Das könnte Ihnen auch gefallen
- Lenel Hardware PDFDokument504 SeitenLenel Hardware PDFDewytt Jhordan Cordoba CubillosNoch keine Bewertungen
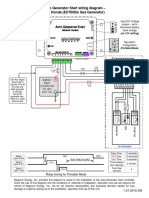
- Honda EU70IS WiringDokument1 SeiteHonda EU70IS WiringDave Wallace0% (1)
- Experiments H-TecDokument40 SeitenExperiments H-TecAmélia MoreiraNoch keine Bewertungen
- E1 Characteristic Curve of The Fuel CellDokument4 SeitenE1 Characteristic Curve of The Fuel Celllianghong.koh5914100% (1)
- 19 Induction Motor Fundamentals PDFDokument37 Seiten19 Induction Motor Fundamentals PDFsuchita jainNoch keine Bewertungen
- Speed Control For BLDC Using Pid AlgorithmDokument14 SeitenSpeed Control For BLDC Using Pid Algorithmtoufani95Noch keine Bewertungen
- Effect of BLDC Motor Commutation Schemes On Inverter Capacitor Size SelectionDokument5 SeitenEffect of BLDC Motor Commutation Schemes On Inverter Capacitor Size SelectionXristos LianNoch keine Bewertungen
- 2002 Peugeot 307 SWDokument137 Seiten2002 Peugeot 307 SWClaude SefakoNoch keine Bewertungen
- Yangke Yk60a Manual-V200912Dokument35 SeitenYangke Yk60a Manual-V200912Leo Burns0% (1)
- Chapter 1 Electricity Theory PDFDokument29 SeitenChapter 1 Electricity Theory PDFRosalie Vertudes0% (1)
- TRIO-5.8 7.5 8.5 BCD.00376 EN RevE WebDokument4 SeitenTRIO-5.8 7.5 8.5 BCD.00376 EN RevE Webluis gomez100% (1)
- FCRAR2012 InductiveChargingDokument7 SeitenFCRAR2012 InductiveChargingMuhammed HussainNoch keine Bewertungen
- Brushless Sensor ConfigDokument11 SeitenBrushless Sensor ConfigAlexandru TimofteNoch keine Bewertungen
- Hybrid Electric VehicleDokument10 SeitenHybrid Electric VehiclefvijayamiNoch keine Bewertungen
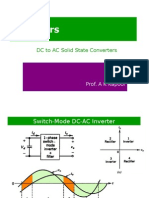
- InvertersDokument35 SeitenInvertersyashtNoch keine Bewertungen
- Power Converters Lecture - 1: Dr. U. T. ShamiDokument78 SeitenPower Converters Lecture - 1: Dr. U. T. ShamiM Waqar ZahidNoch keine Bewertungen
- HEVDokument40 SeitenHEVVwila NyirendaNoch keine Bewertungen
- 300watt Inverter DC 24V To AC 220V - Electronic Schematic DiagramDokument1 Seite300watt Inverter DC 24V To AC 220V - Electronic Schematic DiagramStefan CorneaNoch keine Bewertungen
- Diagnostic Sales Evening Component TestingDokument124 SeitenDiagnostic Sales Evening Component TestingbibNoch keine Bewertungen
- 10 InvertersDokument136 Seiten10 InverterszapzahtNoch keine Bewertungen
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDokument7 SeitenTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Voltage Divider PDFDokument14 SeitenVoltage Divider PDFعلی اصغر هاشمیNoch keine Bewertungen
- Vertical Axis Wind TurbineDokument12 SeitenVertical Axis Wind Turbinechotu aroraNoch keine Bewertungen
- Estabilizador Voltage ChopperDokument52 SeitenEstabilizador Voltage ChopperArmandinho CaveroNoch keine Bewertungen
- Service Manual RAINBOW 180E EnglishDokument54 SeitenService Manual RAINBOW 180E EnglishJaroslaw BrzozowskiNoch keine Bewertungen
- Project - Arduino MPPT Solar Charge Controller - HackadayDokument43 SeitenProject - Arduino MPPT Solar Charge Controller - Hackadaybazoka fransiskusNoch keine Bewertungen
- Service Manual Cobra 18WX STII EMG PDFDokument15 SeitenService Manual Cobra 18WX STII EMG PDFJohann SGNoch keine Bewertungen
- Audio Spectrum AnalyzerDokument6 SeitenAudio Spectrum AnalyzerPravin MevadaNoch keine Bewertungen
- Wind Screen WipersDokument7 SeitenWind Screen Wiperszac18992Noch keine Bewertungen
- Electronic Code Locking Using GSMDokument63 SeitenElectronic Code Locking Using GSMSumanth MatamNoch keine Bewertungen
- Electrical Power ProjectDokument12 SeitenElectrical Power ProjectsrnkaNoch keine Bewertungen
- Design and Analysis of On-Road Charging Electric Vehicle (OLEV)Dokument5 SeitenDesign and Analysis of On-Road Charging Electric Vehicle (OLEV)International Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- A Managment Strategy For Solar Panel-Battery-Super Capacitor Hybrid Energy System in Solar CarDokument6 SeitenA Managment Strategy For Solar Panel-Battery-Super Capacitor Hybrid Energy System in Solar CarMarcelo Millapan100% (1)
- ZVS Full BridgeDokument20 SeitenZVS Full Bridgejameschall1Noch keine Bewertungen
- Design Bi-Directional Charger For Phev Application: Chaudhari Tejal A., Bariya Chetan K., Upadhyay Chetan DDokument6 SeitenDesign Bi-Directional Charger For Phev Application: Chaudhari Tejal A., Bariya Chetan K., Upadhyay Chetan Dmohd786azharNoch keine Bewertungen
- Group-3 - (Battery Charging Circuit Using SCR)Dokument15 SeitenGroup-3 - (Battery Charging Circuit Using SCR)Nayem IslamNoch keine Bewertungen
- Samsung La32n71b La40n71b La46n71b Chassis Gnm32asa Gnm40asa Gnm46asa PDFDokument183 SeitenSamsung La32n71b La40n71b La46n71b Chassis Gnm32asa Gnm40asa Gnm46asa PDFCigombong TechnikNoch keine Bewertungen
- DCAC Pure Sine WaveDokument69 SeitenDCAC Pure Sine WaveTrie NouNoch keine Bewertungen
- Instructions de SécuritéDokument106 SeitenInstructions de SécuritéMonjolNoch keine Bewertungen
- How Chargers WorkDokument21 SeitenHow Chargers WorkMuhammad Irfan RiazNoch keine Bewertungen
- Hybrid Electric Vehicle (Rahul Raj)Dokument13 SeitenHybrid Electric Vehicle (Rahul Raj)Rahul Raj100% (2)
- Simulink Battery ModelDokument12 SeitenSimulink Battery ModelnpnegociosNoch keine Bewertungen
- Sony Service Manual KLV-40V410A-BrazilDokument88 SeitenSony Service Manual KLV-40V410A-Brazilgimenes_r0% (1)
- COnversion Ac A DCDokument15 SeitenCOnversion Ac A DCLuis SilvaNoch keine Bewertungen
- BY Pratik Kumar Singh Roll No. 16529Dokument18 SeitenBY Pratik Kumar Singh Roll No. 16529Yogesh AnandNoch keine Bewertungen
- A Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationsDokument3 SeitenA Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationslionpjrNoch keine Bewertungen
- MicroInverter 01444ADokument54 SeitenMicroInverter 01444ArqwertyNoch keine Bewertungen
- Dokumen - Tips - 60gb ps3 Service Manual 3rd Edition PDFDokument45 SeitenDokumen - Tips - 60gb ps3 Service Manual 3rd Edition PDFMiguelangelo FentanesNoch keine Bewertungen
- Power Upgrading of Transmission Lines by Combining Ac & DCDokument68 SeitenPower Upgrading of Transmission Lines by Combining Ac & DCrashidmd42100% (2)
- Photovoltaic: PrincipleDokument4 SeitenPhotovoltaic: PrinciplePrince GauravNoch keine Bewertungen
- Wireless Charging by RF SignalDokument16 SeitenWireless Charging by RF Signalgautam1992chaurasiaNoch keine Bewertungen
- Solar TrackerDokument13 SeitenSolar TrackerMuthuRajNoch keine Bewertungen
- Evtp Text BookDokument78 SeitenEvtp Text BookrufeenaNoch keine Bewertungen
- Generating 50Hz PWM Using PIC16F877ADokument2 SeitenGenerating 50Hz PWM Using PIC16F877AZarko DacevicNoch keine Bewertungen
- Application of Brushless DC Motor in MilitaryDokument10 SeitenApplication of Brushless DC Motor in Militarymighty_heart100% (1)
- Supercapacitors: New Super Energy Storage Device: Nitin Kathuria, Assistant Professor Richa Sharma, LecturerDokument4 SeitenSupercapacitors: New Super Energy Storage Device: Nitin Kathuria, Assistant Professor Richa Sharma, LecturerNitin Kathuria100% (1)
- ST MicroInverter SchemeticDokument12 SeitenST MicroInverter Schemeticpuspendu janaNoch keine Bewertungen
- Solar InverterDokument20 SeitenSolar InverterHacker 123Noch keine Bewertungen
- PWMcircuit 08Dokument10 SeitenPWMcircuit 08kcarringNoch keine Bewertungen
- Jim Williams An04Dokument8 SeitenJim Williams An04MartinNoch keine Bewertungen
- v2g ReportDokument95 Seitenv2g Reportsavita malisNoch keine Bewertungen
- Power of BatteriesDokument13 SeitenPower of BatteriesancientasmNoch keine Bewertungen
- A Safe Method For Spot Welding v1.11 5 12Dokument11 SeitenA Safe Method For Spot Welding v1.11 5 12Petar Ivan100% (1)
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968Von EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968Noch keine Bewertungen
- Universiti Kuala Lumpur: Course Name: Course CodeDokument70 SeitenUniversiti Kuala Lumpur: Course Name: Course CodeziqnisNoch keine Bewertungen
- Ee8017 High Voltage Direct Current TransmissionDokument12 SeitenEe8017 High Voltage Direct Current TransmissionRaja AjithNoch keine Bewertungen
- Review Guide Series Review Guide Series: FigurDokument7 SeitenReview Guide Series Review Guide Series: FigurJOHN JOSEPH LATRESNoch keine Bewertungen
- Eaton XT Contactor Training 2020 04 22Dokument38 SeitenEaton XT Contactor Training 2020 04 22Soluciones ElectricasNoch keine Bewertungen
- Ieee 295-1969Dokument22 SeitenIeee 295-1969rodelecNoch keine Bewertungen
- Max IoDokument78 SeitenMax Iomannycase13Noch keine Bewertungen
- Assignment Sample Technical English 1Dokument7 SeitenAssignment Sample Technical English 1Ca mi Tâm Hoai 1406Noch keine Bewertungen
- Liberia Wirng Regulations Final Validated PublishedDokument24 SeitenLiberia Wirng Regulations Final Validated PublishedJohn ConstanceNoch keine Bewertungen
- Lecture 2Dokument29 SeitenLecture 2Azriq BahariNoch keine Bewertungen
- GPV Fuses: Overcurrent and Overvoltage ProtectionDokument32 SeitenGPV Fuses: Overcurrent and Overvoltage Protectionskavens1801Noch keine Bewertungen
- NAAC AQAR Academic Year (2021-22)Dokument193 SeitenNAAC AQAR Academic Year (2021-22)Kavishree RNoch keine Bewertungen
- ISM User ManualDokument13 SeitenISM User ManualSegeyNoch keine Bewertungen
- A Practical Guide For The Selection of Power Inductors For DC DC Converters PDFDokument6 SeitenA Practical Guide For The Selection of Power Inductors For DC DC Converters PDFŽarko DačevićNoch keine Bewertungen
- Microgrid ThesisDokument163 SeitenMicrogrid ThesisAshik AhmedNoch keine Bewertungen
- Wave Shaping and Swiching CircuitsDokument4 SeitenWave Shaping and Swiching Circuitskaran007_mNoch keine Bewertungen
- Gener. Inverter. KGE3000ti Manual de Servicio PDFDokument35 SeitenGener. Inverter. KGE3000ti Manual de Servicio PDFManuel Sierra100% (1)
- Lesson 5 Direct Current Circuits1Dokument8 SeitenLesson 5 Direct Current Circuits1AjzNoch keine Bewertungen
- Energy Storage and Battery Technology in IndonesiaDokument4 SeitenEnergy Storage and Battery Technology in IndonesiaInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- (DownSub - Com) Chevrolet Bolt EV High Voltage ComponentsDokument24 Seiten(DownSub - Com) Chevrolet Bolt EV High Voltage Componentsabhi_cat16Noch keine Bewertungen
- Filtered Power SupplyDokument13 SeitenFiltered Power SupplyGenesis HereNoch keine Bewertungen
- 1769-Pa2, 1769-PB2, 1769-Pa4Dokument36 Seiten1769-Pa2, 1769-PB2, 1769-Pa4Hilder Ramirez PuellesNoch keine Bewertungen
- Lab 8Dokument6 SeitenLab 8Yisela BolanosNoch keine Bewertungen
- Multifuge 3 S-R/3 L-R, Legend RT 120V 50/60 HZ Service ManualDokument74 SeitenMultifuge 3 S-R/3 L-R, Legend RT 120V 50/60 HZ Service ManualShan AhmadNoch keine Bewertungen
- Rommel Chapter 1 & 2Dokument22 SeitenRommel Chapter 1 & 2Erika DonglawenNoch keine Bewertungen
- RTU500 Series Catalog - 2016 - WEB2 PDFDokument68 SeitenRTU500 Series Catalog - 2016 - WEB2 PDFIlaiyaa RajaNoch keine Bewertungen
- Energies: Design and Simulation of Romanian Solar Energy Charging Station For Electric VehiclesDokument16 SeitenEnergies: Design and Simulation of Romanian Solar Energy Charging Station For Electric VehiclesAndresMeraNoch keine Bewertungen