entonces la serie de Fourier
asociada a f
es la serie
f
(t)
n=1
_
n
L
a
n
sen
nt
L
+
n
L
b
n
cos
nt
L
_
obtenida derivando termino a termino la serie de Fourier de f
f(t) =
a
0
2
+
n=1
_
a
n
cos
nt
L
+ b
n
sen
nt
L
_
.
10.4.2. Integraci on de series de Fourier
Teorema 10.4.5 (Integraci on termino a termino) si f(t) es una funci on peri odica,
de periodo 2L, tal que f y f
son continuas a trozos y la serie de Fourier asociada a f es
f(t)
a
0
2
+
n=1
_
a
n
cos
nt
L
+ b
n
sen
nt
L
_
,
entonces, para todo t se tiene
_
t
0
f(s)ds =
a
0
t
2
+
n=1
L
n
_
a
n
sen
nt
L
b
n
_
cos
nt
L
1
__
donde la serie del segundo miembro, resultado de integrar termino a termino la asociada
a f, converge para todo t.
10.5. Funciones pares e impares. Series de senos y
cosenos
Si una funci on es par, de periodo 2L, f(t) cos(nt/L) tambien es par, mientras que
f(t) sen(nt/L) ser a impar. Por tanto,
a
n
=
2
L
_
L
0
f(t) cos
nt
L
dt, b
n
= 0.
Es decir, si f(t) es par
f(t)
a
0
2
+
n=1
a
n
cos
nt
L
,
154 CAP
ITULO 10. SERIES DE FOURIER
3 2 1 0 1 2 3
1.5
1
0.5
0
0.5
1
1.5
Dientes de sierra, (nmero de trminos: 10)
Figura 10.3: Funci on dientes de sierra
donde a
0
y a
n
vienen dados por la expresi on anterior.
Si f(t) es impar
f(t)
n=1
b
n
sen
nt
L
,
donde
b
n
=
2
L
_
L
0
f(t) sen
nt
L
dt,
ya que f(t) cos(nt/L) ser a impar, y por tanto a
n
= 0.
Ejemplo 10.5.1 Comprobar que la serie de Fourier asociada a la funci on dientes de
sierra, f(t) = t si L < t < L y peri odica, de periodo 2L es
f(t)
2L
n=1
(1)
n+1
n
sen
nt
L
.
Ejemplo 10.5.2 Comprobar que la serie de Fourier asociada a la funci on onda triangular
f(t) =
_
t L t 0
t 0 t L,
y peri odica, de periodo 2L, es
f(t) =
L
2
4L
n=1
1
(2n 1)
2
cos
(2n 1)t
L
.
10.5. FUNCIONES PARES E IMPARES. SERIES DE SENOS Y COSENOS 155
Demostrar que
n=1
1
(2n 1)
2
=
2
8
,
y comprobar que la serie derivada es la serie de Fourier asociada a la funci on onda cua-
drada.
2 1.5 1 0.5 0 0.5 1 1.5 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Onda triangular, (nmero de trminos: 2)
2 1.5 1 0.5 0 0.5 1 1.5 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Onda triangular, (nmero de trminos: 5)
Figura 10.4: Funci on onda triangular
En estos dos ejemplos, hemos obtenido dos series de Fourier distintas que convergen a
la misma funci on, f(t) = t, en el intervalo (0, L). Por tanto, si se requiere expresar dicha
funci on por una serie de Fourier en (0, L) es posible hacerlo por una serie de senos o por
una serie de cosenos. En el primer caso, f(t) es extendida en el intervalo (L, 0) como
una funci on impar y en el resto de R peri odicamente, con periodo 2L, y en el segundo
caso como una funci on par en (L, 0) y peri odicamente al resto de R. Si la funci on f(t)
fuera extendida de cualquier otra forma en (L, 0), y peri odicamente al resto de R, la
serie de Fourier resultante tambien converger a en (0, L), pero involucrar a ambos terminos,
senos y cosenos. Todas las alternativas son v alidas, y la forma de desarrollo a emplear
depender a del prop osito para el cual se necesite.
Si tenemos en cuenta la velocidad de convergencia, la serie de cosenos para la onda
triangular converge m as r apidamente que la de senos para la diente de sierra, aunque
ambas convergen a la misma funci on en (0, L). [Ver Figuras 10.3-10.4]. Esto se debe a que
la onda triangular es mas regular y por tanto mas f acil de aproximar. En general, cuantas
mas derivadas continuas tenga una funci on en el intervalo (, ), m as r apidamente
converger a su serie de Fourier.
156 CAP
ITULO 10. SERIES DE FOURIER
10.6. Ejercicios
1. Encontrar las series de Fourier asociadas, respectivamente, a las siguientes funciones
peri odicas, de periodo 2
a) f(t) = t, donde < t . Representar S
1
, S
2
y S
3
.
b) f(t) = t
2
, donde < t . Representar S
1
y S
2
.
c)
f(t) =
_
0 si < t 0,
t si 0 < t .
2. Encontrar la serie de Fourier asociada a la funci on f(t) = cos
2
t, t .
3. Encontrar la serie de Fourier asociada a la funci on f(t) = | sen t|, t y,
como consecuencia, demostrar que
4
=
1
2
+
1
1 3
1
3 5
+
1
5 7
1
7 9
+
Sol. | sen t| =
2
+
4
n=1
1
1 4n
2
cos 2nt.
4. Sea f(t) una funci on de periodo 2 tal que
f(t) =
_
t
2
, 0 < t < 2,
2, t = 0, 2.
Calcular una serie de Fourier asociada a tal funci on.
Comprobar, como consecuencia, que
n=1
1
n
2
=
2
6
,
n=1
(1)
n+1
n
2
=
2
12
.
Sol. f(t) =
4
3
+
4
n=1
cos nt
n
2
4
n=1
sen nt
n
5. Desarrollar f(t) = e
t
en serie de cosenos sobre el intervalo [0, 1].
Sol. f(t) = e 1 +
n=1
2
1 + n
2
2
(e(1)
n
1) cos nt.
10.6. EJERCICIOS 157
6. Encontrar la serie de senos asociada a la funci on
f(t) =
_
_
_
0, 0 < t <
1, < t < 2
2, 2 < t < 3.
Sol. f(t)
n=1
2
n
_
cos
n
3
+ cos
2n
3
2 cos n
_
sen
nt
3
.
7. a) Obtener la serie trigonometrica de Fourier de la funci on
f(x) =
_
k sen Tx si x [0,
T
]
0 si x [
T
, 0)
siendo f(x + 2/T) = f(x), x R.
b) Sumar la serie numerica
n=1
(1)
n+1
4n
2
1
8. Sea f(x) una funci on continua a trozos denida en el intervalo [0, l/2]. Se dene a
partir de ella la funci on
F(x) =
_
f(x) x [0,
l
2
]
f(l x) x (
l
2
, l]
la cual se extiende a [l, 0) como una funci on impar, y en todos los dem as puntos
del eje real como una funci on peri odica de periodo 2l.
a) Probar que la serie de Fourier de F(x) se puede expresar como
b
n
sen
nx
l
donde
b
n
=
2
l
_ l
2
0
f(x) sen
nx
l
dx +
2
l
_
l
l
2
f(l x) sen
nx
l
dx
b) Mediante un cambio de variable adecuado en la segunda integral de la relaci on
anterior, probar que
b
2n1
=
4
l
_ l
2
0
f(x) sen
(2n 1)x
l
dx
y que b
2n
= 0, (n N), con lo que la serie de Fourier de F(x) se puede expresar
n=1
b
2n1
sen
(2n 1)x
l
158 CAP
ITULO 10. SERIES DE FOURIER
c) Aplicar este resultado al caso particular en el que f(x) = x, x [0, l/2],
representando gr acamente la funci on F(x) asociada.
d) Representar gr acamente la funci on F
(x) y calcular la serie de Fourier a partir
de la de F(x).
e) Escribir la serie de Fourier de F(x) del apartado 3 en el caso particular de que
[l, l] = [, ] y obtener a partir de ella la suma de la serie
n=1
1
(2n 1)
2
.
Nota : Utilizar la siguiente relaci on cuando sea necesario
_
xsen axdx =
sen ax
a
2
xcos ax
a
+ C.
Captulo 11
E.D.P. y problemas de contorno
11.1. Motivaci on
Una de las ecuaciones en derivadas parciales cl asicas es la que describe la conducci on
de calor en un cuerpo s olido. Consideremos una barra recta, cilndrica, delgada, de secci on
transversal uniforme, cuya area A es peque na comparada con la longitud L, de material
homogeneo y cuya supercie lateral est a aislada de modo que no pasa calor a traves de
ella. Supondremos tambien que est a orientada de tal modo que el eje Ox coincida con el
de la barra, cuyos extremos son x = 0 y x = L.(Ver Figura 11.1). Con estas hip otesis
podemos asumir que la temperatura depende unicamente de la posici on sobre el eje Ox
y del tiempo t, es decir
u = u(x, t)
lo que supone que la temperatura en cualquier secci on es constante.
En estas condiciones se demuestra que la ecuaci on de conducci on de calor es
u
t
=
2
u
xx
,
donde
2
= k/s es un coeciente que depende unicamente del material de la barra y
se llama difusividad termica (k es la conductividad termica, la densidad y s el calor
especco).
Para poder determinar completamente el ujo de calor a traves de la barra es necesario
indicar la distribuci on de temperatura en un instante jo, generalmente t = 0, e imponer
condiciones en los extremos de la barra, por ejemplo jar la temperatura en ambos puntos.
159
160 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
Figura 11.1: Barra homogenea de secci on uniforme
11.2. Ecuaciones lineales de segundo orden
Limitaremos nuestro estudio a las ecuaciones lineales de segundo orden, concretamente
en dimensi on 2, es decir ecuaciones de la forma
A(x, y)u
xx
+ B(x, y)u
xy
+ C(x, y)u
yy
+D(x, y)u
x
+ E(x, y)u
y
+F(x, y)u = G(x, y).
Si G(x, y) = 0 la ecuaci on se dice homogenea y si A, B, C, D, E y F son constantes la
ecuaci on se dice con coecientes constantes. La ecuaci on se ha escrito con las variables in-
dependientes x e y, sin embargo en muchos problemas una de las variables independientes
es el tiempo t por lo que la ecuaci on ser a escrita en terminos de x y t.
Tres tipos b asicos de ecuaciones lineales de segundo orden son: elpticas, parab olicas e
hiperb olicas, seg un que B
2
4AC sea negativo, nulo o positivo en todo punto del dominio.
Puede darse la circunstancia que una misma ecuaci on sea de varios tipos seg un sobre que
parte del dominio este actuando.
La forma mas simple de estos tres tipos de ecuaciones son
Ecuaci on de Laplace: u
xx
+ u
yy
= 0,
Ecuaci on del calor: u
t
+ c
2
u
xx
= 0,
Ecuaci on de ondas: u
tt
+ c
2
u
xx
= 0.
Esta clasicaci on se puede extender a m as variables independientes, por ejemplo con
dos y tres variables espaciales los tres tipos anteriores quedan caracterizados, respectiva-
mente, por la ecuaci on de Laplace
2
u
x
2
+
2
u
y
2
= 0,
2
u
x
2
+
2
u
y
2
+
2
u
z
2
= 0
11.3. ECUACI
ON DEL CALOR 161
la ecuaci on del calor
u
t
+ c
2
_
2
u
x
2
+
2
u
y
2
_
= 0,
u
t
+ c
2
_
2
u
x
2
+
2
u
y
2
_
= 0
y la ecuaci on de ondas
2
u
t
2
+ c
2
_
2
u
x
2
+
2
u
y
2
_
,
2
u
t
2
+ c
2
_
2
u
x
2
+
2
u
y
2
+
2
u
z
2
_
= 0
Esta clasicaci on es bastante importante, ya que el tipo de condiciones de contorno y
la naturaleza de las soluciones son distintas en los tres casos. Corresponden a tres clases
distintas de fen omenos fsicos: estados de equilibrio (Laplace), difusi on (ecuaci on del calor)
y vibraciones y propagaci on de ondas (ecuaci on de ondas).
En esta breve rese na solamente trataremos el metodo de separaci on de variables, que
es quiz as el m as antiguo para resolver e.d.p. (ya fue usado por DAlembert, D. Bernouilli
y Euler en 1750 para tratar la ecuaci on de ondas), y que b asicamente consiste en la
sustituci on de la e.d.p. por un conjunto de e.d.o., y la representaci on de la soluci on por
medio de una serie de Fourier.
11.3. Ecuaci on del calor
Estudiaremos unicamente la ecuaci on del calor en una dimensi on espacial. La tempe-
ratura en el instante t y en el punto x de una barra, tal como la de la Figura 11.1, de
longitud L, cuyos extremos est an a T
1
y T
2
grados respectivamente, y cuya distribuci on
inicial de temperatura es u(x, 0) = f(x), viene dada por
c
2
u
xx
= u
t
, 0 < x < L, t > 0
u(0, t) = T
1
, t > 0
u(L, t) = T
2
, t > 0,
u(x, 0) = f(x), 0 < x < L.
Se trata de una ecuaci on parab olica, con condiciones de contorno no homogeneas y
condici on inicial f(x).
11.3.1. Condiciones de contorno homogeneas
Se trata de calcular u(x, t) tal que
c
2
u
xx
= u
t
, 0 < x < L, t > 0
u(0, t) = 0, t > 0
u(L, t) = 0, t > 0,
u(x, 0) = f(x), 0 < x < L.
162 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
El metodo de separaci on de variables est a basado en la idea de determinar ciertas
soluciones de la ecuaci on diferencial de la forma
u(x, t) = X(x)T(t).
Indicando
X
(x) =
dX
dx
, T
(t) =
dT
dt
resultar a la siguiente ecuaci on
c
2
X
T = XT
X
=
1
c
2
T
T
en la cual las variables est an separadas. Esta ultima ecuaci on ser a v alida x (0, L),
t > 0, por lo que ambos miembros ser an iguales a una constante, llamada constante de
separaci on, que indicaremos por
X
X
=
1
c
2
T
T
= .
De las condiciones de contorno de nuestro problema se deduce que X(0) = X(L) = 0. Por
tanto, la funci on X(x) ha de ser tal que
X
+X = 0
X(0) = 0
X(L) = 0.
Se trata de un problema de contorno, de naturaleza completamente distinta de los proble-
mas de valor inicial, que solamente tiene soluci on para determinados valores del par ametro
, denominados valores propios, y las soluciones correspondientes a esos valores se les de-
nomina funciones propias.
En este caso los valores propios del problema son
n
=
n
2
2
L
2
, n = 1, 2, 3,
y las correspondientes funciones propias
X
n
(x) = sen
nx
L
, n = 1, 2, 3, .
Para estos valores propios la ecuaci on diferencial ordinaria en la variable T(t) es
T
+
c
2
n
2
2
L
2
T
= 0,
cuyas las soluciones no triviales ser an de la forma
T
n
(t) = e
c
2
n
2
2
L
2
t
.
11.3. ECUACI
ON DEL CALOR 163
Hemos obtenido dos sucesiones X
n
(x) y T
n
(t) que dan lugar a la sucesi on de funciones
producto
u
n
(x, t) = X
n
(x)T
n
(t) = e
c
2
n
2
2
L
2
t
sen
nx
L
.
Cada una de estas funciones, y cualquier combinaci on lineal, satisface la ecuaci on del calor
y las condiciones de contorno homogeneas. Se trata ahora de combinar estas funciones
para que satisfaga tambien la condici on no homogenea u(x, 0) = f(x). Con una combi-
naci on lineal ser a improbable que se pueda ajustar esta condici on, a menos que f(x) sea
combinaci on lineal del mismo tipo de senos, por lo que supondremos
u(x, t) =
n=1
c
n
u
n
(x, t) =
n=1
c
n
e
c
2
n
2
2
L
2
t
sen
nx
L
,
que al imponer la condici on inicial da lugar a
u(x, 0) =
n=1
c
n
sen
nx
L
= f(x).
Por tanto los valores c
n
buscados son los coecientes de la serie de Fourier de senos de
f(x), es decir
c
n
=
2
L
_
L
0
f(x) sen
nx
L
dx.
Por tanto, con estos coecientes c
n
u(x, t) =
n=1
c
n
e
c
2
n
2
2
L
2
t
sen
nx
L
,
ser a una soluci on formal en serie del problema de contorno original.
Todo esto ser a posible siempre que f(x) satisfaga las condiciones del teorema de con-
vergencia de Fourier en (0, L). En ese caso se considera la extensi on impar a (L, 0) y
peri odicamente, con periodo 2L, al resto de R, para obtener la serie de senos de f(x).
Se demuestra que si f(x) est a acotada en [0, L] la serie obtenida converge uniforme-
mente a una funci on continua, u(x, t), que se puede derivar dos veces respecto a la variable
x y una vez respecto a t y que, en denitiva, la soluci on formal es la soluci on del problema.
Es de observar que la soluci on obtenida tiende a la funci on nula cuando t , tal
como era de esperar, ya que los extremos de la barra se mantienen a cero grados.
Ejercicio 11.3.1 Los extremos x = 0 y x = L de una barra, que se encuentra inicialmen-
te a una temperatura descrita por la funci on f(x) = sen x/L, se encuentran inicialmente
a 0 grados. Deducir la distribuci on de temperatura u(x, t) y vericar completamente la so-
luci on.
164 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
La temperatura u(x, t) ser a tal que
c
2
u
xx
= u
t
, 0 < x < L, t > 0
u(0, t) = 0, t > 0,
u(L, t) = 0, t > 0,
u(x, 0) = sen
x
L
, 0 < x < L.
Aplicando el procedimiento anterior se obtiene f acilmente
u(x, t) = e
c
2
2
L
2
t
sen
x
L
,
que se puede comprobar satisface la ecuaci on, las condiciones de contorno y la inicial.
Ejercicio 11.3.2 Resolver el problema de transmisi on de calor sobre una barra de longi-
tud unidad:
u
xx
= u
t
, 0 < x < 1, t > 0
u(0, t) = 0, t > 0,
u(L, t) = 0, t > 0,
u(x, 0) = 1, 0 < x < 1.
Al aplicar el metodo descrito anteriormente se obtiene como soluci on
u(x, t) =
4
n=1
1
2n 1
sen(2n 1)x e
(2n1)
2
2
t
.
En la Figura 11.2 est an representadas las aproximaciones de u(x, t) considerando 3 y
50 terminos, respectivamente, de su serie de Fourier.
11.3.2. Condiciones de contorno no homogeneas
Consideramos el problema
c
2
u
xx
= u
t
, 0 < x < L, t > 0
u(0, t) = T
1
, t > 0
u(L, t) = T
2
, t > 0,
u(x, 0) = f(x), 0 < x < L.
que puede quedar reducido al anterior mediante el siguiente argumento: despues de un
tiempo grande, t , se obtendr a una distribuci on de temperaturas v(x) en el estado
11.3. ECUACI
ON DEL CALOR 165
0
2
4
6
8
10
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Aproximacin de u(x,t) tomando 3 trminos de su serie de Fourier
0
2
4
6
8
10
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Aproximacin de u(x,t) tomando 50 trminos de su serie de Fourier
Figura 11.2: Representaci on de aproximaciones de u(x, t).
estacionario que ser a independiente del tiempo y de la condici on inicial. Como v(x) debe
satisfacer la ecuaci on del calor y v
t
= 0 se tiene
v
xx
= 0
v(0) = T
1
v(L) = T
2
,
cuya soluci on es
v(x) = (T
2
T
1
)
x
L
+ T
1
.
Haciendo el cambio u(x, t) = v(x) + w(x, t) se obtiene el problema con condiciones ho-
mogeneas
c
2
w
xx
= w
t
0 < x < L, t > 0
w(0, t) = 0 t > 0
w(L, t) = 0 t > 0
w(x, 0) = f(x) v(x) 0 < x < L,
cuya soluci on ser a de la forma
w(x, t) =
n=1
c
n
e
c
2
n
2
2
L
2
t
sen
nx
L
,
donde
c
n
=
2
L
_
L
0
_
f(x) (T
2
T
1
)
x
L
T
1
_
sen
nx
L
dx.
Por tanto la soluci on del problema es
u(x, t) = v(x) + w(x, t)
donde v(x) y w(x, t) son las funciones obtenidas anteriormente.
166 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
11.3.3. Barra con extremos aislados
Se supone que el ujo de calor a traves de los extremos de la barra es nulo, por lo que
hemos de calcular una funci on u(x, t) tal que
c
2
u
xx
= u
t
0 < x < L, t > 0
u
x
(0, t) = 0 t > 0
u
x
(L, t) = 0 t > 0
u(x, 0) = f(x) 0 < x < L.
Aplicando el metodo de separaci on de variables, igual que en los casos anteriores, se
obtienen los valores y funciones propias
n
=
n
2
2
L
2
, X
n
(x) = cos
nx
L
, n = 0, 1, 2, .
La soluci on formal en forma de serie de Fourier es de la forma
u(x, t) =
c
0
2
+
n=1
c
n
e
c
2
n
2
2
L
2
t
cos
nx
L
,
donde c
n
, n = 0, 1, 2, , son los coecientes de la serie de Fourier de cosenos de la funci on
f(x), es decir
c
0
=
2
L
_
L
0
f(x)dx, c
n
=
2
L
_
L
0
f(x) cos
nx
L
dx.
11.4. Ecuaci on de ondas
Se obtiene en cualquier an alisis matem atico de fen omenos de propagaci on de ondas en
un medio continuo, por ejemplo ondas ac usticas, electromagneticas etc.
Trataremos la ecuaci on de ondas en una dimensi on, y la aplicaremos a vibraciones
transversales de una cuerda el astica y exible, extendida entre soportes jos al mismo
nivel. Si es puesta en movimiento en un tiempo inicial t = 0, vibrar a libremente en un
plano vertical siempre que los efectos de amortiguamiento, tales como la resistencia del
aire, sean despreciados. En estas condiciones el problema queda planteado en los siguientes
terminos
c
2
u
xx
= u
tt
,
u(0, t) = 0,
u(L, t) = 0,
u(x, 0) = f(x),
u
t
(x, 0) = g(x).
11.4. ECUACI
ON DE ONDAS 167
La constante c
2
= T/, donde T es la tensi on de la cuerda y es la densidad de masa
constante de la cuerda (masa por unidad de longitud), la funci on inc ognita, u(x, t), indica
la altura del punto de la cuerda de abscisa x en el instante t, f(x) es la posici on inicial
de dicho punto y g(x) su velocidad inicial.
Ejemplo 11.4.1 Comprobar que la soluci on formal del problema en el caso en que g(x) =
0 es
u(x, t) =
n=1
k
n
sen
nx
L
cos
cnt
L
, k
n
=
2
L
_
L
0
f(x) sen
nx
L
dx.
La soluci on que se obtiene es la superposici on de las soluciones en forma de producto,
u(x, t) =
k
n
u
n
(x, t), conocidas como modos de vibraci on. El primer sumando
u
1
(x, t) = sen
x
L
cos
ct
L
,
se llama modo fundamental de vibraci on, y su frecuencia natural (inversa del periodo),
c/2L, se llama frecuencia fundamental o primera arm onica.
El sonido producido por una cuerda de un instrumento musical depender a de los tres
par ametros, L, T y . Dado que la frecuencia fundamental, en funci on de estos par ametros,
es
T
2L
resulta que al aumentar la tensi on aumenta la frecuencia fundamental, y esto se oye como
una nota mas alta, y al aumentar la longitud disminuye la frecuencia fundamental que da
lugar a una nota mas baja.
El segundo modo de vibraci on,
u
2
(x, t) = sen
2x
L
cos
2ct
L
,
tiene una frecuencia natural, 2c/2L, doble que la frecuencia fundamental por lo que se
llama segunda arm onica.
De igual forma, la tercera arm onica es el tercer sumando, que tiene una frecuencia
natural triple de la fundamental, etc.. El sonido que emite una cuerda vibrante incluye
la primera arm onica y las sucesivas, y el sonido que se oye depender a de la amplitud de
cada una de ellas, k
1
, k
2
,...
Ejemplo 11.4.2 Comprobar que la soluci on formal del problema, en el caso general, es
u(x, t) =
n=1
sen
nx
L
_
c
n
sen
cnt
L
+k
n
cos
cnt
L
_
,
donde
c
n
=
2
cn
_
L
0
g(x) sen
nx
L
dx, k
n
=
2
L
_
L
0
f(x) sen
nx
L
dx.
168 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
Ejercicio 11.4.1 Hallar la f ormula y(x, t) que describe los desplazamientos de una cuerda
de violn, sabiendo que responde al siguiente modelo matem atico
2
y
t
2
= a
2
2
y
x
2
y(0, t) = y(10, t) = y
t
(x, 0) = 0
y(x, 0) =
_
x
20
, 0 x < 5
1
2
x
20
, 5 x 10.
Al abordar el problema por separaci on de variables, y(x, t) = Y (x)T(t), hemos de resolver
el problema de contorno
Y
+ Y = 0
Y (0) = Y (10) = 0,
cuyos valores propios y funciones propias son
n
=
_
n
10
_
2
, Y
n
= sen
nx
10
.
A continuaci on
T
+
n
2
2
a
2
100
T = 0
T
(0) = 0,
cuyas soluciones son de la forma
T
n
(t) = cos
nat
10
.
Por tanto, la soluci on general es de la forma
y(x, t) =
c
n
cos
nat
10
sen
nx
10
.
Al imponer la otra condici on inicial, y(x, 0) = f(x), resultar a que los coecientes c
n
ser an
los de la serie de Fourier de senos de la funci on f(x), para lo cual deberemos considerar la
extensi on impar de esta funci on y a continuaci on extenderla peri odicamente, con periodo
20.
Se obtiene
y(x, t) =
n impar
2(1)
n1
2
n
2
2
cos
nat
10
sen
nx
10
.
En las Figuras 11.3 y 11.4 est an representadas las posiciones de una cuerda de lon-
gitud unidad, con el valor c = 1, considerando 8 terminos de la serie, que en el instante
inicial se separ o, por el punto medio, una distancia 0,25 de su posici on de equilibrio y se
solt o dej andola vibrar libremente.
11.5. ECUACI
ON DE LAPLACE 169
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
CUERDA VIBRANTE Instante de tiempo: 2
Figura 11.3: Posiciones de la cuerda vibrante en el instante inicial y t = 2.
11.5. Ecuaci on de Laplace
Corresponde a problemas estacionarios, por ejemplo la distribuci on estacionaria de
temperatura en una placa , suponiendo que sea conocida la temperatura en el borde,
est a caracterizada por
u
xx
+ u
yy
= 0 (x, y)
u(x, y) = f(x, y) (x, y) .
Seg un sean las condiciones de contorno, se presentan tres tipos de problemas
1. Problema de Dirichlet: la temperatura u(x, y) es conocida en la frontera.
2. Problema de Neumann:
u
n
(x, y) es conocida.
3. Problema con condiciones mixtas: en parte de la frontera es conocida u y en el resto
su derivada normal.
Ejercicio 11.5.1 (Problema de Dirichlet) Resolver el siguiente problema de contor-
no, que modela la distribuci on estacionaria de temperatura en una placa cuadrada de lado
unidad
u
xx
+ u
yy
= 0 (x, y) [0, 1] [0, 1]
u(0, y) = u(1, y) = u(x, 1) = 0
u(x, 0) = 1.
Buscamos soluciones de la forma u(x, y) = X(x)Y (y), lo que da lugar al problema de
contorno
X
+ X = 0
X(0) = X(1) = 0,
170 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
CUERDA VIBRANTE Instante de tiempo: 4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
CUERDA VIBRANTE Instante de tiempo: 8
Figura 11.4: Posiciones de la cuerda vibrante en los instantes que se indican.
cuyos valores propios y funciones propias son
n
= n
2
2
, X
n
= sen nx.
A continuaci on
Y
n
2
2
Y = 0
Y (1) = 0,
cuyas soluciones son de la forma
Y
n
= e
ny
e
n(2y)
.
Por tanto la soluci on es de la forma
u(x, y) =
c
n
_
e
ny
e
n(2y)
_
sen nx,
tal que
u(x, 0) =
c
n
_
1 e
2n
_
sen nx = 1.
Por tanto c
n
(1 e
2n
) son los coecientes de la serie de Fourier de senos de la funci on
f(x) = 1, es decir
c
n
_
1 e
2n
_
=
_
0, n par
4
n
, n impar.
Se obtiene la soluci on formal en forma de serie
u(x, y) =
n impar
4
n (1 e
2n
)
_
e
ny
e
n(2y)
_
sen nx.
Si las condiciones de contorno fueran no homogeneas sobre los cuatro lados, resolvemos
cuatro problemas de contorno, an alogos a este, de modo que cada uno de ellos tiene una
11.5. ECUACI
ON DE LAPLACE 171
Figura 11.5: Problema con condiciones de contorno mixtas
condici on no homogenea sobre uno de los lados y homogeneas en los tres lados restantes.
La soluci on del problema propuesto sera la suma de la de esos cuatro problemas.
Ejercicio 11.5.2 (Problema con condiciones mixtas) Calcular la distribuci on esta-
cionaria de temperatura en una placa rectangular = [0, 2] [0, 1] (ver Figura 11.5),
sabiendo que responde al siguiente modelo matem atico
u
xx
+ u
yy
= 0 (x, y)
u(0, y) = 0,
u(2, y) = 3 cos 2y,
u
y
(x, 0) =
u
y
(x, 1) = 0.
Al aplicar el metodo de separaci on de variables se obtiene el problema de contorno
Y
+ Y = 0
Y
(0) = Y
(1) = 0,
cuyos valores propios y funciones propias son
n
= n
2
2
, Y
n
= cos ny, n = 0, 1, 2, ...
A continuaci on resolvemos
X
n
X = 0
X(0) = 0,
172 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
0
0.5
1
1.5
2
0
0.2
0.4
0.6
0.8
1
3
2
1
0
1
2
3
Figura 11.6: Soluci on del problema con condiciones de contorno mixtas
para cada uno de los valores
n
, obteniendo X
0
(x) = x para
0
= 0, y X
n
(x) = e
nx
e
nx
para
n
= n
2
2
. Por tanto, la soluci on formal en serie es de la forma
u(x, y) = c
0
x +
n=1
c
n
(e
nx
e
nx
) cos ny,
y al imponer la ultima condici on de contorno u(2, y) = 3 cos 2y resulta c
0
= 0, c
n
= 0 si
n = 2 y c
2
(e
4
e
4
) = 3 . Es decir, la soluci on del problema queda en la forma
u(x, y) =
3(e
2x
e
2x
)
(e
4
e
4
)
cos 2y.
Su representaci on gr aca es la de la Figura 11.6.
.
11.6. Ejercicios
1. Encontrar una funci on u(x, t), 0 < x < , t > 0, tal que
u
t
= 4
2
u
2
x
u(0, t) = u(, t) = 0
u(x, 0) =
_
x, 0 x /2
x, /2 x <
11.6. EJERCICIOS 173
[Resp.: u(x, t) =
n=1
4(1)
n+1
(2n 1)
2
sen(2n 1)xe
4(2n1)
2
t
].
2. Consideremos el problema de transmisi on de calor
u
xx
= u
t
0 < x < 1 t > 0
u(0, t) = 10 u(1, t) = 0 t > 0
u(x, 0) = 10x 0 < x < 1.
Plantear un problema equivalente con condiciones de contorno homogeneas, y obte-
ner la soluci on del problema original justicando detalladamente todos los pasos.
[Resp.: u(x, t) = 10x + 10
n=1
20
n
[(1)
n
1] e
n
2
2
t
sen nx].
3. a) Encontrar los autovalores y autofunciones del problema de contorno
X
+ X = 0
X(0) = X() = 0,
y demostrar que dichas autofunciones son ortogonales, dos a dos, en el intervalo
[, ].
b) Resolver el problema de transmisi on de calor
u
xx
u
t
= 0, 0 < x < , 0 < t < ,
u(0, t) = u(, t) = 0, t > 0,
u(x, 0) = f(x),
donde f(x) = 1 para /3 < x < 2/3, y f(x) = 0 en otro caso.
Representar gr acamente u(x, 0) y una aproximaci on de u(x, 1) y u(x, 2), con-
siderando uno o dos terminos de la serie.
[Resp.: u(x, t) =
2
n=1
1
n
_
cos
n
3
cos
2n
3
_
e
n
2
t
sen nx].
4. Considerar la ecuaci on en derivadas parciales
au
xx
bu
t
+ cu = 0
donde a, b y c son constantes.
a) Hacer u(x, t) = e
kt
w(x, t), donde k es una constante, y encontrar la e.d.p.
correspondiente para w.
174 CAP
ITULO 11. E.D.P. Y PROBLEMAS DE CONTORNO
b) Si b = 0 demostrar que puede elegirse k de modo que la e.d.p. resultante no
tenga termino en w.
c) Resolver el problema de contorno
u
xx
u
t
+ 2u = 0
u(0, t) = u(1, t) = 0
u(x, 0) = 17 sen 5x 3 sen 7x
[Resp.: aw
xx
bw
t
+ (c bk)w = 0; k = c/b;
u(x, t) = 17e
(225
2
)t
sen 5x 3e
(249
2
)t
sen 7x].
5. a) Obtener, de manera razonada, la serie de Fourier de cosenos de una funci on f,
denida en un intervalo [0, L].
b) Obtener una soluci on formal en serie de Fourier de problema de contorno
x
+ 2x = t
x
(0) = x
() = 0.
Sugerencia: usar una serie de Fourier de cosenos, en la cual cada termino
satisfaga las condiciones de contorno.
[Resp.: x(t) =
4
+
4
n=1
1
(2n 1)
2
[(2n 1)
2
2]
cos(2n 1)t.]
6. Resolver el siguiente problema, que modela la distribuci on de temperatura en una
barra de longitud
u
t
= u
xx
, 0 < x < , t > 0,
u(o, t) = 0, t > 0,
u(, t) = 0, t > 0,
u(x, 0) = 1 cos
2
x, 0 < x < .
Escribir la soluci on aproximada, considerando dos terminos de la serie de Fourier
correspondiente y esbozar la gr aca de estas soluciones en los instantes t = 0 y
t = 1.
[Resp.: u(x, t) =
8
3
_
e
t
sen x
1
5
e
9t
sen 3x
_
]
Das könnte Ihnen auch gefallen
- Ecuaciones diferenciales ordinarias: Una introducciónVon EverandEcuaciones diferenciales ordinarias: Una introducciónNoch keine Bewertungen
- Analisis Vectorial y Ecuaciones Diferenciales - Javier ValdesDokument193 SeitenAnalisis Vectorial y Ecuaciones Diferenciales - Javier ValdesDeybe Valenzuela Remuzgo100% (1)
- Apuntes Duvan PDFDokument111 SeitenApuntes Duvan PDFAlejandro Andres Fuentes PavezNoch keine Bewertungen
- Notas 2023Dokument231 SeitenNotas 2023Facundo EstradaNoch keine Bewertungen
- Elementos Ecuaciones Algebraicas Javier GomezDokument345 SeitenElementos Ecuaciones Algebraicas Javier GomezAlvar100% (2)
- AnalisisMatematicoPinoReedicion2014 PDFDokument127 SeitenAnalisisMatematicoPinoReedicion2014 PDFSouseisekiNoch keine Bewertungen
- Analisis Sergio Plaza PDFDokument459 SeitenAnalisis Sergio Plaza PDFAlejandra Caicedo Herrera100% (2)
- Calculo Real y VectorialDokument328 SeitenCalculo Real y VectorialIsaac Fernández HernándezNoch keine Bewertungen
- Capitulo 2Dokument23 SeitenCapitulo 2registradoresNoch keine Bewertungen
- Ecuaciones Integrales PDFDokument184 SeitenEcuaciones Integrales PDFCRISTHIAN ALDANA100% (3)
- Calculo Avanzado de Una Variable PDFDokument165 SeitenCalculo Avanzado de Una Variable PDFJose CRNoch keine Bewertungen
- Calculo integral en varias variablesDokument112 SeitenCalculo integral en varias variablesanyelgarciaNoch keine Bewertungen
- LibroEDLat PDFDokument1.126 SeitenLibroEDLat PDFchristianNoch keine Bewertungen
- Analisis Sergio Plaza PDFDokument459 SeitenAnalisis Sergio Plaza PDFbarbara0% (1)
- Calculo IIIDokument188 SeitenCalculo IIIEve RiosNoch keine Bewertungen
- Teoría de NúmerosDokument157 SeitenTeoría de NúmerosDayler Antonio YurizzaNoch keine Bewertungen
- Análisis Matemático: Grado de MatemáticasDokument249 SeitenAnálisis Matemático: Grado de Matemáticashector hernando gutierrezNoch keine Bewertungen
- Integral Superficie 123Dokument4 SeitenIntegral Superficie 123Javier Alfredo Solsol VilcaNoch keine Bewertungen
- Modelos Matematicos en BiologiaDokument245 SeitenModelos Matematicos en BiologiaMagdaNoch keine Bewertungen
- Mecanica Clasica PDFDokument423 SeitenMecanica Clasica PDFWalter RubyNoch keine Bewertungen
- Libro Variable FIMEEDokument406 SeitenLibro Variable FIMEEAndres Mauricio100% (1)
- VariableCompleja 2122Dokument142 SeitenVariableCompleja 2122Sofia Suarez100% (1)
- Análisis Matemático: Teoría y EjerciciosDokument154 SeitenAnálisis Matemático: Teoría y Ejerciciosluis_calatayud_2100% (1)
- CalculoDokument163 SeitenCalculoafaguaga100% (2)
- Not As Electro IDokument296 SeitenNot As Electro ISylveon117100% (1)
- Continuidad 2015 2 2 PDFDokument3 SeitenContinuidad 2015 2 2 PDFM MRNoch keine Bewertungen
- Sistemas Dinamicos MecanicaDokument338 SeitenSistemas Dinamicos MecanicaErick Serrato GarciaNoch keine Bewertungen
- Medida de Lebesgue M Es Sigma AlgebraDokument140 SeitenMedida de Lebesgue M Es Sigma AlgebraIrvin Fernando Mendoza Rosado100% (1)
- Villa Cálculo Infinitesimal de Varias Variables Reales V.1 PDFDokument188 SeitenVilla Cálculo Infinitesimal de Varias Variables Reales V.1 PDFjulioNoch keine Bewertungen
- Cálculo en Varias Variables - Mario Errol Chavez GordilloDokument371 SeitenCálculo en Varias Variables - Mario Errol Chavez GordilloCael TarifaNoch keine Bewertungen
- Libro Analisis ComplejoDokument155 SeitenLibro Analisis ComplejoPedrito RG100% (1)
- Analisis Funcional PDFDokument17 SeitenAnalisis Funcional PDFJunior Lino Mera CarrascoNoch keine Bewertungen
- Notas de Matemáticas para Química 2004-2005Dokument238 SeitenNotas de Matemáticas para Química 2004-2005gurrune1Noch keine Bewertungen
- Apuntes MAT-024 - Alarcón 2017-Final PDFDokument262 SeitenApuntes MAT-024 - Alarcón 2017-Final PDFdiegoNoch keine Bewertungen
- ApuntesMatematicas I 2016Dokument225 SeitenApuntesMatematicas I 2016Alejandro Velazquez Arbona100% (1)
- Analisis Matematico Basico en Varias VariablesDokument267 SeitenAnalisis Matematico Basico en Varias VariablesgonzaNoch keine Bewertungen
- Folle To LeinerDokument300 SeitenFolle To LeinerBillyNoch keine Bewertungen
- Geometria DiferencialDokument160 SeitenGeometria DiferencialTael MartínezNoch keine Bewertungen
- Teorema de ResiduoDokument273 SeitenTeorema de ResiduoDon CarloNoch keine Bewertungen
- Analisis de Variable RealDokument97 SeitenAnalisis de Variable RealElvis TorresNoch keine Bewertungen
- Ecuaciones Diferenciales Tomo I (Villa-Acosta)Dokument309 SeitenEcuaciones Diferenciales Tomo I (Villa-Acosta)MartínCedolini100% (1)
- Alarcon APUNTES EDPDokument246 SeitenAlarcon APUNTES EDPaxel_oscNoch keine Bewertungen
- Matematicas III - ApuntesDokument121 SeitenMatematicas III - ApuntesYael Dominguez100% (1)
- Quimica CuanticaDokument219 SeitenQuimica CuanticaChris Anderson100% (1)
- Notas de Analisis Funcional PDFDokument111 SeitenNotas de Analisis Funcional PDFEdu Paredes RojasNoch keine Bewertungen
- Puntos notables y escintores de un triánguloVon EverandPuntos notables y escintores de un triánguloNoch keine Bewertungen
- Una introducción a los fundamentos del análisisVon EverandUna introducción a los fundamentos del análisisBewertung: 5 von 5 Sternen5/5 (1)
- Álgebra Lineal de Métodos de EstadísticaDokument99 SeitenÁlgebra Lineal de Métodos de EstadísticaalbgomezNoch keine Bewertungen
- Ecuaciones Diferenciales Ordinarias Universidad Del Norte CompressDokument181 SeitenEcuaciones Diferenciales Ordinarias Universidad Del Norte CompressDeLa Zunrise RiveraNoch keine Bewertungen
- Apuntes de Métodos MatemáticosDokument283 SeitenApuntes de Métodos MatemáticosAna RojasNoch keine Bewertungen
- VF 2ºcuat2022Dokument304 SeitenVF 2ºcuat2022juanixgenoNoch keine Bewertungen
- Algebra Lineal Capitulo 1Dokument68 SeitenAlgebra Lineal Capitulo 1Jesus Jilamita PimentelNoch keine Bewertungen
- Algebra Lineal Cap 1, 2 y 3Dokument194 SeitenAlgebra Lineal Cap 1, 2 y 3Luis Brayan Alejo67% (3)
- Espacios Vectoriales1Dokument305 SeitenEspacios Vectoriales1Juani ZarlengaNoch keine Bewertungen
- Algebra LinealDokument148 SeitenAlgebra LinealAlejandro Baldemar Gomez VazquezNoch keine Bewertungen
- Funciones especiales y transformadas integrales con aplicaciones a la mecánica cuántica y electrodinámicaDokument338 SeitenFunciones especiales y transformadas integrales con aplicaciones a la mecánica cuántica y electrodinámicapmcarmorg100% (1)
- Medwave - Manejo de La Temporalidad en Estudios Obs para Establecer Relaciones CausalesDokument8 SeitenMedwave - Manejo de La Temporalidad en Estudios Obs para Establecer Relaciones CausalesjaranjoNoch keine Bewertungen
- La Prueba de Ji-CuadradoDokument5 SeitenLa Prueba de Ji-Cuadradogonzalo_ruiz_13Noch keine Bewertungen
- Sujetos para La MuestraDokument6 SeitenSujetos para La Muestragonzalo_ruiz_13Noch keine Bewertungen
- Comparación de Los Promedios de Dos Muestras Independientes (Con Varianzas Desconocidas Pero Supuestas Iguales)Dokument4 SeitenComparación de Los Promedios de Dos Muestras Independientes (Con Varianzas Desconocidas Pero Supuestas Iguales)gonzalo_ruiz_13Noch keine Bewertungen
- Texto Matematicas Prepa 2010 BDokument201 SeitenTexto Matematicas Prepa 2010 BLeonardo Rodriguez Angulo100% (2)
- Series ConvergentesDokument293 SeitenSeries ConvergentesHernan NV100% (2)
- Algebra IDokument252 SeitenAlgebra IMiguel MaresNoch keine Bewertungen
- Apuntes Psu de A 2009 Libro Manual Preuniversitario Victor JaraDokument240 SeitenApuntes Psu de A 2009 Libro Manual Preuniversitario Victor JaraBraulio FuentesNoch keine Bewertungen
- NEUROCIENCIAS NeuronaDokument137 SeitenNEUROCIENCIAS NeuronajlcorderoNoch keine Bewertungen
- Algebra SuperiorDokument706 SeitenAlgebra SuperiorMary Cabrera67% (3)
- Teoría de La MedidaDokument195 SeitenTeoría de La MedidaMagdiel Delgado CastañedaNoch keine Bewertungen
- LibrocDokument243 SeitenLibrocratava444oo80% (5)
- CalculoDokument82 SeitenCalculoFelipe Alfonso Adrián Fredes MarinNoch keine Bewertungen
- Matematica para Ingenieria - Jaime Mena, Sara ArancibiaDokument463 SeitenMatematica para Ingenieria - Jaime Mena, Sara ArancibiaAdrián CanNoch keine Bewertungen
- Modulo Completo de Cal. Dif. 2011. Noviembre 3-2011Dokument304 SeitenModulo Completo de Cal. Dif. 2011. Noviembre 3-2011chevave322Noch keine Bewertungen
- Metodos Operativos de Calculo Diferencial en IngenieriaDokument144 SeitenMetodos Operativos de Calculo Diferencial en IngenieriaAnabeatriz AlonsoNoch keine Bewertungen
- Cálculo Diferencial UdecDokument115 SeitenCálculo Diferencial Udecgonzalo_ruiz_13Noch keine Bewertungen
- Notas de Cálculo Diferencial e Integral I. Flores, GilbertoDokument144 SeitenNotas de Cálculo Diferencial e Integral I. Flores, Gilbertogonzalo_ruiz_13Noch keine Bewertungen
- ModuloDokument258 SeitenModuloSindy Yuley Riveros MiguezNoch keine Bewertungen
- Introducción Al Cálculo Diferencial y Fundamentos. USTDokument112 SeitenIntroducción Al Cálculo Diferencial y Fundamentos. USTgonzalo_ruiz_13Noch keine Bewertungen
- Calculo DiferencialDokument207 SeitenCalculo DiferencialJuan Sedano NecocheaNoch keine Bewertungen
- Cálculo Diferencial en Una Variable, EpnDokument193 SeitenCálculo Diferencial en Una Variable, EpnheatingboilerNoch keine Bewertungen
- Cálculo DiferencialDokument529 SeitenCálculo DiferencialVeronica Morales Miranda100% (2)
- Apunte USM - Cálculo DiferencialDokument187 SeitenApunte USM - Cálculo DiferencialMacarena Catalán GonzálezNoch keine Bewertungen
- Calc Dif ApDokument141 SeitenCalc Dif ApJulio Indili100% (5)
- Cálculo Diferencial. Alarcón - González. UNABDokument123 SeitenCálculo Diferencial. Alarcón - González. UNABgonzalo_ruiz_13100% (2)
- Apuntes para El Curso de Cálculo I. MA1001.Vísquez, LeinerDokument85 SeitenApuntes para El Curso de Cálculo I. MA1001.Vísquez, Leinergonzalo_ruiz_13100% (1)
- Apunte Breve de Cálculo DiferencialDokument31 SeitenApunte Breve de Cálculo Diferencialgonzalo_ruiz_13Noch keine Bewertungen
- Apuntes de Cálculo I PUCDokument176 SeitenApuntes de Cálculo I PUCgonzalo_ruiz_13Noch keine Bewertungen
- NampulkafeDokument304 SeitenNampulkafeNelson MartínezNoch keine Bewertungen
- Ejercicios EyMDokument181 SeitenEjercicios EyMJhonnatan Nuñez CaballeroNoch keine Bewertungen
- Proyecciones OrtogonalesDokument10 SeitenProyecciones OrtogonalesChristian Alexis Moreto SalasNoch keine Bewertungen
- Bitacora 2Dokument12 SeitenBitacora 2camila andrea tellez sepúlvedaNoch keine Bewertungen
- Rpl7-1 La Alineacion RectaDokument16 SeitenRpl7-1 La Alineacion RectaWilder Muñoz RiveraNoch keine Bewertungen
- Ecuacion de La RectaDokument4 SeitenEcuacion de La Rectajossem CalderónNoch keine Bewertungen
- Problemario de Geometria Analitica UACDokument9 SeitenProblemario de Geometria Analitica UACArturo Vanegas SalazarNoch keine Bewertungen
- Vector EsDokument4 SeitenVector EsKenyo Flores Rayme0% (1)
- Dibujo Isometrico y 3dDokument11 SeitenDibujo Isometrico y 3djlopezsm3177Noch keine Bewertungen
- Cesar AiraDokument466 SeitenCesar AiraAndres67% (3)
- Juegos de estrategia y problemas matemáticos en el I OMCC Costa Rica 1999Dokument32 SeitenJuegos de estrategia y problemas matemáticos en el I OMCC Costa Rica 1999Billy Deybi Niño MoralesNoch keine Bewertungen
- Observadores de Jardin Castillo de Sueños Pre Jardin ADokument19 SeitenObservadores de Jardin Castillo de Sueños Pre Jardin AMARGARETH THATCHER GUZMÁN DONOSO100% (1)
- Cinematica MCUDokument2 SeitenCinematica MCUMarco Cabrejos Yarleque89% (9)
- Tecnologico Nacional de Mexico Toledo PDFDokument5 SeitenTecnologico Nacional de Mexico Toledo PDFISMAEL TOLEDO SLOZARNoch keine Bewertungen
- El espacio institucional: utilización, politización y fantasmatizaciónDokument4 SeitenEl espacio institucional: utilización, politización y fantasmatizaciónLorena CulassoNoch keine Bewertungen
- Unidad VII Fisica UNEFADokument9 SeitenUnidad VII Fisica UNEFAJesús AlburgueNoch keine Bewertungen
- La Sombra y Los ArquitectosDokument8 SeitenLa Sombra y Los ArquitectosponchitomartinezNoch keine Bewertungen
- MovRotEjeFijoDokument13 SeitenMovRotEjeFijoCristhianAlexanderVegaNoch keine Bewertungen
- Informe de Fisica 6Dokument14 SeitenInforme de Fisica 6Francisco Quintero AmayaNoch keine Bewertungen
- Geometría analítica en 3DDokument34 SeitenGeometría analítica en 3DHernán RengelNoch keine Bewertungen
- Clasificacion y Características de Las CarreterasDokument7 SeitenClasificacion y Características de Las CarreterasLuis FragosoNoch keine Bewertungen
- El Sabor Del Mundo Una Antropologia de Los SentidosDokument23 SeitenEl Sabor Del Mundo Una Antropologia de Los SentidosSandungaNoch keine Bewertungen
- MATEMATICADokument31 SeitenMATEMATICAKtherine lilianaNoch keine Bewertungen
- Tema 7 Dinamica de Un Sistema de Particulas$Dokument9 SeitenTema 7 Dinamica de Un Sistema de Particulas$JuanLoredoNoch keine Bewertungen
- Fisica EvaluacionDokument46 SeitenFisica EvaluacionhiugarNoch keine Bewertungen
- Clase 5 El Espacio GeográficoDokument44 SeitenClase 5 El Espacio Geográficosandro gabrielNoch keine Bewertungen
- INFORME Sobre Sólidos de RevoluciónDokument11 SeitenINFORME Sobre Sólidos de RevoluciónHarlynYeysonVasquezNoch keine Bewertungen
- Taller Rectas y PlanosDokument1 SeiteTaller Rectas y PlanosCamila GalindoNoch keine Bewertungen
- AUTODESTRUCCIONDokument85 SeitenAUTODESTRUCCIONJ0% (1)