Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- GenerationsDokument1 SeiteGenerationsSri SaiNoch keine Bewertungen
- PI Datasheet E-821 20150121Dokument5 SeitenPI Datasheet E-821 20150121Sri SaiNoch keine Bewertungen
- IR Sensor DatasheetDokument10 SeitenIR Sensor DatasheetSri SaiNoch keine Bewertungen
- Our Solar System: by Harshitha Yadav J.R.KDokument5 SeitenOur Solar System: by Harshitha Yadav J.R.KSri SaiNoch keine Bewertungen
- Heli TheoryDokument105 SeitenHeli TheorySri SaiNoch keine Bewertungen
- WilliamsDokument361 SeitenWilliamsSri SaiNoch keine Bewertungen
- Lesson - 2: Ports or Devices Communication and Communication - ProtocolsDokument41 SeitenLesson - 2: Ports or Devices Communication and Communication - ProtocolsSri SaiNoch keine Bewertungen
- Application of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureDokument4 SeitenApplication of A Fuzzy PI Controller in Regulation of Active Piezoelectric Composite StructureSri SaiNoch keine Bewertungen
- Macro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresDokument11 SeitenMacro-Fiber Composite Piezoelectric Rosettes For Acoustic Source Location in Complex StructuresSri SaiNoch keine Bewertungen
- Nano MFCDokument10 SeitenNano MFCSri SaiNoch keine Bewertungen
- Atmel Studio ReadmeDokument31 SeitenAtmel Studio Readmetitu1993Noch keine Bewertungen
- Characterization of Composite Piezoelectric Materials For Smart Joint ApplicationsDokument90 SeitenCharacterization of Composite Piezoelectric Materials For Smart Joint ApplicationsSri SaiNoch keine Bewertungen
- ThesisDokument127 SeitenThesisSri SaiNoch keine Bewertungen
- Controller ExcitationDokument8 SeitenController ExcitationSri SaiNoch keine Bewertungen
- MFC TtestDokument141 SeitenMFC TtestSri SaiNoch keine Bewertungen
- Hindi Vyakaran by Anwar ParvezDokument204 SeitenHindi Vyakaran by Anwar Parvezanwar_parvez08Noch keine Bewertungen
- Using Piezoelectric Materials On The Surface of Air Foils To Generate VoltageDokument13 SeitenUsing Piezoelectric Materials On The Surface of Air Foils To Generate VoltageSri SaiNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Circular MotionDokument21 SeitenCircular MotionAshwin SriramojuNoch keine Bewertungen
- RotationDokument4 SeitenRotationapi-431813813Noch keine Bewertungen
- EASE 4.0 Loudspeaker Device File Formats V4.04eDokument14 SeitenEASE 4.0 Loudspeaker Device File Formats V4.04eAdrian_666Noch keine Bewertungen
- L.24 Permanent Adjustments of A Dumpy LevelDokument7 SeitenL.24 Permanent Adjustments of A Dumpy LevelParamveer Sharma100% (1)
- FormulariumDokument7 SeitenFormulariumKamilNoch keine Bewertungen
- Fismat Bab 6,7Dokument44 SeitenFismat Bab 6,7Desima SimorangkirNoch keine Bewertungen
- Chapter 1 Astronomy The Cycles of The SkyDokument30 SeitenChapter 1 Astronomy The Cycles of The SkyMa. Lucille AbarracosoNoch keine Bewertungen
- Twin Opposing Vortexes and The Illusion of PullDokument99 SeitenTwin Opposing Vortexes and The Illusion of Pulld-fbuser-42282885100% (2)
- GiD User ManualDokument169 SeitenGiD User ManualjcazNoch keine Bewertungen
- Fundamentals of RobotDokument11 SeitenFundamentals of RobotVishalNoch keine Bewertungen
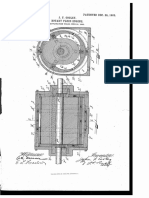
- No. 748,348. PATENTED DEC. 29, 1903. Rotary'Fluid Engine.: J. F. GooleyDokument4 SeitenNo. 748,348. PATENTED DEC. 29, 1903. Rotary'Fluid Engine.: J. F. Gooleymonem2014Noch keine Bewertungen
- Gyroscope Ship: Formulas To Be RememberDokument29 SeitenGyroscope Ship: Formulas To Be RememberEssKayNoch keine Bewertungen
- Laser ManualDokument97 SeitenLaser ManualglamuraNoch keine Bewertungen
- Circular DPP-1 PaperDokument2 SeitenCircular DPP-1 PaperᖰгіпcǝNoch keine Bewertungen
- j3d TutorialDokument346 Seitenj3d Tutorialrobo_c_programmer4515100% (1)
- Resultant of Forces PDFDokument109 SeitenResultant of Forces PDFDhruv KhuranaNoch keine Bewertungen
- Exercises On Statics and Rotational DynamicsDokument30 SeitenExercises On Statics and Rotational Dynamicselty TanNoch keine Bewertungen
- Comp and Supp HWDokument4 SeitenComp and Supp HWapi-2388800080% (1)
- Trigonometry - NCERT Solutions For Class 10 MathematicsDokument18 SeitenTrigonometry - NCERT Solutions For Class 10 MathematicsAayat QureshiNoch keine Bewertungen
- DYNAMICS LAB VIVA QUESTIONS FullDokument4 SeitenDYNAMICS LAB VIVA QUESTIONS FullSudipta NathNoch keine Bewertungen
- Matrices RotationsDokument7 SeitenMatrices RotationsAndreia NicolauNoch keine Bewertungen
- Lesson: Quarter 2 - Module: 1: Stem - Gp12Rediia-1 Stem - Gp12Rediia-3Dokument8 SeitenLesson: Quarter 2 - Module: 1: Stem - Gp12Rediia-1 Stem - Gp12Rediia-3Mildred Joy CudpayasNoch keine Bewertungen
- Mastercam 2017 Handbook Volume 2 SAMPLEDokument29 SeitenMastercam 2017 Handbook Volume 2 SAMPLE13239563Noch keine Bewertungen
- WSC Tecnomanager: Operator ManualDokument56 SeitenWSC Tecnomanager: Operator ManualVitaliy RyzhovNoch keine Bewertungen
- Dynamics 04 Kinematics of Rigid Body 1Dokument9 SeitenDynamics 04 Kinematics of Rigid Body 1Pongsakorn AjdchariyasakchaiNoch keine Bewertungen
- Trigonometry - Primary Trigonometric Ratios - All Level2 All PDFDokument12 SeitenTrigonometry - Primary Trigonometric Ratios - All Level2 All PDFElaine Batista0% (1)
- SURBEYINGDokument6 SeitenSURBEYINGDaille Wroble GrayNoch keine Bewertungen
- 33-6-Electronic - Magnetic and Optical Technologies-24!11!2021 (24-Nov-2021) Material I 24-11-2021 5.2 Optical MemoDokument16 Seiten33-6-Electronic - Magnetic and Optical Technologies-24!11!2021 (24-Nov-2021) Material I 24-11-2021 5.2 Optical MemoMudit JainNoch keine Bewertungen
- Test 20 Rotational DynamicssDokument4 SeitenTest 20 Rotational Dynamicssumved singh yadavNoch keine Bewertungen
- 1 - Trigonometric Ratio (2012)Dokument32 Seiten1 - Trigonometric Ratio (2012)Anonymous FckLmgFyNoch keine Bewertungen