Das könnte Ihnen auch gefallen
- ACCP D8 7020 Trim1 PracticalPaper Set1 SolnDokument2 SeitenACCP D8 7020 Trim1 PracticalPaper Set1 SolnRadha RamanNoch keine Bewertungen
- 1.convert An Audio/video File in Array of Bytes. 2.use A Cryptographic Algorithm To Encrypt/decryptDokument2 Seiten1.convert An Audio/video File in Array of Bytes. 2.use A Cryptographic Algorithm To Encrypt/decryptRadha RamanNoch keine Bewertungen
- The Basic Concepts of Algorithms: 2.1 The Minimal Spanning Tree ProblemDokument32 SeitenThe Basic Concepts of Algorithms: 2.1 The Minimal Spanning Tree ProblemManjunath KurubaNoch keine Bewertungen
- KNNDokument11 SeitenKNNRadha RamanNoch keine Bewertungen
- Page Replacement Algorithms Important Donot DeleteDokument10 SeitenPage Replacement Algorithms Important Donot DeletesabirsvcmNoch keine Bewertungen
- Black and WhiteDokument66 SeitenBlack and WhiteRadha RamanNoch keine Bewertungen
- AbstractDokument1 SeiteAbstractRadha RamanNoch keine Bewertungen
- Display Images in ASPDokument4 SeitenDisplay Images in ASPRadha RamanNoch keine Bewertungen
- SkdnssecDokument10 SeitenSkdnssecRadha RamanNoch keine Bewertungen
- E Libary SynopsisDokument7 SeitenE Libary SynopsisRadha RamanNoch keine Bewertungen
- File Zilla FTPDokument3 SeitenFile Zilla FTPRadha RamanNoch keine Bewertungen
- Format GridviewDokument2 SeitenFormat GridviewRadha RamanNoch keine Bewertungen
- Nfa DfaDokument13 SeitenNfa DfaRadha RamanNoch keine Bewertungen
- Format GridviewDokument2 SeitenFormat GridviewRadha RamanNoch keine Bewertungen
- Content: Chapter Title Page NoDokument3 SeitenContent: Chapter Title Page NoRadha RamanNoch keine Bewertungen
- OsDokument7 SeitenOsRadha RamanNoch keine Bewertungen
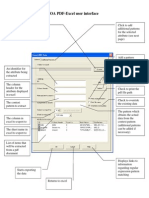
- Woa PDF-XL User InterfaceDokument2 SeitenWoa PDF-XL User InterfaceRadha RamanNoch keine Bewertungen
- MI0038 AnswerDokument13 SeitenMI0038 AnswerRadha RamanNoch keine Bewertungen
- Black and WhiteDokument66 SeitenBlack and WhiteRadha RamanNoch keine Bewertungen
- MI0041 AnswerDokument15 SeitenMI0041 AnswerRadha RamanNoch keine Bewertungen
- Source Code Features: Malicious Url Is Detected by Using 3 Major FeaturesDokument3 SeitenSource Code Features: Malicious Url Is Detected by Using 3 Major FeaturesRadha RamanNoch keine Bewertungen
- Perform The Following Conversion: (3+3 Marks) A. (ABE) Ans: (101010111110)Dokument3 SeitenPerform The Following Conversion: (3+3 Marks) A. (ABE) Ans: (101010111110)Radha RamanNoch keine Bewertungen
- AstarDokument22 SeitenAstarRadha RamanNoch keine Bewertungen
- PaperDokument4 SeitenPaperRadha RamanNoch keine Bewertungen
- Class Path SettingDokument1 SeiteClass Path SettingRadha RamanNoch keine Bewertungen
- 17 11 11Dokument5 Seiten17 11 11Radha RamanNoch keine Bewertungen
-  Œdental Patient Management SystemâDokument13 Seiten Œdental Patient Management SystemâRadha RamanNoch keine Bewertungen
- Database Snapshot: Following Is A List of Advantages Associated With SnapshotsDokument8 SeitenDatabase Snapshot: Following Is A List of Advantages Associated With SnapshotsRadha RamanNoch keine Bewertungen
- Context DFDDokument1 SeiteContext DFDRadha RamanNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Residue Number SystemsDokument45 SeitenResidue Number SystemsMeera Bommi MNoch keine Bewertungen
- Divide and Conquer DAADokument88 SeitenDivide and Conquer DAANandeesh H SNoch keine Bewertungen
- Laplace Table PDFDokument2 SeitenLaplace Table PDFKu Ble YanNoch keine Bewertungen
- Trig IdentitiesDokument8 SeitenTrig IdentitiesZeck Aviel Alcantara100% (1)
- On The Partial Finite Alternating Sums of Reciprocals of Balancing and Lucas-Balancing NumbersDokument16 SeitenOn The Partial Finite Alternating Sums of Reciprocals of Balancing and Lucas-Balancing Numbersutkal keshari duttaNoch keine Bewertungen
- Prime Numbers of The Kind n2 1Dokument4 SeitenPrime Numbers of The Kind n2 1humejiasNoch keine Bewertungen
- C) M! (N-M!: Permutations and CombinationsDokument5 SeitenC) M! (N-M!: Permutations and CombinationsAditya BelekarNoch keine Bewertungen
- Elective MathsDokument4 SeitenElective Mathsemmastronggy80% (5)
- Assignment-9 Priority Queue Spanning Balancing Trees Hash Tables 1Dokument3 SeitenAssignment-9 Priority Queue Spanning Balancing Trees Hash Tables 1api-491066982Noch keine Bewertungen
- DSL Oral QuestionDokument5 SeitenDSL Oral QuestionAmit SangaleNoch keine Bewertungen
- Math 4 Summary List of Lessons 1st Grading - MontellanoDokument4 SeitenMath 4 Summary List of Lessons 1st Grading - MontellanoJhon Ray Cagampang0% (1)
- LISP Lect 4 I O HOFDokument62 SeitenLISP Lect 4 I O HOFmanitNoch keine Bewertungen
- Real NumbersDokument20 SeitenReal NumbersTanya JagadeeshNoch keine Bewertungen
- CH 2Dokument9 SeitenCH 2Sourabh123456789Noch keine Bewertungen
- 2 MarksDokument16 Seiten2 MarkssiswariyaNoch keine Bewertungen
- Ncert Most Imp Questions BookletDokument365 SeitenNcert Most Imp Questions Bookletshubham Awasthi100% (1)
- Magma (Computer Algebra System) - Wikipedia, The Free EncyclopediaDokument3 SeitenMagma (Computer Algebra System) - Wikipedia, The Free Encyclopediabeta2009Noch keine Bewertungen
- AKTU SyllabusDokument18 SeitenAKTU SyllabusAakash ChoudharyNoch keine Bewertungen
- Zeros of The Derivatives of The Riemann Zeta Function On Re S 1/2Dokument11 SeitenZeros of The Derivatives of The Riemann Zeta Function On Re S 1/2Nikos MantzakourasNoch keine Bewertungen
- 07 Network Flow IDokument87 Seiten07 Network Flow ISheetanshu SinhaNoch keine Bewertungen
- Subject: Operations Research 1 Assignment No.1: Manuel S. Enverga University FoundationDokument10 SeitenSubject: Operations Research 1 Assignment No.1: Manuel S. Enverga University FoundationCecil Kian BotalonNoch keine Bewertungen
- Discrete Mathematics and Its Application - Chapter 7Dokument46 SeitenDiscrete Mathematics and Its Application - Chapter 7Funkey dunkey100% (1)
- Geek - TCS Verbal Ability Test Sample Email - Set5Dokument8 SeitenGeek - TCS Verbal Ability Test Sample Email - Set5AyasreePaulNoch keine Bewertungen
- Linear ProgrammingDokument47 SeitenLinear ProgrammingOkibe Jeffery IfereNoch keine Bewertungen
- Signal Flow Graph - GATE Study Material in PDFDokument5 SeitenSignal Flow Graph - GATE Study Material in PDFAalen IssacNoch keine Bewertungen
- Binomial Theorem-02 - Solved ExampleDokument12 SeitenBinomial Theorem-02 - Solved ExampleRaju SinghNoch keine Bewertungen
- 6 - Mathematics - of - Graphs - PPTX Filename - UTF-8''6 Mathematics of GraphsDokument46 Seiten6 - Mathematics - of - Graphs - PPTX Filename - UTF-8''6 Mathematics of GraphsLia Alegre0% (2)
- Who Introduced The Concept of Sets?Dokument5 SeitenWho Introduced The Concept of Sets?lalit KumarNoch keine Bewertungen
- ExponentsDokument5 SeitenExponentsarmailgm100% (1)
- PDF 2 6 Study Guide and Intervention Special FunctionsDokument2 SeitenPDF 2 6 Study Guide and Intervention Special FunctionsVIPNoch keine Bewertungen