Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Day - 2Dokument17 SeitenDay - 2Sivakumar RavichandranNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Day - 1Dokument19 SeitenDay - 1Sivakumar RavichandranNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Day - 1Dokument14 SeitenDay - 1Sivakumar RavichandranNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Day - 4Dokument19 SeitenDay - 4Sivakumar RavichandranNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Day - 4Dokument14 SeitenDay - 4Sivakumar RavichandranNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Day - 5Dokument41 SeitenDay - 5Sivakumar RavichandranNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Day - 3Dokument29 SeitenDay - 3Sivakumar RavichandranNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Day - 1Dokument2 SeitenDay - 1Sivakumar RavichandranNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Day - 4Dokument27 SeitenDay - 4Sivakumar RavichandranNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Day - 1Dokument31 SeitenDay - 1Sivakumar RavichandranNoch keine Bewertungen
- Day - 2Dokument15 SeitenDay - 2Sivakumar RavichandranNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Day - 3Dokument22 SeitenDay - 3Sivakumar RavichandranNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Day - 1Dokument13 SeitenDay - 1Sivakumar RavichandranNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Day - 3Dokument10 SeitenDay - 3Sivakumar RavichandranNoch keine Bewertungen
- Day - 3Dokument21 SeitenDay - 3Sivakumar RavichandranNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Day - 1Dokument41 SeitenDay - 1Sivakumar RavichandranNoch keine Bewertungen
- Day - 1Dokument21 SeitenDay - 1Sivakumar RavichandranNoch keine Bewertungen
- Day - 5Dokument8 SeitenDay - 5Sivakumar RavichandranNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Day - 3Dokument13 SeitenDay - 3Sivakumar RavichandranNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Day - 5Dokument36 SeitenDay - 5Sivakumar RavichandranNoch keine Bewertungen
- Electronic Components Used in Mobile PhoneDokument11 SeitenElectronic Components Used in Mobile PhoneSivakumar RavichandranNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hardware - 3 MonthsDokument13 SeitenHardware - 3 MonthsSivakumar RavichandranNoch keine Bewertungen
- A+ Syllabus - 2 MonthsDokument8 SeitenA+ Syllabus - 2 MonthsSivakumar RavichandranNoch keine Bewertungen
- CommunicationDokument49 SeitenCommunicationSivakumar RavichandranNoch keine Bewertungen
- Cell Phone Servicing SyllabusDokument2 SeitenCell Phone Servicing SyllabusSivakumar RavichandranNoch keine Bewertungen
- Hardware BookDokument63 SeitenHardware BookSivakumar RavichandranNoch keine Bewertungen
- GSMDokument10 SeitenGSMSivakumar RavichandranNoch keine Bewertungen
- CommunicationDokument49 SeitenCommunicationSivakumar RavichandranNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Operating Systems: Jerry BreecherDokument17 SeitenOperating Systems: Jerry BreecherSivakumar RavichandranNoch keine Bewertungen
- Networking Essentials2005Dokument42 SeitenNetworking Essentials2005Sivakumar RavichandranNoch keine Bewertungen
- Lecture-4 Features of MicroprocessorDokument21 SeitenLecture-4 Features of MicroprocessorMuhammad MusaddiqNoch keine Bewertungen
- 8051 MicrocontrollersDokument17 Seiten8051 Microcontrollersapi-19631135Noch keine Bewertungen
- PPC512 ManualDokument187 SeitenPPC512 Manualaetlantra110Noch keine Bewertungen
- Microcontrolador msp430g2231Dokument61 SeitenMicrocontrolador msp430g2231Miguel Angel DkNoch keine Bewertungen
- KB3930 ENEerDokument199 SeitenKB3930 ENEerJuan Carlos Guerra MansoNoch keine Bewertungen
- Legends: L-Lecture T - Tutorial/Teacher Guided Theory Practice P - Practical C - Credit, ESE - EndDokument6 SeitenLegends: L-Lecture T - Tutorial/Teacher Guided Theory Practice P - Practical C - Credit, ESE - EndbhattparthivNoch keine Bewertungen
- HMI and PLC Connecting GuideDokument384 SeitenHMI and PLC Connecting Guidegpradipta100% (3)
- Cluster University of Jammu: (Examination To Be Held in 2017, 2018 and 2019) Title: Microprocessor and MicrocontrollerDokument2 SeitenCluster University of Jammu: (Examination To Be Held in 2017, 2018 and 2019) Title: Microprocessor and Microcontrollerkick singhNoch keine Bewertungen
- PC XT Technical Reference Apr84Dokument307 SeitenPC XT Technical Reference Apr84kgrhoads100% (1)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- MA1Dokument143 SeitenMA1Manish NarkhedeNoch keine Bewertungen
- Audio and Video Config PDFDokument12 SeitenAudio and Video Config PDFDanna Valentina Holguin DíazNoch keine Bewertungen
- Chapter 13: I/O SystemsDokument39 SeitenChapter 13: I/O SystemsSuraj ShahNoch keine Bewertungen
- Microprocessors and MicrocontrollersDokument1 SeiteMicroprocessors and Microcontrollersraj6689Noch keine Bewertungen
- Computer Architecture Question BankDokument16 SeitenComputer Architecture Question BankGreenkings100% (1)
- Microprocessor Lab Manual SEM IV 2013Dokument58 SeitenMicroprocessor Lab Manual SEM IV 2013Abir DuttaNoch keine Bewertungen
- Xorg Mailing List 2004 JulyDokument630 SeitenXorg Mailing List 2004 July5Uz11VuNoch keine Bewertungen
- Memory Mapped IDokument20 SeitenMemory Mapped IKanika SharmaNoch keine Bewertungen
- Computer Organization and Architecture (COA) May June Supply 2018 Solved Question PaperDokument32 SeitenComputer Organization and Architecture (COA) May June Supply 2018 Solved Question PapermaharshisanandyadavNoch keine Bewertungen
- PIC - IO PortsDokument43 SeitenPIC - IO PortsElena Gilbert100% (2)
- Microprocessor 8085Dokument25 SeitenMicroprocessor 8085hetal_limbaniNoch keine Bewertungen
- Chapter 3 - Tutorial2Dokument6 SeitenChapter 3 - Tutorial2Ziudine ZidaneNoch keine Bewertungen
- Anomie's SPC700Dokument11 SeitenAnomie's SPC700picolo789Noch keine Bewertungen
- Pin Diagram and Pin Description of 8085Dokument5 SeitenPin Diagram and Pin Description of 8085raman392Noch keine Bewertungen
- Arm Processor ArchitectureDokument84 SeitenArm Processor Architecturebhargava PrasadNoch keine Bewertungen
- 68hc705j1 Microcontrolador MotorolaDokument163 Seiten68hc705j1 Microcontrolador MotorolaNefi Martinez TorresNoch keine Bewertungen
- 8051 MicrocontrollerDokument29 Seiten8051 MicrocontrollerAnonymous VhbYReGNoch keine Bewertungen
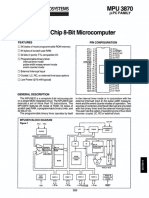
- Standard Microsystems Corporation: Features Pin ConfigurationDokument8 SeitenStandard Microsystems Corporation: Features Pin ConfigurationВячеслав НебесныйNoch keine Bewertungen
- Microprocessors NotesDokument205 SeitenMicroprocessors NotesDaniel LopezNoch keine Bewertungen
- MSP 430 F 2274Dokument94 SeitenMSP 430 F 2274Jyothi PrasadNoch keine Bewertungen
- Chapter 9: 8086/8088 Hardware SpecificationsDokument28 SeitenChapter 9: 8086/8088 Hardware SpecificationsChanchan LebumfacilNoch keine Bewertungen