Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Re Wiring FeederDokument31 SeitenRe Wiring FeederVishwanath Todurkar100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- VM55 En004Dokument172 SeitenVM55 En004Vishwanath TodurkarNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Conzerv EMDokument77 SeitenConzerv EMVishwanath TodurkarNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- VAMP LTD.: VAMP 50 Series Installation ReferencesDokument18 SeitenVAMP LTD.: VAMP 50 Series Installation ReferencesVishwanath TodurkarNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Bharat Deko 2014Dokument156 SeitenBharat Deko 2014ashu123455Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- 2 Sirius Modular SystemDokument28 Seiten2 Sirius Modular SystemVishwanath TodurkarNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Siemens Lv35 CatalogDokument133 SeitenSiemens Lv35 CatalogVijayakumar Chokkalingam100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 5kV 10kV Test Lead An en V01Dokument16 Seiten5kV 10kV Test Lead An en V01Vishwanath TodurkarNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- IMM 7960 and 7990 - ManDokument23 SeitenIMM 7960 and 7990 - ManVishwanath TodurkarNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Testing Micom P243Dokument3 SeitenTesting Micom P243DEADMANNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Micom P225: Motor Protection RelayDokument288 SeitenMicom P225: Motor Protection RelayVishwanath TodurkarNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Calculation For The Value of Stabilizing Resistor REF SettingDokument18 SeitenCalculation For The Value of Stabilizing Resistor REF SettingVishwanath TodurkarNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- G 342 Engine Part 1 PDFDokument26 SeitenG 342 Engine Part 1 PDFharley florezNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- NDP-25 Data SheetDokument4 SeitenNDP-25 Data SheetsetyaNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- MK7850NDokument6 SeitenMK7850NkherrimanNoch keine Bewertungen
- DSCDokument7 SeitenDSCthanhnguyenhhvnNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- How Cell Phones WorkDokument12 SeitenHow Cell Phones Workavinash_knitNoch keine Bewertungen
- Mohit Soni ReportDokument104 SeitenMohit Soni ReportMohitNoch keine Bewertungen
- R&D Division BrochureDokument4 SeitenR&D Division BrochureShai WeissNoch keine Bewertungen
- NORMA - ANSI-AMCA Standard 250-05 Laboratory Methods of Testing Jet Tunnel Fans For PerformanceDokument33 SeitenNORMA - ANSI-AMCA Standard 250-05 Laboratory Methods of Testing Jet Tunnel Fans For PerformanceJose Antonio100% (1)
- Lampiran BDokument3 SeitenLampiran BIqbhal WanaharaNoch keine Bewertungen
- New DatabaseDokument18 SeitenNew DatabaseShafiq RosmanNoch keine Bewertungen
- Cambridge Ordinary LevelDokument4 SeitenCambridge Ordinary LevelHaziq AfzalNoch keine Bewertungen
- Online Assignment - Aritificial LiftDokument10 SeitenOnline Assignment - Aritificial LiftfatenamiraNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Deodorization-Solutions by Alfa LavalDokument12 SeitenDeodorization-Solutions by Alfa Lavalercanefeoglu100% (1)
- Core Insights: Advances in 12G-SDIDokument3 SeitenCore Insights: Advances in 12G-SDIHedsdasNoch keine Bewertungen
- TCE BE EEE RulesandRegulationsDokument509 SeitenTCE BE EEE RulesandRegulationsAplieNoch keine Bewertungen
- Compacted Graphite Iron Was First Patented at About The Same Time As Ductile Iron in The Late 1940Dokument4 SeitenCompacted Graphite Iron Was First Patented at About The Same Time As Ductile Iron in The Late 1940Agustin GerardoNoch keine Bewertungen
- Rubric For Case StudyDokument1 SeiteRubric For Case StudyCj NavarroNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Ignitability and Explosibility of Gases and VaporsDokument230 SeitenIgnitability and Explosibility of Gases and VaporsKonstantinKot100% (3)
- HSC Chemistry SkillsDokument9 SeitenHSC Chemistry SkillsMartin KarlowNoch keine Bewertungen
- Plug Design Case StudyDokument24 SeitenPlug Design Case StudyAnonymous EsZwKlnBNoch keine Bewertungen
- TechTrax 09 2003 ScreenReaderVersionDokument84 SeitenTechTrax 09 2003 ScreenReaderVersionMCKINNONBNoch keine Bewertungen
- CS-Z25XKEW - 1, Evaporator Specification SheetDokument1 SeiteCS-Z25XKEW - 1, Evaporator Specification SheetpaulNoch keine Bewertungen
- KEDA Quotation of 2 3 4 Inch Mini Gold DredgerDokument3 SeitenKEDA Quotation of 2 3 4 Inch Mini Gold DredgerShane CapstickNoch keine Bewertungen
- American Woodworker 163 2012-2013 PDFDokument76 SeitenAmerican Woodworker 163 2012-2013 PDFkaskdos100% (1)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sample Acceptable Use Policy From Southern Regional High SchoolDokument4 SeitenSample Acceptable Use Policy From Southern Regional High Schoolapi-356000194Noch keine Bewertungen
- Geothermal Project TimelinesDokument10 SeitenGeothermal Project TimelinesAldwin EncarnacionNoch keine Bewertungen
- ASME B16.47 Series A FlangeDokument5 SeitenASME B16.47 Series A FlangePhạm Trung HiếuNoch keine Bewertungen
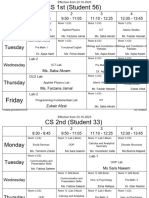
- 3b - Classwise Time Table - 2Dokument15 Seiten3b - Classwise Time Table - 2Hamza khalidNoch keine Bewertungen
- Click and Learn How To Get Free TikTok FansDokument4 SeitenClick and Learn How To Get Free TikTok FansFreedmanMcFadden9Noch keine Bewertungen
- Sneha Foundation PlusDokument17 SeitenSneha Foundation PlusBikash KumarNoch keine Bewertungen