Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Baroque MusicDokument15 SeitenBaroque Musicthot777100% (2)
- Komatsu HD785-7 Shop Manual PDFDokument1.491 SeitenKomatsu HD785-7 Shop Manual PDFIB EldinNoch keine Bewertungen
- Technical Seminar Agenda and Generator System OverviewDokument86 SeitenTechnical Seminar Agenda and Generator System OverviewKenneth100% (1)
- Models of Collaboration Between Education and ServicesDokument17 SeitenModels of Collaboration Between Education and ServicesSimran Josan100% (3)
- Metamath: A Computer Language For Mathematical ProofsDokument247 SeitenMetamath: A Computer Language For Mathematical ProofsJohn DoeNoch keine Bewertungen
- ASTM 3950 Testing Methods For Strapping Versie 2007 211007 PDFDokument7 SeitenASTM 3950 Testing Methods For Strapping Versie 2007 211007 PDFNestor CzerwackiNoch keine Bewertungen
- Theories & Models of LearningDokument33 SeitenTheories & Models of LearningAna Paulina Suárez CervantesNoch keine Bewertungen
- Properties and Behavior of GasesDokument34 SeitenProperties and Behavior of GasesPaul Jeremiah Serrano NarvaezNoch keine Bewertungen
- RTL8185 Windows7 FixDokument2 SeitenRTL8185 Windows7 FixJamesHackNoch keine Bewertungen
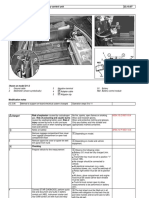
- Checking battery control unitDokument3 SeitenChecking battery control unitjuanNoch keine Bewertungen
- Chapter 7Dokument22 SeitenChapter 7one loveNoch keine Bewertungen
- English NotesDokument39 SeitenEnglish NotesNorAini MohamadNoch keine Bewertungen
- Modern Pharmacy Layout TrendsDokument9 SeitenModern Pharmacy Layout TrendsRaheem KhanNoch keine Bewertungen
- Equilibrium of Supply and DemandDokument4 SeitenEquilibrium of Supply and DemandJuina Mhay Baldillo ChunacoNoch keine Bewertungen
- Lali The Sun Also Rises Final PaperDokument4 SeitenLali The Sun Also Rises Final PaperDaniel AdamsNoch keine Bewertungen
- MicrotoxOmni Software Version 4Dokument12 SeitenMicrotoxOmni Software Version 4Louise Veronica JoseNoch keine Bewertungen
- Justification: Justification: Doctrine of Council of TrentDokument4 SeitenJustification: Justification: Doctrine of Council of TrentMihai SarbuNoch keine Bewertungen
- TK17 V10 ReadmeDokument72 SeitenTK17 V10 ReadmePaula PérezNoch keine Bewertungen
- Using The 12c Real-Time SQL Monitoring Report History For Performance AnalysisDokument39 SeitenUsing The 12c Real-Time SQL Monitoring Report History For Performance AnalysisJack WangNoch keine Bewertungen
- Earth's StructureDokument10 SeitenEarth's StructureMaitum Gemark BalazonNoch keine Bewertungen
- Key concepts in biology examDokument19 SeitenKey concepts in biology examAditya RaiNoch keine Bewertungen
- A P1qneer 1n Neuroscience: Rita Levi-MontalciniDokument43 SeitenA P1qneer 1n Neuroscience: Rita Levi-MontalciniAntNoch keine Bewertungen
- Wag Acquisition v. Vubeology Et. Al.Dokument29 SeitenWag Acquisition v. Vubeology Et. Al.Patent LitigationNoch keine Bewertungen
- En GBDokument4 SeitenEn GBahmedNoch keine Bewertungen
- Future TenseDokument6 SeitenFuture TenseMuhammad Ibnu LaksonoNoch keine Bewertungen
- Parameter Pengelasan SMAW: No Bahan Diameter Ampere Polaritas Penetrasi Rekomendasi Posisi PengguanaanDokument2 SeitenParameter Pengelasan SMAW: No Bahan Diameter Ampere Polaritas Penetrasi Rekomendasi Posisi PengguanaanKhamdi AfandiNoch keine Bewertungen
- Dada and Buddhist Thought - Sung-Won Ko PDFDokument24 SeitenDada and Buddhist Thought - Sung-Won Ko PDFJuan Manuel Gomez GarcíaNoch keine Bewertungen
- Best Practice Guidelines For Cardiac Rehabilitation and Secondary Prevention: A SynopsisDokument16 SeitenBest Practice Guidelines For Cardiac Rehabilitation and Secondary Prevention: A SynopsisErdy VincentNoch keine Bewertungen
- QF-16 Security ProceduresDokument55 SeitenQF-16 Security Proceduresmaruka33Noch keine Bewertungen
- Business Analytics ModuleDokument22 SeitenBusiness Analytics ModuleMarjon DimafilisNoch keine Bewertungen